Seeking advice about stepper drivers and power choices
- dlv
- Offline
- Junior Member
-

- Posts: 35
- Thank you received: 16
Since this is my first post on the forum, I'll apologize for a long post. However I feel I should add a bit of background. I'm reasonably technically competent (background in EE and a career in software dev) and have a hobby shop equipped with BP mill, 13x40 lathe etc. I very new when it comes to CNC. I'm embarking on my first project; a CNC Plasma table. I've been researching a ton and decided to go the LinuxCNC path over the Masso/Centroid etc. route. I have LinuxCNC running and I'm exploring it with the many wonderful tutorial videos on YT & resources on this forum. I have four linear actuators on order for my XYYZ axis from OpenBuilds with their Nema 23 "high torque" motors (hope I don't regret that) and a Mesa 7i76E board on the way. I plan on fabricating a downdraft table approx 60"x60". I have a Primeweld 60A CNC enabled plasma machine to put on it. I've been keenly looking into Rod's "spaceship" build and a lot of my inspiration for the control is coming from there, including ordering a couple THCAD boards etc. I have much of the needed components for building out the main control box & 24v circuitry on the way.
I have not yet ordered the motor drivers and 48v power supply. A bit stumped by all the choices there and this post is specific to that. The above hopefully gives helpful context for any advice/answers folks might be willing to provide.
I've read a bit of discussion about linear vs. switching supplies with respect to peak load vs. avg load, inrush and regen handling. That said many folks seem to do just fine with a switching PSU. I'm considering going with a 1000W 48v switching PSU which is overkill perhaps for the four 3A motors I'll have but I'm thinking that'll resolve any issues related to peak load. Inrush won't be a problem. Not sure about regen (or if that's even a factor in these smaller motors?). The 1000W pwr supply capacity is also a "future proofing" consideration should I need to upgrade the motors. For around $120 I can get the model KL-1000-48 from Automation Technologies that looks reasonable to me. Any thoughts?
For drivers I don't want to break the bank but don't want to skimp and have issues. Looking at the Gecko G251X. ~$65/ea. The GR214V driver would definitely up the future proofing but at ~$600 for 4 driver boards vs. $260 I'm thinking I'm going over the line there. Anyone think there are other reasons to spend that extra I'm not considering?
Also I'm not looking for any brand wars here but maybe there's other names I should be looking at. I'm not married to Gecko but they tout their micro step morphing capability and, with zero practical experience, it makes a lot of sense to me for a plasma table where I'll need to push my motors well over 600rpm to achieve 200ipm travel rates needed for cutting thinner materials. (assuming the linear actuators I'm getting from Openbuilds will even go there) I've read some to say many/most of the stepper drivers out there support morphing. Is that true? I see drivers online for around $40 but no idea of quality. Generally experience has taught me I should avoid the cheapest options. I want a quality driver that's going to give me good capability and not a bag of frustration and disappointment. The practical experience of others here could be a big help.
Again sorry for the long post. Many thanks in advance for any advice.
Cheers,
-dave
Please Log in or Create an account to join the conversation.
- Michael
- Offline
- Platinum Member
-

- Posts: 335
- Thank you received: 59
As for drives you get what you pay for. I doubt you will find many complaints about gecko. Avoid the off brand stuff. Your instincts seem to be good and on the right track.
For thinner materials you will want to make sure you have a system capable of good acceleration so it minimizes slow down in right corners. Steppers generally accelerate well but make sure you have those settings maxed out in your setup.
Please Log in or Create an account to join the conversation.
- rodw
-

- Offline
- Platinum Member
-
- Posts: 11870
- Thank you received: 4026
I think if you go with Gecko, your choice should be dictated by the voltage you will run your motors at. If you are going to use 48V use the G251X and you will get good results. If you want to run 70 volts or so, go to the G214V
I think it was on Gecko's site I read that the total amperage of the motors can be about 40% higher than the power supply output. You therefore only need about 8.5 amps. I've always used that rule when sizing a power supply.
The Spaceship was originally going to use all NEMA 23s and I had a 7 amp power supply which would have been fine but I then decided to use 2 x NEMA 34's and upgraded to a 10 amp power supply..
I think when you get up to 70 volts, its harder to find a suitable SMPS ( 2 x 36 V SMPS in series is one option) so you see more people use toroid transformers. If you combine these with a AC compatible driver, there is no need for a DC rectification circuit so you get a much more compact layout and fewer failure points. This is where the spaceship is now. 2 x 32 volt torids outputting 64v AC in series (cos that was what I could get) to 3 amp and 6 amp Lam Technologies drivers)
So in summary if you have the budget, go for a 70-72 volt system, otherwise with NEMA 23's 48V is fine.
By way of inspiration, here is a photo of an Ethercat stepper system I am working on at the moment using AC compatible drivers.
