physical start button + pause switch
- SenorAguas
- Offline
- Junior Member
-

Less
More
- Posts: 32
- Thank you received: 0
15 Nov 2016 21:27 - 15 Nov 2016 21:28 #82849
by SenorAguas
physical start button + pause switch was created by SenorAguas
Hi Guys, I've been messing with this a while and am stuck with some of this and2 logic (I think that's my issue).
I'm trying to set up a momentary switch to start the program. I can get this working by itself, although it wants to start the program automatically as soon as its opened. After running it once, the program restarts with the switch.
Also, I have a switch to pause the program if the operator removes the pallet that holds part (this is an automated glue machine). I can get this working by itself.
I can't get them both working at the same time. Here's the error I get: cant do that (EMC_TASK_PLAN_RUN) in auto mode with the interpreter reading. ALso, I get cant do that (EMC_TASK_PLAN_OPEN) in auto mode with the interpreter reading
Can someone help? I thought I halfway understood and2.
Here's my HAL:
I'm trying to set up a momentary switch to start the program. I can get this working by itself, although it wants to start the program automatically as soon as its opened. After running it once, the program restarts with the switch.
Also, I have a switch to pause the program if the operator removes the pallet that holds part (this is an automated glue machine). I can get this working by itself.
I can't get them both working at the same time. Here's the error I get: cant do that (EMC_TASK_PLAN_RUN) in auto mode with the interpreter reading. ALso, I get cant do that (EMC_TASK_PLAN_OPEN) in auto mode with the interpreter reading
Can someone help? I thought I halfway understood and2.
Here's my HAL:
loadrt and2 count=2
addf and2.0 servo-thread
addf and2.1 servo-thread
#pause button
net button_open parport.0.pin-15-in-not => and2.1.in0
net machine-running halui.program.is-running => and2.1.in1
net pause-motion and2.1.out => motion.feed-inhibit
#start button
net program-start-btn halui.mode.auto and2.0.in0 <= parport.0.pin-13-in
net program-run-ok and2.0.in1 <= halui.mode.is-auto
net remote-program-run and2.0.out => halui.program.run
Last edit: 15 Nov 2016 21:28 by SenorAguas. Reason: typo
Please Log in or Create an account to join the conversation.
- SenorAguas
- Offline
- Junior Member
-
Less
More
- Posts: 32
- Thank you received: 0
16 Nov 2016 14:24 #82862
by SenorAguas
Replied by SenorAguas on topic physical start button + pause switch
I scrapped my attempt at the HAL, and went with a piece of code from the thread below (Thanks BigJohnT), but it needs modified for what I'm looking for. I have no need for the step function.
Using this code, my pause switch works and my run switch starts the program, but it only runs 1 line of G code. I'd like it to run the whole program.
So far, I've tried commenting out the step portion, but that made it where I could only start the first line of code and wasn't able to step through after that.
forum.linuxcnc.org/47-hal-examples/13201...-hold-resume-buttons
Using this code, my pause switch works and my run switch starts the program, but it only runs 1 line of G code. I'd like it to run the whole program.
So far, I've tried commenting out the step portion, but that made it where I could only start the first line of code and wasn't able to step through after that.
forum.linuxcnc.org/47-hal-examples/13201...-hold-resume-buttons
loadrt and2 count=4
loadrt or2 count=1
loadrt toggle count=1
loadrt toggle2nist count=1
addf and2.0 servo-thread
addf and2.1 servo-thread
addf and2.2 servo-thread
addf and2.3 servo-thread
addf or2.0 servo-thread
addf toggle.0 servo-thread
addf toggle2nist.0 servo-thread
# External Program Pause/Resume and Run/Step Buttons
# Pause/Resume Section
net pause-resume-btn and2.0.in0 and2.1.in0 <= parport.0.pin-15-in
net pause-on toggle2nist.0.is-on and2.0.in1 and2.3.in1 <= halui.program.is-paused
net run-on and2.1.in1 <= halui.program.is-running
net pause-sig or2.0.in0 <= and2.0.out
net resume-sig or2.0.in1 <= and2.1.out
net toggle-ok toggle.0.in <= or2.0.out
net togglesig toggle2nist.0.in <= toggle.0.out
net toggleon halui.program.pause <= toggle2nist.0.on
net toggleoff halui.program.resume <= toggle2nist.0.off
# Run/Step Section
net run-step-btn and2.2.in0 and2.3.in0 <= parport.0.pin-13-in
net idle-on and2.2.in1 <= halui.program.is-idle
# net pause.on and 2.3.in1 <= halui.program.is-paused
# and2.3.in1 was added in the net pause-on statement in Pause/Resume Section
net run-sig halui.mode.auto halui.program.run <= and2.2.out
net step-sig halui.program.step <= and2.3.outPlease Log in or Create an account to join the conversation.
