anyway to control 2 axis (not standalone) by 1 input
29 Sep 2017 15:15 #99619
by thang
anyway to control 2 axis (not standalone) by 1 input was created by thang
Hi, i have a problem need help.
example, i have an arm robot (TRR). i want to use T(trans) to control axis X and RR(rot) to control only axis Y. there is a equation decribe relationship between R1 and R2 like R1 = f(R2).
The way to control the robot in world mode by inverse kinematic is easy but how do i control the robot in joint mode, the input only T and R2? What is the loop-control used in joint mode:
joint input---> forward kinematic---->inversekinematic--->joint output
>control motor---->joint input.
or
joint input --->control motor ---->forward kinematic----> joint input
example, i have an arm robot (TRR). i want to use T(trans) to control axis X and RR(rot) to control only axis Y. there is a equation decribe relationship between R1 and R2 like R1 = f(R2).
The way to control the robot in world mode by inverse kinematic is easy but how do i control the robot in joint mode, the input only T and R2? What is the loop-control used in joint mode:
joint input---> forward kinematic---->inversekinematic--->joint output
>control motor---->joint input.
or
joint input --->control motor ---->forward kinematic----> joint input
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Away
- Platinum Member
-

Less
More
- Posts: 4963
- Thank you received: 1369
29 Sep 2017 15:24 #99621
by Todd Zuercher
Replied by Todd Zuercher on topic anyway to control 2 axis (not standalone) by 1 input
The kinematics are not used in Joint mode. Joint mode is direct control of the motor.
The following user(s) said Thank You: thang
Please Log in or Create an account to join the conversation.
29 Sep 2017 15:41 #99624
by thang
Replied by thang on topic anyway to control 2 axis (not standalone) by 1 input
then the problem is becoming harder, do you have any idea
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4963
- Thank you received: 1369
29 Sep 2017 15:58 #99626
by Todd Zuercher
Replied by Todd Zuercher on topic anyway to control 2 axis (not standalone) by 1 input
What exactly are you trying to accomplish?
Some sort of coordinated jogging that isn't the same as world mode, or joint mode?
Some sort of coordinated jogging that isn't the same as world mode, or joint mode?
Please Log in or Create an account to join the conversation.
30 Sep 2017 00:17 - 30 Sep 2017 00:20 #99653
by thang
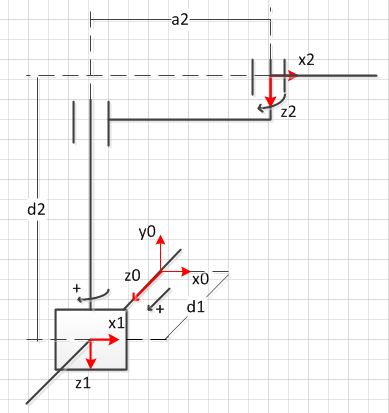
like this robot, TRR, because the axis T control Z, R1 and R2 control X, when i move R2, R1 must be controlled (R1 depend on R2)
Replied by thang on topic anyway to control 2 axis (not standalone) by 1 input
like this robot, TRR, because the axis T control Z, R1 and R2 control X, when i move R2, R1 must be controlled (R1 depend on R2)
Last edit: 30 Sep 2017 00:20 by thang.
Please Log in or Create an account to join the conversation.
30 Sep 2017 05:18 #99661
by thang
Replied by thang on topic anyway to control 2 axis (not standalone) by 1 input
Just confirm my problem is solved, tks you very much
Please Log in or Create an account to join the conversation.
Time to create page: 0.147 seconds