- Configuring LinuxCNC
- Configuration Tools
- PnCConf Wizard
- firmware 5i25,7i85,8i20 brushless servo drive
firmware 5i25,7i85,8i20 brushless servo drive
- johns00056
- Offline
- Premium Member
-

Less
More
- Posts: 114
- Thank you received: 3
05 Mar 2014 04:10 - 05 Mar 2014 05:34 #44412
by johns00056
firmware 5i25,7i85,8i20 brushless servo drive was created by johns00056
I downloaded some firmware, per previous posts on this forum, but I am not seeing the exact combination of boards that I am using. Would someone kindly point me toward the correct firmware, or suggest alternate boards to use on the pncconf wizard.
I am completely new to linux and would like to concentrate my learning efforts in the right direction.
I have a 3 axis mill with brushless servo motors and a MPG. I bought 5i25, 7i85 and 8i20 at the suggestion of the tech guy at Mesa ,over the telephone.
I would like to get one axis working,for now, and worry about the fancy stuff later.
I am completely new to linux and would like to concentrate my learning efforts in the right direction.
I have a 3 axis mill with brushless servo motors and a MPG. I bought 5i25, 7i85 and 8i20 at the suggestion of the tech guy at Mesa ,over the telephone.
I would like to get one axis working,for now, and worry about the fancy stuff later.
Last edit: 05 Mar 2014 05:34 by johns00056.
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-

Less
More
- Posts: 19133
- Thank you received: 5283
05 Mar 2014 07:41 #44421
by PCW
Replied by PCW on topic firmware 5i25,7i85,8i20 brushless servo drive
Its unlikely that pncconf will be able to handle this combination of cards
so you will have to start with an example servo hal file and modify it to suit
so you will have to start with an example servo hal file and modify it to suit
Please Log in or Create an account to join the conversation.
- cmorley
- Offline
- Moderator
-
Less
More
- Posts: 7963
- Thank you received: 2164
05 Mar 2014 12:31 #44423
by cmorley
Replied by cmorley on topic firmware 5i25,7i85,8i20 brushless servo drive
Peter is right PNCconf doesn"t handle the 7i85 yet and I have never tested the support for the 8i20.
Sorry about that.
Chris M
Sorry about that.
Chris M
Please Log in or Create an account to join the conversation.
- johns00056
- Offline
- Premium Member
-
Less
More
- Posts: 114
- Thank you received: 3
05 Mar 2014 20:55 #44436
by johns00056
Replied by johns00056 on topic firmware 5i25,7i85,8i20 brushless servo drive
Thanks for the responses . I will get to work figuring out how to do it manually.
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-
Less
More
- Posts: 23527
- Thank you received: 5005
05 Mar 2014 22:10 #44441
by andypugh
I am using a broadly similar setup (except that all the cards are different, 5i23, 7i49, 7i44). I will post my config when I get home.
Setting up the bldc component to commutate properly will be a good part of the effort. You probably want to set the motors up disconnected and make them run smoothly at the same speed in both directions first.
Do the motors have hall sensors?
Replied by andypugh on topic firmware 5i25,7i85,8i20 brushless servo drive
Thanks for the responses . I will get to work figuring out how to do it manually.
I am using a broadly similar setup (except that all the cards are different, 5i23, 7i49, 7i44). I will post my config when I get home.
Setting up the bldc component to commutate properly will be a good part of the effort. You probably want to set the motors up disconnected and make them run smoothly at the same speed in both directions first.
Do the motors have hall sensors?
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Offline
- Platinum Member
-

Less
More
- Posts: 5034
- Thank you received: 1467
06 Mar 2014 11:14 #44475
by Todd Zuercher
Replied by Todd Zuercher on topic firmware 5i25,7i85,8i20 brushless servo drive
I am surprised that it is not supported. I am pretty sure I used PNC config to start the setup for my 7i85S configuration, but it is a slightly different animal.
Please Log in or Create an account to join the conversation.