- rodw
-

- Offline
- Platinum Member
-

Less
More
- Posts: 12041
- Thank you received: 4109
17 Nov 2016 12:52 #82890
by rodw
Replied by rodw on topic physical start button + pause switch
If the code is from this thread
forum.linuxcnc.org/forum/47-hal-examples...p-holdresume-buttons
It says:
Pressing Run/Step while a program is paused will single step the program.
Pressing Hold/Resume while a program is paused will return it to normal run mode.
Sounds like you need to tweak it just a little bit
forum.linuxcnc.org/forum/47-hal-examples...p-holdresume-buttons
It says:
Pressing Run/Step while a program is paused will single step the program.
Pressing Hold/Resume while a program is paused will return it to normal run mode.
Sounds like you need to tweak it just a little bit
Please Log in or Create an account to join the conversation.
- SenorAguas
- Offline
- Junior Member
-
Less
More
- Posts: 32
- Thank you received: 0
17 Nov 2016 15:35 - 17 Nov 2016 15:38 #82904
by SenorAguas
Replied by SenorAguas on topic physical start button + pause switch
Yes, I mapped out the code last night and removed all the and2.3 references thinking that would keep it from stepping. It didn't work. Now it runs 1 step and quits.
here's my map of the code and the portion that I removed:
https://drive.google.com/open?id=0B9dawSNCLhG9ZWd1aGxaQ2hKM3c

here's my map of the code and the portion that I removed:
https://drive.google.com/open?id=0B9dawSNCLhG9ZWd1aGxaQ2hKM3c
Last edit: 17 Nov 2016 15:38 by SenorAguas.
Please Log in or Create an account to join the conversation.
- SenorAguas
- Offline
- Junior Member
-
Less
More
- Posts: 32
- Thank you received: 0
17 Nov 2016 15:48 #82906
by SenorAguas
Replied by SenorAguas on topic physical start button + pause switch
When I follow the map, it seems like it should work. Maybe I screwed up the map?
It will start with the run switch, but only run 1 step. The pause switch will get it going again.
Here's the modified code:
It will start with the run switch, but only run 1 step. The pause switch will get it going again.
Here's the modified code:
loadrt and2 count=3
loadrt or2 count=1
loadrt toggle count=1
loadrt toggle2nist count=1
addf and2.0 servo-thread
addf and2.1 servo-thread
addf and2.2 servo-thread
addf or2.0 servo-thread
addf toggle.0 servo-thread
addf toggle2nist.0 servo-thread
# External Program Pause/Resume and Run/Step Buttons
# Pause/Resume Section
net pause-resume-btn and2.0.in0 and2.1.in0 <= parport.0.pin-15-in
net pause-on toggle2nist.0.is-on and2.0.in1 <= halui.program.is-paused
net run-on and2.1.in1 <= halui.program.is-running
net pause-sig or2.0.in0 <= and2.0.out
net resume-sig or2.0.in1 <= and2.1.out
net toggle-ok toggle.0.in <= or2.0.out
net togglesig toggle2nist.0.in <= toggle.0.out
net toggleon halui.program.pause <= toggle2nist.0.on
net toggleoff halui.program.resume <= toggle2nist.0.off
# Run/Step Section
net run-step-btn and2.2.in0 <= parport.0.pin-13-in
net idle-on and2.2.in1 <= halui.program.is-idle
net run-sig halui.mode.auto halui.program.run <= and2.2.outPlease Log in or Create an account to join the conversation.
- SenorAguas
- Offline
- Junior Member
-
Less
More
- Posts: 32
- Thank you received: 0
17 Nov 2016 20:42 - 17 Nov 2016 20:48 #82926
by SenorAguas
Replied by SenorAguas on topic physical start button + pause switch
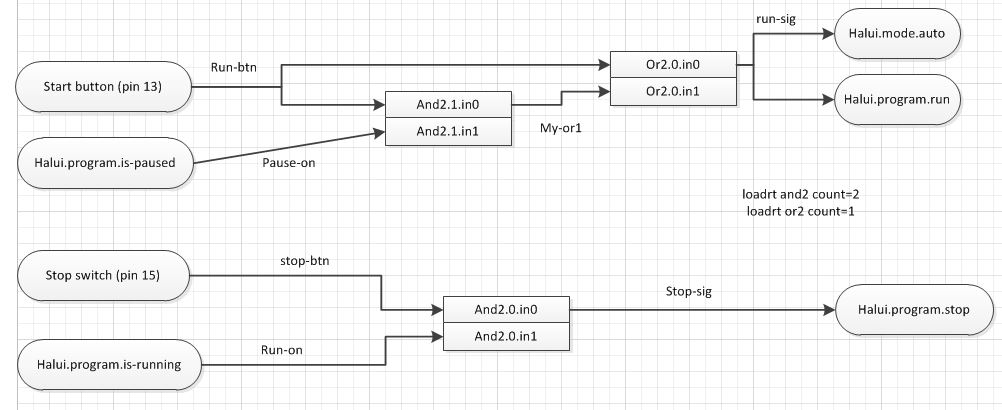
OK, I have it 95% working with the following code, which has gone through about 15 iterations now and is much much different than where I started. The machine is physically doing what I want with the two buttons, but I'm getting error messages whenever hitting the stop switch (which used to be a pause switch). I'm really not sure the difference between pause and stop, but changing it to stop allowed me to restart using the start button.