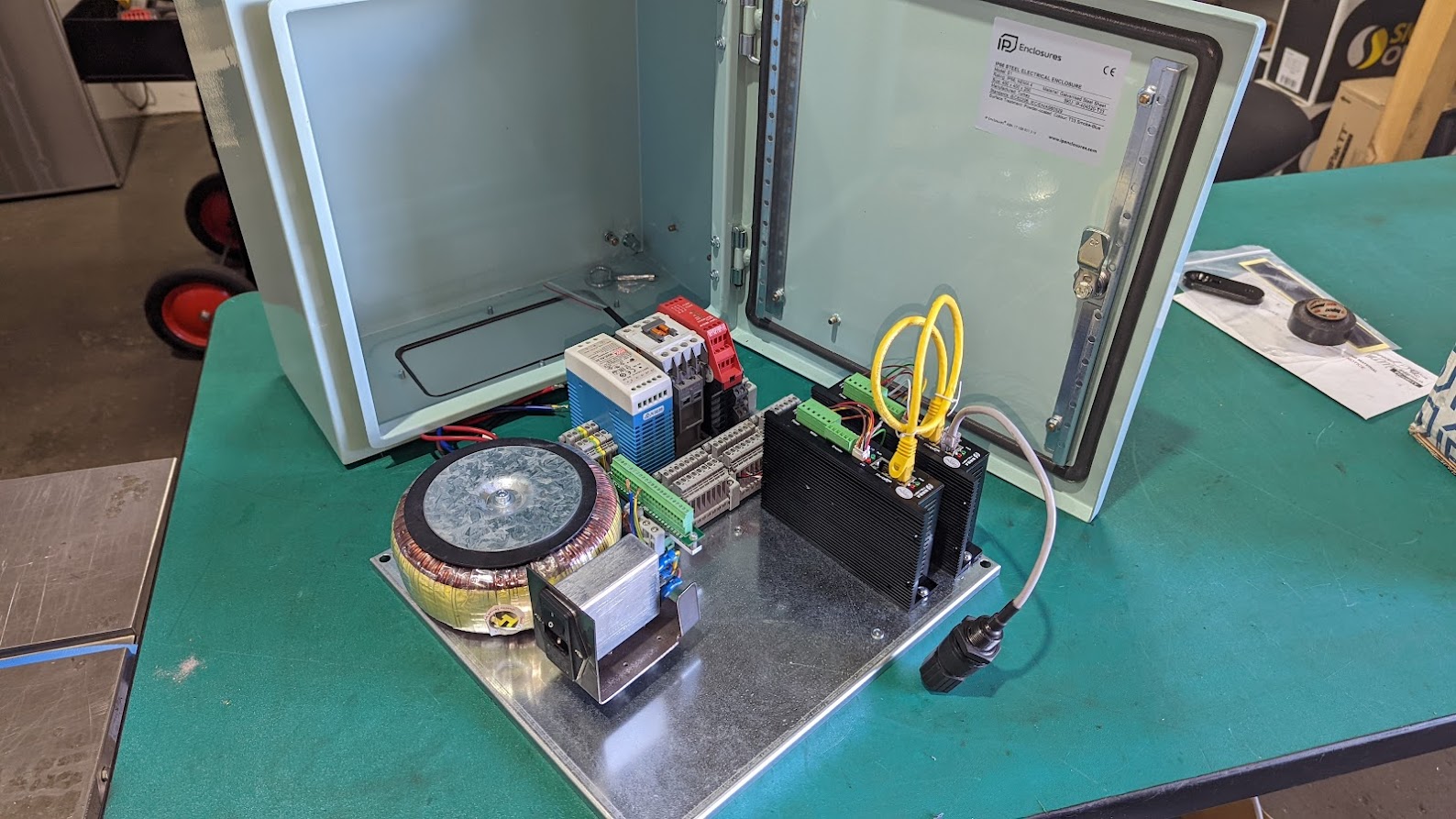
The toroid is one I had custom built 60 volt AC output with 240v and 110v Mains input. The drives can handle 80v AC input. The enclosure is 400mm x 400mm and the base board is 330 x 330mm so its a bit of a challenge to get everyting to fit. I put the toroid on the opposite side of the drivers so it can't heat up the drivers..
Attachments:
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

- Posts: 21514
- Thank you received: 7335
420 Euro/~460$
www.mechapro.de/shop/Schrittmotor-Steuer...t-Endstufe::240.html
600 Euro/~680$
www.mechapro.de/shop/Schrittmotor-Steuer...t-Endstufe::206.html
I used Gecko, still have some, but for the same price LAM are exponentially better.
See if you can find them in US.
Beware that using chinese 3A motors with LAM's set at 3A will very quickly prove terminal for the health of the motors!
LAM have the current value in RMS, not peak.
