Hello everyone,
Yesterday, I managed to blow up two Mesa boards within just a few minutes, and I’m still not sure why it happened or how to avoid this in the future.
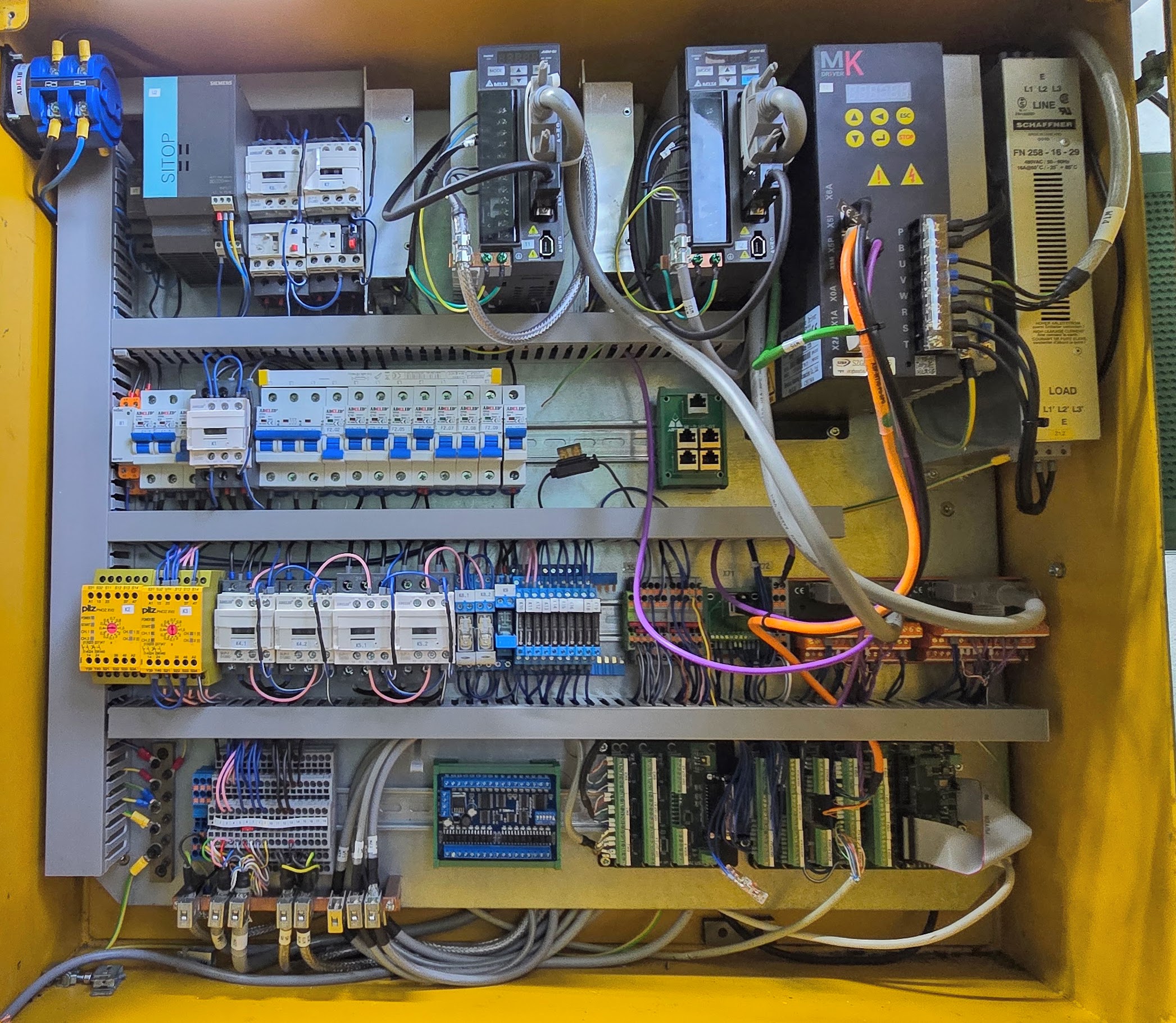
The machine is a retrofitted Schaublin 125CNC lathe, which had been running flawlessly—until last Friday’s coffee break. When I came back, I found the central lubrication pump had burned out, apparently because it had been running continuously.