- johns00056
- Offline
- Premium Member
-
Less
More
- Posts: 114
- Thank you received: 3
06 Mar 2014 20:45 #44494
by johns00056
Replied by johns00056 on topic firmware 5i25,7i85,8i20 brushless servo drive
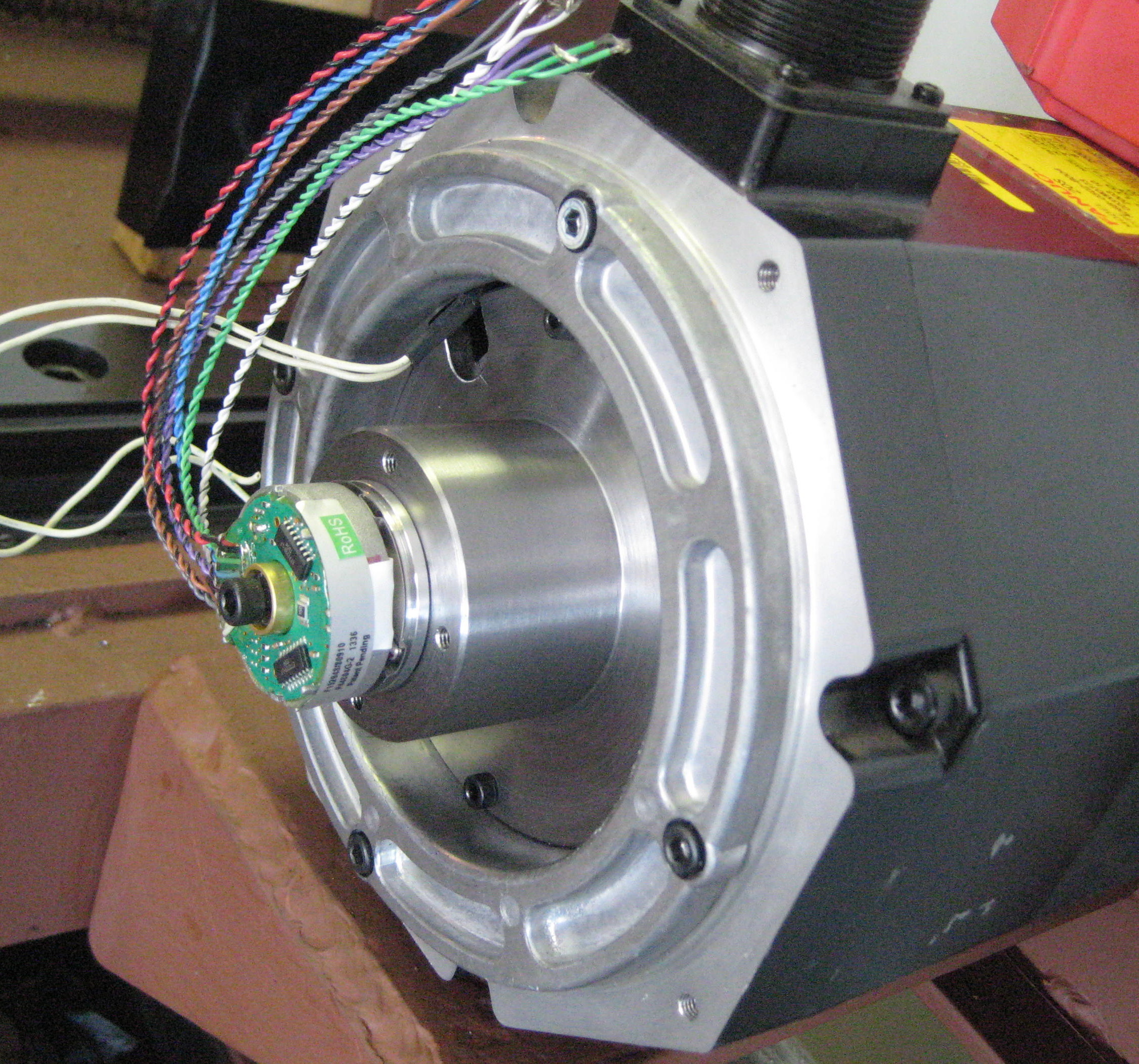
The encoder has commutation channel for an 8 pole motor. I replaced the original Fanuc encoder with a Danaher, Dynapar series f15 2048 ppr. and index pulse. It cost about $210.00. I only bought one. If it works I will get 2 more.
I did see a video, on the enc- users- request e-mail list , of someone using a standard fanuc encoder but I have no idea of how they did it.
I did see a video, on the enc- users- request e-mail list , of someone using a standard fanuc encoder but I have no idea of how they did it.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 23527
- Thank you received: 5005
06 Mar 2014 21:11 #44496
by andypugh
The 8i20 takes a rotor angle and a current value from LinuxCNC. These numbers need to be calculated by the bldc HAL component.
www.linuxcnc.org/docs/html/man/man9/bldc.9.html
Ideally bldc will use the encoder feedback to give smooth, sinusoidal commutation, but it can't do that without a startup position reference. It can get this in a number of ways.
If you look at the documentation above you will see that "bldc" can accept either conventional Hall signals, or the special 4-channel Fanuc system.
So, you should be able to use the original Fanuc encoders and save some money.
If the Fanuc encoders are not the 4-wire Gray-code commutation system then you may still be able to use them. Mesa have FPGA code that understands some of the Fanuc serial encoders, and I think it is possible to configure (with special firmware) a 7i74 board to hve 4 x Smart-Serial ports for the 8i20 and 4 x Fanuc Serial ports.
Replied by andypugh on topic firmware 5i25,7i85,8i20 brushless servo drive
The encoder has commutation channel for an 8 pole motor. I replaced the original Fanuc encoder with a Danaher, Dynapar series f15 2048 ppr. and index pulse. It cost about $210.00. I only bought one. If it works I will get 2 more.