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
- Posts: 11870
- Thank you received: 4026
Yeh I was going to recommend lam but their distribution in the USA is not good (but a mate in Texas got some). Mine really rock!For 600$ i would skip Gecko and go for these
420 Euro/~460$
www.mechapro.de/shop/Schrittmotor-Steuer...t-Endstufe::240.html
600 Euro/~680$
www.mechapro.de/shop/Schrittmotor-Steuer...t-Endstufe::206.html
I used Gecko, still have some, but for the same price LAM are exponentially better.
See if you can find them in US.
Beware that using chinese 3A motors with LAM's set at 3A will very quickly prove terminal for the health of the motors!
LAM have the current value in RMS, not peak.
Please Log in or Create an account to join the conversation.
- dlv
- Offline
- Junior Member
-
- Posts: 35
- Thank you received: 16
Lam drivers look very nice indeed for the money. Thanks for the links. At a quick glance didn't see any USA distributors. So yeah looks like I'd have to ship from Europe. I kinda jumped into this and in a future rebuild I'd be planing that out more so not a deal breaker. I expect to be messing with this build well into next year. Also perhaps some of this insanity will be over by then and procuring things overseas might be a bit easier (wishful thinking).
It won't be the first time I've ventured into something and along the way learned I'll need to redo it right the second time. I enjoy the process and it is a hobby not a business for me. Keeps me out of trouble in retirement I suppose.
")
Please Log in or Create an account to join the conversation.
- dlv
- Offline
- Junior Member
-
- Posts: 35
- Thank you received: 16
There is no G251 defaults in pncconf so I used the G540 settings. I've read somewhere that the G540 is just 4 G251s in a case.
I do have a motor spinning on axis jog so it seemed to work. :
Also I accidentally had it upside down in wiring so managed to connect PSU +48v to the disable pin and v- to signal GND. Somehow it survived that.
That said there are some issues I have with the Gecko G251:
1) These are unipolar, not differential inputs for step/dir. Full disclosure I should have noticed that in the documentation before I bought it. Unipolar inputs are probably fine but I'd have preferred differential inputs.
2) No heatsink is supplied yet one is required, supposedly only if over 3A motor. I can say it gets very hot with a 3A motor and I can only briefly test. So I've had to order a heatsink big enough for all 4 drives to mount on and can't get on with much more until it arrives.
3) The terminal block is terribly small. 20ga ferrules barely fit in it. I'm using 18ga wire for my power and motor connections, won't fit. Had to tediously trim some strands and stuff it in a 20ga ferrule to connect it up.
4) Current limit is a resistor you have to supply and manage to connect without shorting to the tiny terminal block. Again, should have noticed that in the documentation. Not a deal breaker, I had some 3K resistors on hand but would have been very annoying if not.
5) The trim pot is a super tiny. You better have a jeweler's screwdriver on hand. Finding it twitchy to adjust and low speed vibration is pretty bad.
Botton line; these are tiny. That has some advantages I suppose but I think I'd have preferred to go with a bigger drive in a case with beefier terminals, a heatsink, dip switches for current limit and a better trim pot. YMMV. And one more time, yes I could have figured most of that out just looking at the docs with a bit more scrutiny. But maybe this'll help someone down the road.
Cheers
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
- Posts: 11870
- Thank you received: 4026
I had one of these once but when I needed more, I chose a chinese driver for all the issues you mentioned
Please Log in or Create an account to join the conversation.
- dlv
- Offline
- Junior Member
-
- Posts: 35
- Thank you received: 16
FWIW I found a US distributor for Lam. ParalanI used Gecko, still have some, but for the same price LAM are exponentially better.
See if you can find them in US.
$185 US for a Lam DS1044. Quite expensive but looks very solid and I'm sure well worth it. I especially like that it will signal faults. I have a feeling I'll be upgrading at some point in this project.
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
- Posts: 11870
- Thank you received: 4026
I used Gecko, still have some, but for the same price LAM are exponentially better.
See if you can find them in US.
FWIW I found a US distributor for Lam. Paralan
$185 US for a Lam DS1044. Quite expensive but looks very solid and I'm sure well worth it. I especially like that it will signal faults. I have a feeling I'll be upgrading at some point in this project.
When you do, track me down and I will share my stepboost component that utilises the Lam boost function that reduces current when at constant speed. This allows the motor to cool down so you can push it a lot harder without loosing steps. I reduce to 50% but I'm sure it could be 30%.
Also Look at the DS1073 for your drives. They are rated differently so you would never run a 4 amp motor at 4 amps with lam.
The other trick is to use the A series drives that take AC. This lets you use a toroid transformer without the expense of the rectifier part of the power supply (what I do). The LS Series are identical except they have an open frame and therefore a bit cheaper.
Please Log in or Create an account to join the conversation.