This is the error: can't do that (EMC_TRAJ_SET_TELEOP_ENABLE) in auto mode with the interpreter idle.
Can someone help me get rid of this error?
Here's the code:
This is the error: can't do that (EMC_TRAJ_SET_TELEOP_ENABLE) in auto mode with the interpreter idle.
Can someone help me get rid of this error?
Here's the code:
loadrt and2 count=2
loadrt or2 count=1
addf and2.0 servo-thread
addf and2.1 servo-thread
addf or2.0 servo-thread
# External Program Pause and Run Buttons
# Run Section
net run-btn or2.0.in0 and2.1.in0 <= parport.0.pin-13-in
net pause-on and2.1.in1 <= halui.program.is-paused
net my-or1 or2.0.in1 <= and2.1.out
net run-sig halui.mode.auto halui.program.run <= or2.0.out
# Stop Section
net stop-btn and2.0.in0 <= parport.0.pin-15-in-not
net run-on and2.0.in1 <= halui.program.is-running
net stop-sig halui.program.stop <= and2.0.out
Last edit: 17 Nov 2016 20:48 by SenorAguas.
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Away
- Platinum Member
-
Less
More
- Posts: 4761
- Thank you received: 1463
17 Nov 2016 20:57 - 17 Nov 2016 21:02 #82929
by Todd Zuercher
Replied by Todd Zuercher on topic physical start button + pause switch
I haven't been following this really closely, but perhaps you are making this more complicated than it needs to be. What happens if you follow the kiss method and do this?You may also want to try it with and with out the halui.mode.auto connection.
net run-btn <= parport.0.pin-13-in => halui.mode.auto => halui.program.run
net stop-btn <= parport.0.pin-15-in => halui.program.stop
Last edit: 17 Nov 2016 21:02 by Todd Zuercher.
Please Log in or Create an account to join the conversation.
- SenorAguas
- Offline
- Junior Member
-
Less
More
- Posts: 32
- Thank you received: 0
17 Nov 2016 22:45 #82935
by SenorAguas
Replied by SenorAguas on topic physical start button + pause switch
Just tried it with and without the auto part of it. It basically worked the same as what I've already got, i.e. it basically did what I wanted it to do, but with an error on the screen:
can't do that (EMC_TRAJ_SET_TELEOP_ENABLE) in auto mode with the interpreter idle
can't do that (EMC_TRAJ_SET_TELEOP_ENABLE) in auto mode with the interpreter idle
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4761
- Thank you received: 1463
18 Nov 2016 03:30 #82945
by Todd Zuercher
Replied by Todd Zuercher on topic physical start button + pause switch
This is a longshot, but you could try this
But I'm not sure this is the real source of the problem. I'll try a few things in a simulation tomorrow.
net run-btn <= parport.0.pin-13-in => halui.mode.teleop => halui.mode.auto => halui.program.run
net stop-btn <= parport.0.pin-15-in => halui.program.stopBut I'm not sure this is the real source of the problem. I'll try a few things in a simulation tomorrow.
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4761
- Thank you received: 1463
18 Nov 2016 15:51 - 18 Nov 2016 16:04 #82964
by Todd Zuercher
Replied by Todd Zuercher on topic physical start button + pause switch
This doesn't give the alarm, but I don't think it should be necessary on a Cartesian machine that doesn't have a joint mode. (seems a little bug like to me.)
The more complecated examples you were grabbing code from (with all the ands, ors...) I believe were trying to make one button do multiple tasks. Such as one button that pressing it when the machine is idle starts a file, press again pauses it, and press again resumes. Which is perfectly fine, just a little harder to configure, getting all the logic and hal commands right. At least this might get you started with something that works.
setp halui.mode.teleop 1
net run-btn <= parport.0.pin-13-in => halui.mode.auto => halui.program.run
net stop-btn <= parport.0.pin-15-in => halui.program.stopThe more complecated examples you were grabbing code from (with all the ands, ors...) I believe were trying to make one button do multiple tasks. Such as one button that pressing it when the machine is idle starts a file, press again pauses it, and press again resumes. Which is perfectly fine, just a little harder to configure, getting all the logic and hal commands right. At least this might get you started with something that works.
Last edit: 18 Nov 2016 16:04 by Todd Zuercher.
The following user(s) said Thank You: SenorAguas
Please Log in or Create an account to join the conversation.
Time to create page: 0.145 seconds