how to synchronize two servomotors
07 Jun 2017 21:08 #94269
by Jasper 3
how to synchronize two servomotors was created by Jasper 3
Hey,
i've some problems by snchronizing two servomotors. Here is a Picture of the two servomotors.
I use Leadshine 400W servo and dirvers.
I'm also using a mesa 7i85s card to control the servos via step and dir.
In LinuxCNC I use the tandem axis so the second motor should do the same like the first.
The problem is that sometimes the motors start to struggle. I assume that one motor is working against the other.
I think I need a master and one slave Servo. But I'm not sure if this is possible with my drivers.
Is ther any possible solution in Linux cnc for this problem?
I hope you can help me. If you need further information I will give it to you.
Thanks and best regards Jasper
i've some problems by snchronizing two servomotors. Here is a Picture of the two servomotors.
Attachment not found
I use Leadshine 400W servo and dirvers.
I'm also using a mesa 7i85s card to control the servos via step and dir.
In LinuxCNC I use the tandem axis so the second motor should do the same like the first.
The problem is that sometimes the motors start to struggle. I assume that one motor is working against the other.
I think I need a master and one slave Servo. But I'm not sure if this is possible with my drivers.
Is ther any possible solution in Linux cnc for this problem?
I hope you can help me. If you need further information I will give it to you.
Thanks and best regards Jasper
Please Log in or Create an account to join the conversation.

07 Jun 2017 23:22 #94272
by PCW
Replied by PCW on topic how to synchronize two servomotors
Are the drives tuned identically?
How is the drive duplication handled in the HAL file?
How is the drive duplication handled in the HAL file?
Please Log in or Create an account to join the conversation.
08 Jun 2017 05:17 - 08 Jun 2017 05:18 #94276
by Jasper 3
Replied by Jasper 3 on topic how to synchronize two servomotors
Hey thanks for your response.
The driver parameter are all the same I double checkt it!
In the Hal file I used the tandemaxis mode. So only that was the configwizard generates. I can upload the hal file tomorrow than I'm in my workshop again.
Is there any possibility to get rid of this problem by increasing the stepspace or other parameter?
I forgot to mention that bothe motors ar also conected via timing belt. (only for safty reasons)
Here is a video of my cnc working fine. I think also the stuttering appears mostly when the servomotors rotate slowly.
thanks and best regards
Jasper
The driver parameter are all the same I double checkt it!
In the Hal file I used the tandemaxis mode. So only that was the configwizard generates. I can upload the hal file tomorrow than I'm in my workshop again.
Is there any possibility to get rid of this problem by increasing the stepspace or other parameter?
I forgot to mention that bothe motors ar also conected via timing belt. (only for safty reasons)
Here is a video of my cnc working fine. I think also the stuttering appears mostly when the servomotors rotate slowly.
thanks and best regards
Jasper
Last edit: 08 Jun 2017 05:18 by Jasper 3.
Please Log in or Create an account to join the conversation.
09 Jun 2017 13:06 #94339
by Jasper 3
Replied by Jasper 3 on topic how to synchronize two servomotors
Hey,
Ive got one question.
This link discribes the Encoder_Ratio.
I think I could use it to synchronize my servomotors. But I have no idea how to implemet it into my hal file?
any suggestions?
thanks a lot
Jasper
Ive got one question.
This link discribes the Encoder_Ratio.
I think I could use it to synchronize my servomotors. But I have no idea how to implemet it into my hal file?
any suggestions?
thanks a lot
Jasper
Please Log in or Create an account to join the conversation.
12 Jun 2017 06:39 #94421
by Jasper 3
Replied by Jasper 3 on topic how to synchronize two servomotors
hey,
I just got my hal and ini files. I hope you can help me now.
Thanks and best regars Jasper
I just got my hal and ini files. I hope you can help me now.
Thanks and best regars Jasper
Please Log in or Create an account to join the conversation.
12 Jun 2017 18:24 #94432
by PCW
Replied by PCW on topic how to synchronize two servomotors
The basic setup issue is that you need to duplicate _all_ the Y signals and components for the tandem-Y axis.
You are missing the tandem-Y PID component and all its connections.
You also have the Y velocity driving the tandem Y stepgen, this cannot work in the long term as the axis will get out of sync
if you dont have 2 independent closed loops.
The only common signals between Y and tandem-Y should be the position command and enable.
You are missing the tandem-Y PID component and all its connections.
You also have the Y velocity driving the tandem Y stepgen, this cannot work in the long term as the axis will get out of sync
if you dont have 2 independent closed loops.
The only common signals between Y and tandem-Y should be the position command and enable.
Please Log in or Create an account to join the conversation.
12 Jun 2017 19:42 - 12 Jun 2017 19:43 #94433
by Jasper 3
Replied by Jasper 3 on topic how to synchronize two servomotors
Hey,
puh..
i just tried to do what you said.
so that's how far I'm yet.
What should I write instead of the questionmarks in my hal file. does the file is so far correct?
I'm not shure what you mean with your commen signals. Its just for checking if there is a difference between both locations?
puh..
i just tried to do what you said.
so that's how far I'm yet.
What should I write instead of the questionmarks in my hal file. does the file is so far correct?
