5i23 7i49 7i52 8i20
- clematites93
- Offline
- Senior Member
-

Less
More
- Posts: 62
- Thank you received: 0
13 Jul 2017 17:25 #95764
by clematites93
5i23 7i49 7i52 8i20 was created by clematites93
Hi,
For my lathe, I would like to use the combination 5i23 7i49 (resolver) 7i52 --> (8i20).
For the first trials, I use "rmsvss6_8.bit" firmware.
* With 5i23 + 7i49 (alone) W1 right position select --> cable power select
For reference sine wave (drive voltage), when I measure, with an external oscilloscope, the voltage between RESDRV0- and RESDRV0 + I find 6V either 4.2 V RMS (about). Except error on my part")
With W2 in the down position (1/2 of full scale), the voltage between RESDRV4- and RESDRV4 + is 3 V either 2.1 VRMS.
First question please : in the notice "default drive voltage is approximately 2V RMS". Is this normal ?
* With 5i23 + 7i49 + motor : Numservomac resolver Tamagaya Seiki BRX type : TS2018... 6V
Halscope :
When I turn the shaft, hm2.5i23.0.resolver.00.count and hm2.5i23.0.resolver.00.angle make it possible to obtain curves apparently valid.
Halmeter :
On the other hand, even when I do not turn the shaft, hm2.5i23.0.resolver.00.count "runs" without stopping
Second question please : Is this normal ?
Thank you in advance and excuse my approximate English
For my lathe, I would like to use the combination 5i23 7i49 (resolver) 7i52 --> (8i20).
For the first trials, I use "rmsvss6_8.bit" firmware.
* With 5i23 + 7i49 (alone) W1 right position select --> cable power select
For reference sine wave (drive voltage), when I measure, with an external oscilloscope, the voltage between RESDRV0- and RESDRV0 + I find 6V either 4.2 V RMS (about). Except error on my part
With W2 in the down position (1/2 of full scale), the voltage between RESDRV4- and RESDRV4 + is 3 V either 2.1 VRMS.
First question please : in the notice "default drive voltage is approximately 2V RMS". Is this normal ?
* With 5i23 + 7i49 + motor : Numservomac resolver Tamagaya Seiki BRX type : TS2018... 6V
Halscope :
When I turn the shaft, hm2.5i23.0.resolver.00.count and hm2.5i23.0.resolver.00.angle make it possible to obtain curves apparently valid.
Halmeter :
On the other hand, even when I do not turn the shaft, hm2.5i23.0.resolver.00.count "runs" without stopping
Second question please : Is this normal ?
Thank you in advance and excuse my approximate English
Please Log in or Create an account to join the conversation.

13 Jul 2017 18:00 #95766
by PCW
Replied by PCW on topic 5i23 7i49 7i52 8i20
The drive voltages sound about right
The count may have noise but should not drift significantly
Is the resolver error bit set? (it will be set if there is insufficient signal to calculate a valid position)
The count may have noise but should not drift significantly
Is the resolver error bit set? (it will be set if there is insufficient signal to calculate a valid position)
The following user(s) said Thank You: clematites93
Please Log in or Create an account to join the conversation.
- clematites93
- Offline
- Senior Member
-
Less
More
- Posts: 62
- Thank you received: 0
13 Jul 2017 19:17 #95772
by clematites93
Replied by clematites93 on topic 5i23 7i49 7i52 8i20
Hi,
First, thank you for your quick response.
Effectively the resolver error bit is set .
hm2.5i23.0.resolver.00.position.position and hm2.5i23.0.resolver.00.angle seems correct
but for hm2.5i23.0.resolver.00.count --> counting is very important. It does not look like a simple derivative
Detail : the connections between the servo and the 7i49 are very very short !
First, thank you for your quick response.
Effectively the resolver error bit is set .
hm2.5i23.0.resolver.00.position.position and hm2.5i23.0.resolver.00.angle seems correct
but for hm2.5i23.0.resolver.00.count --> counting is very important. It does not look like a simple derivative
Detail : the connections between the servo and the 7i49 are very very short !
Please Log in or Create an account to join the conversation.
13 Jul 2017 23:10 #95778
by PCW
Replied by PCW on topic 5i23 7i49 7i52 8i20
Not sure what you mean by "Effectively the resolver error bit is set ." This is a HAL pin you can check
The count will be noisy as it has 24 bit resolution but the resolver effective number of bits will be 15 or less
so you should expect 512 counts of noise or more
The count will be noisy as it has 24 bit resolution but the resolver effective number of bits will be 15 or less
so you should expect 512 counts of noise or more
The following user(s) said Thank You: clematites93
Please Log in or Create an account to join the conversation.