I did see a video, on the enc- users- request e-mail list , of someone using a standard fanuc encoder but I have no idea of how they did it.
The 8i20 takes a rotor angle and a current value from LinuxCNC. These numbers need to be calculated by the bldc HAL component.
www.linuxcnc.org/docs/html/man/man9/bldc.9.html
Ideally bldc will use the encoder feedback to give smooth, sinusoidal commutation, but it can't do that without a startup position reference. It can get this in a number of ways.
If you look at the documentation above you will see that "bldc" can accept either conventional Hall signals, or the special 4-channel Fanuc system.
So, you should be able to use the original Fanuc encoders and save some money.
If the Fanuc encoders are not the 4-wire Gray-code commutation system then you may still be able to use them. Mesa have FPGA code that understands some of the Fanuc serial encoders, and I think it is possible to configure (with special firmware) a 7i74 board to hve 4 x Smart-Serial ports for the 8i20 and 4 x Fanuc Serial ports.
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 19133
- Thank you received: 5283
07 Mar 2014 01:11 #44508
by PCW
Replied by PCW on topic firmware 5i25,7i85,8i20 brushless servo drive
AFAIK there are at least 4 types of Fanuc encoders:
1. Incremental quadrature
2. Absolute quadrature
3. Incremental serial (Ai64 for example)
4. Absolute serial (Aa64,Aa1000 for example)
Type 1 is a standard quadrature encoder, the only non standard thing is that they use a 4 bit absolute position code instead of the more common 3 bit Hall signals
Type 2 is the same as type 1 except that it has a request pin that causes the encoder to send the absolute position (in quadrature) when pulsed (these require a backup battery to retain the absolute position information)
Type 3 is a serial encoder that sends absolute position as a serial bitstream when requested by the host.
the absolute position is volatile so lost when power is removed and so not valid until an index has been detected.
Type 4 is like type 3 but has the absolute position stored in battery backed memory so does not forget position when main power is removed. Surprisingly these encoders keep count on battery power even if moved when main power is off.
Both type 3 and type 4 encoder have a 10 bit absolute commutation track that does
not depend on main or battery power (its always valid)
I'm pretty sure all types can be supported but the interface hardware and firmware differs based on encoder type. Quadrature types use standard differential quadrature interfaces, serial types use a RS-422 interface (7I85,7I74 etc). The serial encoders need the FAbs firmware module and this is only supported in LinuxCNC master. As Andy mentioned, his BLDC comp can use the Fanuc type commutation signals
from the Fanuc quadrature encoders for commutation startup.
1. Incremental quadrature
2. Absolute quadrature
3. Incremental serial (Ai64 for example)
4. Absolute serial (Aa64,Aa1000 for example)
Type 1 is a standard quadrature encoder, the only non standard thing is that they use a 4 bit absolute position code instead of the more common 3 bit Hall signals
Type 2 is the same as type 1 except that it has a request pin that causes the encoder to send the absolute position (in quadrature) when pulsed (these require a backup battery to retain the absolute position information)
Type 3 is a serial encoder that sends absolute position as a serial bitstream when requested by the host.
the absolute position is volatile so lost when power is removed and so not valid until an index has been detected.
Type 4 is like type 3 but has the absolute position stored in battery backed memory so does not forget position when main power is removed. Surprisingly these encoders keep count on battery power even if moved when main power is off.
Both type 3 and type 4 encoder have a 10 bit absolute commutation track that does
not depend on main or battery power (its always valid)
I'm pretty sure all types can be supported but the interface hardware and firmware differs based on encoder type. Quadrature types use standard differential quadrature interfaces, serial types use a RS-422 interface (7I85,7I74 etc). The serial encoders need the FAbs firmware module and this is only supported in LinuxCNC master. As Andy mentioned, his BLDC comp can use the Fanuc type commutation signals
from the Fanuc quadrature encoders for commutation startup.
Please Log in or Create an account to join the conversation.
- johns00056
- Offline
- Premium Member
-
Less
More
- Posts: 114
- Thank you received: 3
07 Mar 2014 03:48 #44511
by johns00056
Replied by johns00056 on topic firmware 5i25,7i85,8i20 brushless servo drive
I think that it would be way too complicated for me to try and use the Fanuc encoders. I can"t even figure out how to use the ini file that PCW kindly sent me, in another thread.
I did use one of Pico Systems Fanuc encoder converters to run one of the motors on the bench , But that was three years ago and it seems that I have forgotten everything that I learned about linux at that time.
I did use one of Pico Systems Fanuc encoder converters to run one of the motors on the bench , But that was three years ago and it seems that I have forgotten everything that I learned about linux at that time.
Please Log in or Create an account to join the conversation.
Moderators: cmorley
- Configuring LinuxCNC
- Configuration Tools
- PnCConf Wizard
- firmware 5i25,7i85,8i20 brushless servo drive
Time to create page: 0.105 seconds