I'm not shure what you mean with your commen signals. Its just for checking if there is a difference between both locations?
Last edit: 12 Jun 2017 19:43 by Jasper 3.
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Offline
- Platinum Member
-

Less
More
- Posts: 4962
- Thank you received: 1369
12 Jun 2017 20:18 - 12 Jun 2017 20:20 #94434
by Todd Zuercher
Replied by Todd Zuercher on topic how to synchronize two servomotors
The line where you have the question marks is not needed, you've already connected that signal to the output pin "axis.1.motor-pos-cmd" and there can be only one.
But I don't think you are quite headed in the direction you need to go.
I would suggest you switch to the Master branch of Linuxcnc. It has the capability of doing independent homing of slaved joints, for a moving gantry type machine.
What you are doing now will slave both joints to the y axis command, but will not give you any means to square them. Where they are when you turn on the machine, is where they will be locked together, with no adjust-ability. You might be able to make it work with 2.7 if you used the gantry component. (but it is a work-around hack at best for slaving 2 joints.)
But I don't think you are quite headed in the direction you need to go.
I would suggest you switch to the Master branch of Linuxcnc. It has the capability of doing independent homing of slaved joints, for a moving gantry type machine.
What you are doing now will slave both joints to the y axis command, but will not give you any means to square them. Where they are when you turn on the machine, is where they will be locked together, with no adjust-ability. You might be able to make it work with 2.7 if you used the gantry component. (but it is a work-around hack at best for slaving 2 joints.)
Last edit: 12 Jun 2017 20:20 by Todd Zuercher.
Please Log in or Create an account to join the conversation.
12 Jun 2017 20:45 #94435
by Jasper 3
Replied by Jasper 3 on topic how to synchronize two servomotors
hey,
the Master branch sounds good. Is there any documentation an possibility to download it?
the best would be to have a Master axis and one slave axis.
But I didn't get it working.
the Master branch sounds good. Is there any documentation an possibility to download it?
the best would be to have a Master axis and one slave axis.
But I didn't get it working.
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Offline
- Platinum Member
-
Less
More
- Posts: 4962
- Thank you received: 1369
13 Jun 2017 02:08 #94440
by Todd Zuercher
Replied by Todd Zuercher on topic how to synchronize two servomotors
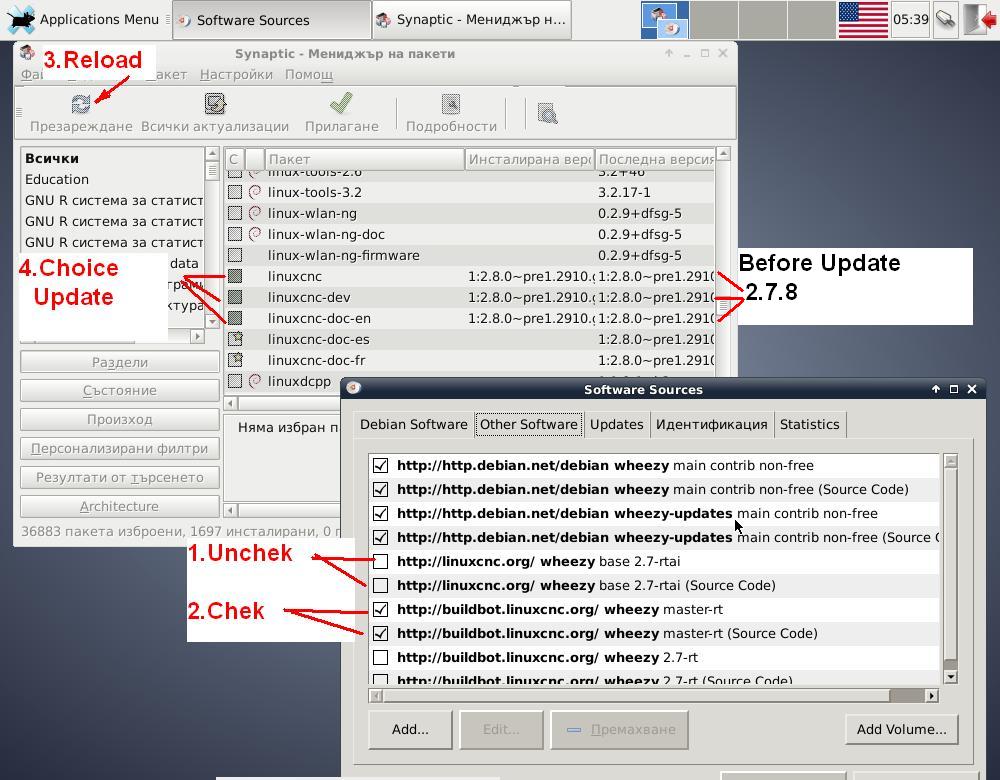
It is simple to update from 2.7 to Master using Synaptic.
Here is a screen shot that pretty much sums up all the steps to update to Master,
(I shamelessly copied it from another thread on this forum.)
Here is a screen shot that pretty much sums up all the steps to update to Master,
(I shamelessly copied it from another thread on this forum.)
Please Log in or Create an account to join the conversation.
Time to create page: 0.758 seconds