- clematites93
- Offline
- Senior Member
-
Less
More
- Posts: 62
- Thank you received: 0
14 Jul 2017 16:05 #95795
by clematites93
Replied by clematites93 on topic 5i23 7i49 7i52 8i20
Hi PCW,
thank you again for your explanations. I would like to check if I understood correctly before moving on to other problems.
Hopefully my screenshots are visible enough
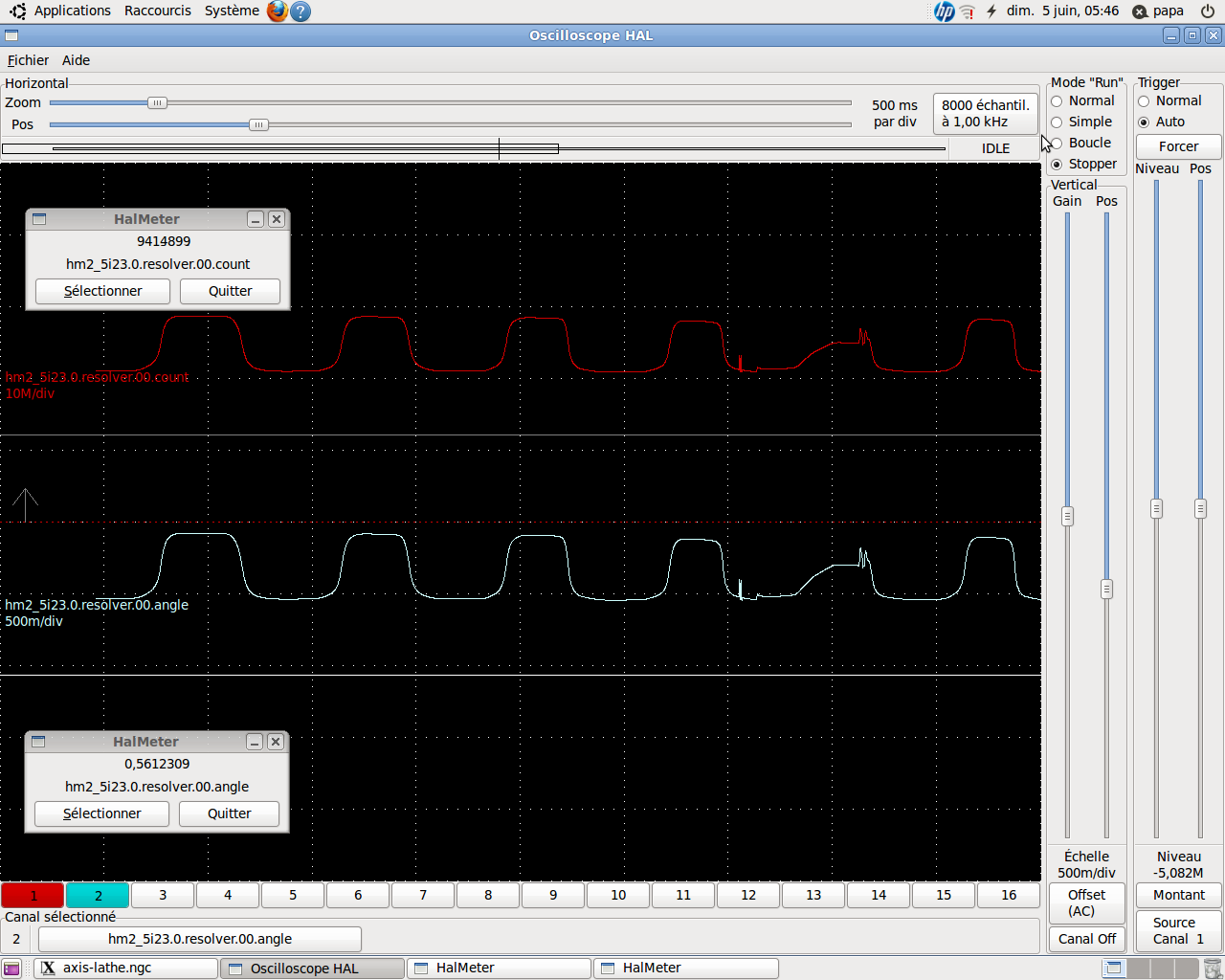
Thus, an angular variation, in one direction and then the other, of a few degrees of the shaft of the servomotor would produce an increase or a decrease of several millions of hm2_5i23.0.resolver.00 count.
On the other hand, a variation of several hundred thousand at rest can be considered as noise which will not interfer, in any appreciable way, on the measuring chain.
First question please : is you agree with this statement (I am not a specialist) ?
In theory a resolver should have infinite precision, but for the model used here (brushless resolver, type BRX), the manufacturer indicates an electrical error (accuracy) of about 10' and a residual voltage 20mV RMS .
Second question : are the values obtained with Halmeter compatible with the manufacturer data?
In addition, a resolver, an analog component, can, especially for the Hal, be considered an ""absolute encoder"".
Third question question please : is it correct ?
thank you again for your explanations. I would like to check if I understood correctly before moving on to other problems.
Hopefully my screenshots are visible enough
Thus, an angular variation, in one direction and then the other, of a few degrees of the shaft of the servomotor would produce an increase or a decrease of several millions of hm2_5i23.0.resolver.00 count.
On the other hand, a variation of several hundred thousand at rest can be considered as noise which will not interfer, in any appreciable way, on the measuring chain.
First question please : is you agree with this statement (I am not a specialist) ?
In theory
a resolver should have infinite precision, but for the model used here (brushless resolver, type BRX), the manufacturer indicates an electrical error (accuracy) of about 10' and a residual voltage 20mV RMS .Second question : are the values obtained with Halmeter compatible with the manufacturer data?
In addition, a resolver, an analog component, can, especially for the Hal, be considered an ""absolute encoder"".
Third question question please : is it correct ?
Please Log in or Create an account to join the conversation.

17 Jul 2017 11:48 #95879
by andypugh
If you are talking about using the resolver as an absolute encoder in the sense that is needed for the HOME_ABSOLUTER_ENCODER option in the INI file, then no it isn't.
It can be made to be a full multi-turn encoder with a bit of HAL trickery, and I am currently experimenting with this on my lathe (but it isn't currently very reliable). I have wondered about modifying the driver to store total counts.
(PCW: I wonder if we could store absolute counts in eeprom somewhere?)
Replied by andypugh on topic 5i23 7i49 7i52 8i20
In addition, a resolver, an analog component, can, especially for the Hal, be considered an ""absolute encoder"".
Third question question please : is it correct ?
If you are talking about using the resolver as an absolute encoder in the sense that is needed for the HOME_ABSOLUTER_ENCODER option in the INI file, then no it isn't.
It can be made to be a full multi-turn encoder with a bit of HAL trickery, and I am currently experimenting with this on my lathe (but it isn't currently very reliable). I have wondered about modifying the driver to store total counts.
(PCW: I wonder if we could store absolute counts in eeprom somewhere?)
The following user(s) said Thank You: clematites93
Please Log in or Create an account to join the conversation.
- clematites93
- Offline
- Senior Member
-
Less
More
- Posts: 62
- Thank you received: 0
18 Jul 2017 20:51 #96021
by clematites93
Replied by clematites93 on topic 5i23 7i49 7i52 8i20
Hi,
your idea seems very interesting, can I have details ? Are you planning to do it with a resolver or an optical encoder.
In order to go further in my tests with the 5i23 with 7i49 and 7i52 do you know if I need a specific firmware or the one that I'm currently using should do the job (rmsvss6_8.bit).
your idea seems very interesting, can I have details ? Are you planning to do it with a resolver or an optical encoder.
In order to go further in my tests with the 5i23 with 7i49 and 7i52 do you know if I need a specific firmware or the one that I'm currently using should do the job (rmsvss6_8.bit).
Please Log in or Create an account to join the conversation.
18 Jul 2017 21:08 #96023
by andypugh
With a resolver.
The theory is that the machine won't move more than half a turn of the motor when powered off, so if you store the machine position at power down you can combine the stored full-turns and the current absolute single-turn position to get an absolute position.
Replied by andypugh on topic 5i23 7i49 7i52 8i20
your idea seems very interesting, can I have details ? Are you planning to do it with a resolver or an optical encoder..
With a resolver.
The theory is that the machine won't move more than half a turn of the motor when powered off, so if you store the machine position at power down you can combine the stored full-turns and the current absolute single-turn position to get an absolute position.
The following user(s) said Thank You: clematites93
Please Log in or Create an account to join the conversation.
- clematites93
- Offline
- Senior Member
-
Less
More
- Posts: 62
- Thank you received: 0
19 Jul 2017 21:23 #96103
by clematites93
Replied by clematites93 on topic 5i23 7i49 7i52 8i20
Thanks for the details.
Do you have any clues for the second question in my last post.
Do you have any clues for the second question in my last post.
Please Log in or Create an account to join the conversation.
19 Jul 2017 22:09 #96106
by PCW
Replied by PCW on topic 5i23 7i49 7i52 8i20
On you HALScope screen shots is the shaft moving back and forth?
If not, something very basic is wrong
is the resolver error bit set?
If not, something very basic is wrong
is the resolver error bit set?
The following user(s) said Thank You: clematites93
Please Log in or Create an account to join the conversation.
Time to create page: 0.094 seconds