I discovered that output 6 and output 7 were permanently high as soon as the card was powered up. These outputs are connected to 400V 3-phase contactors (for the lubrication and coolant pumps), each with a 24V coil and a flyback diode directly across the coil. Each contactor draws about 275 mA.
I’m not sure which output failed first—or whether both failed at the same time. The coolant pump is already configured in HAL but hasn’t yet been wired to its contactor, so I can only confirm that the lubrication pump was not being controlled by LinuxCNC at all—it isn’t connected in HAL.
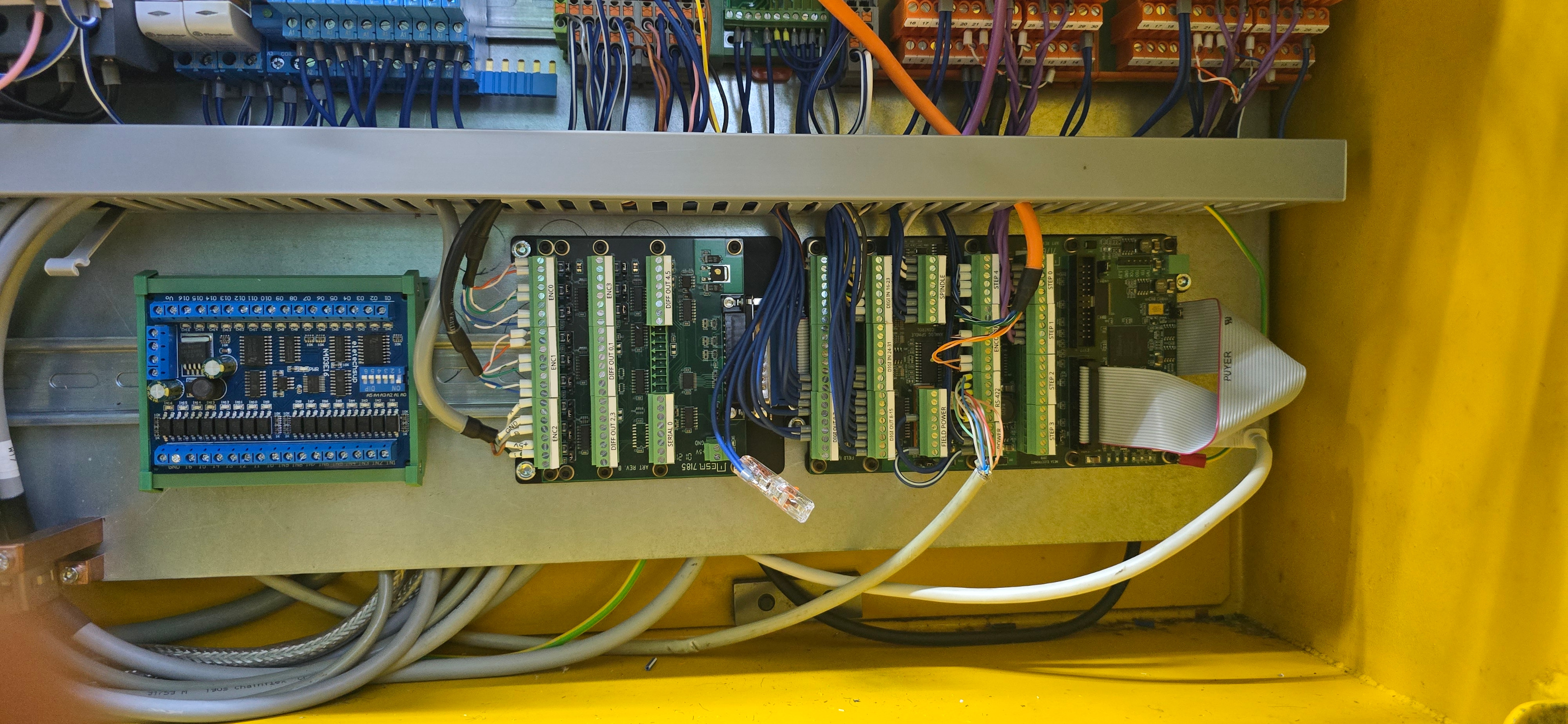
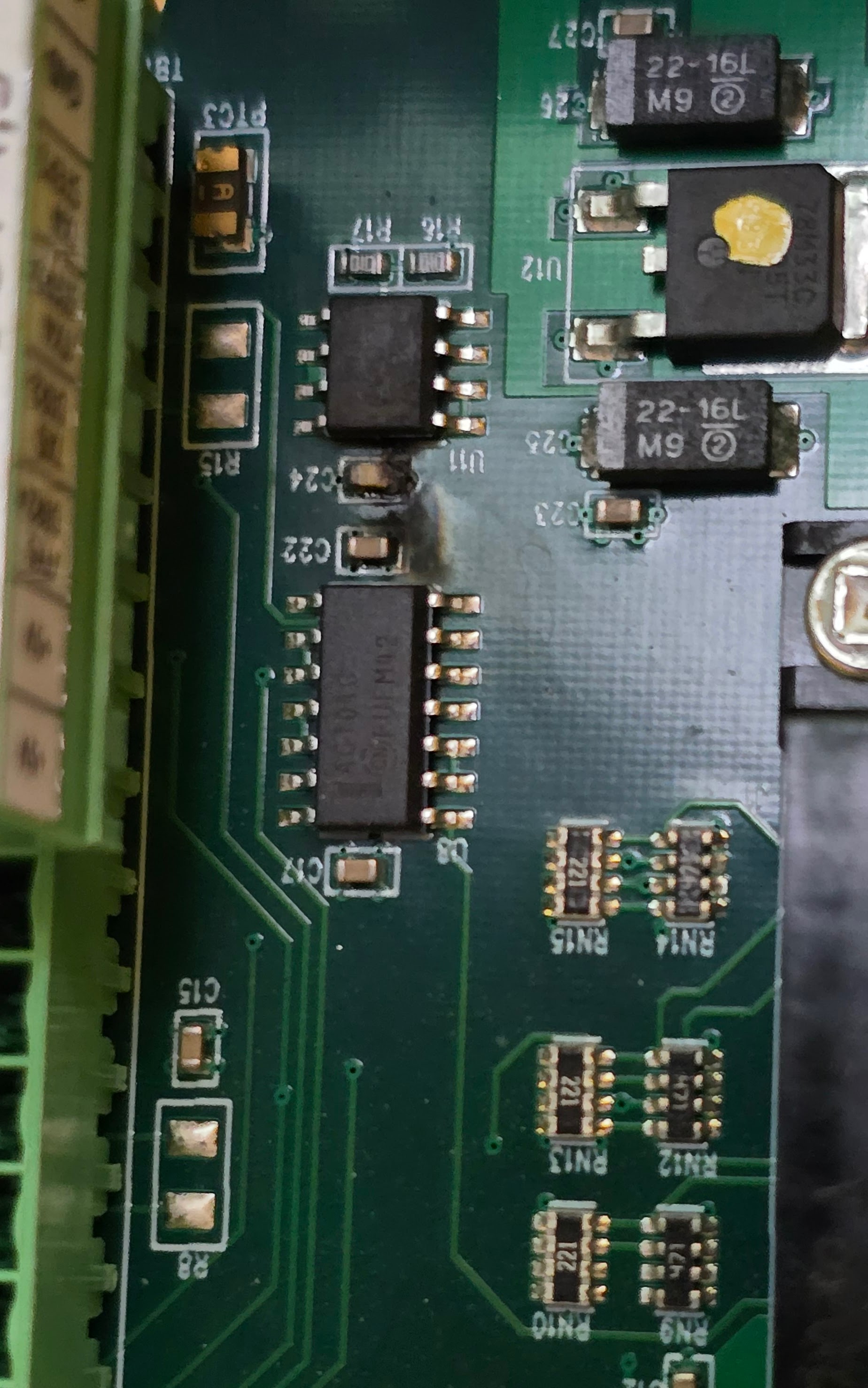
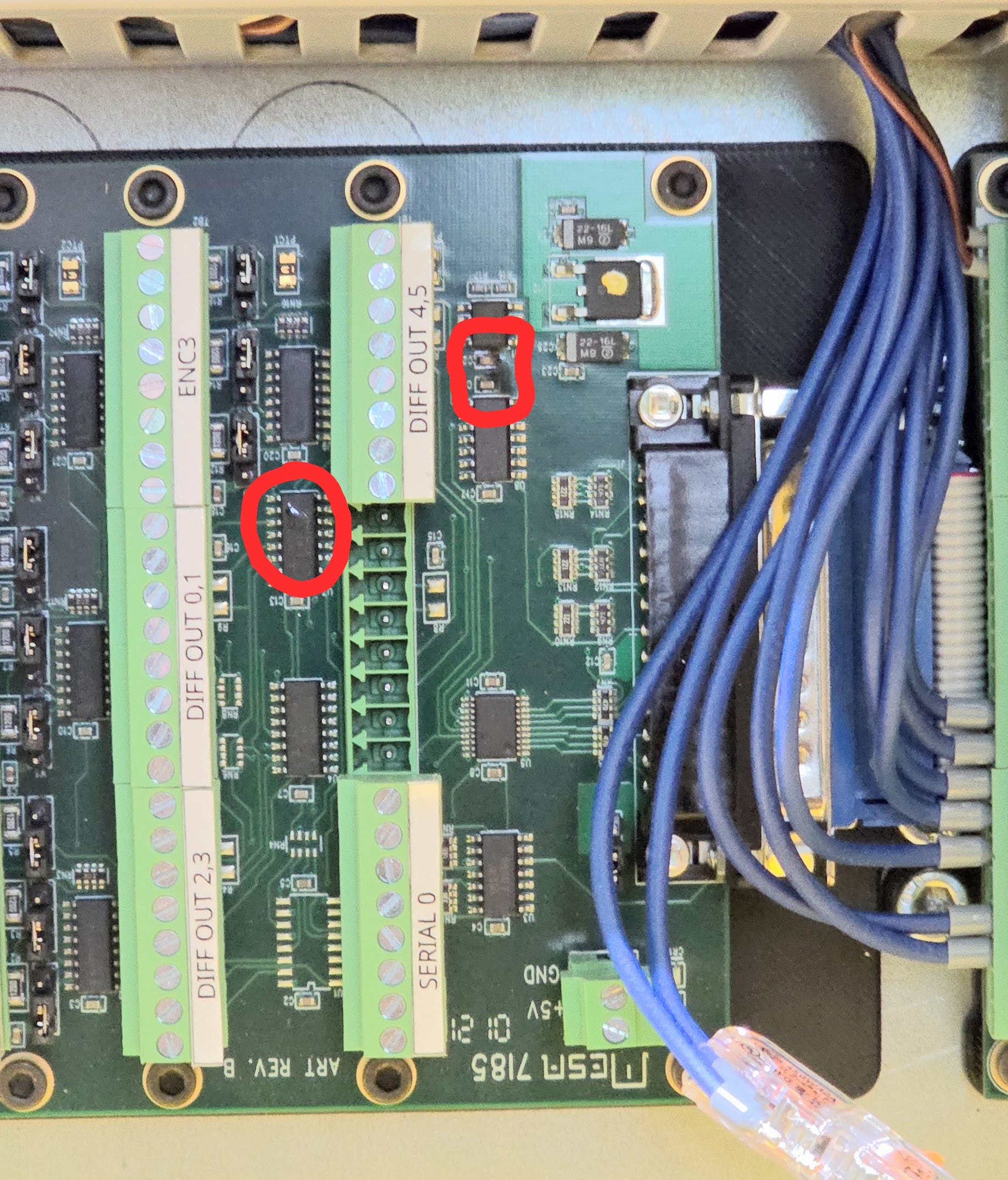
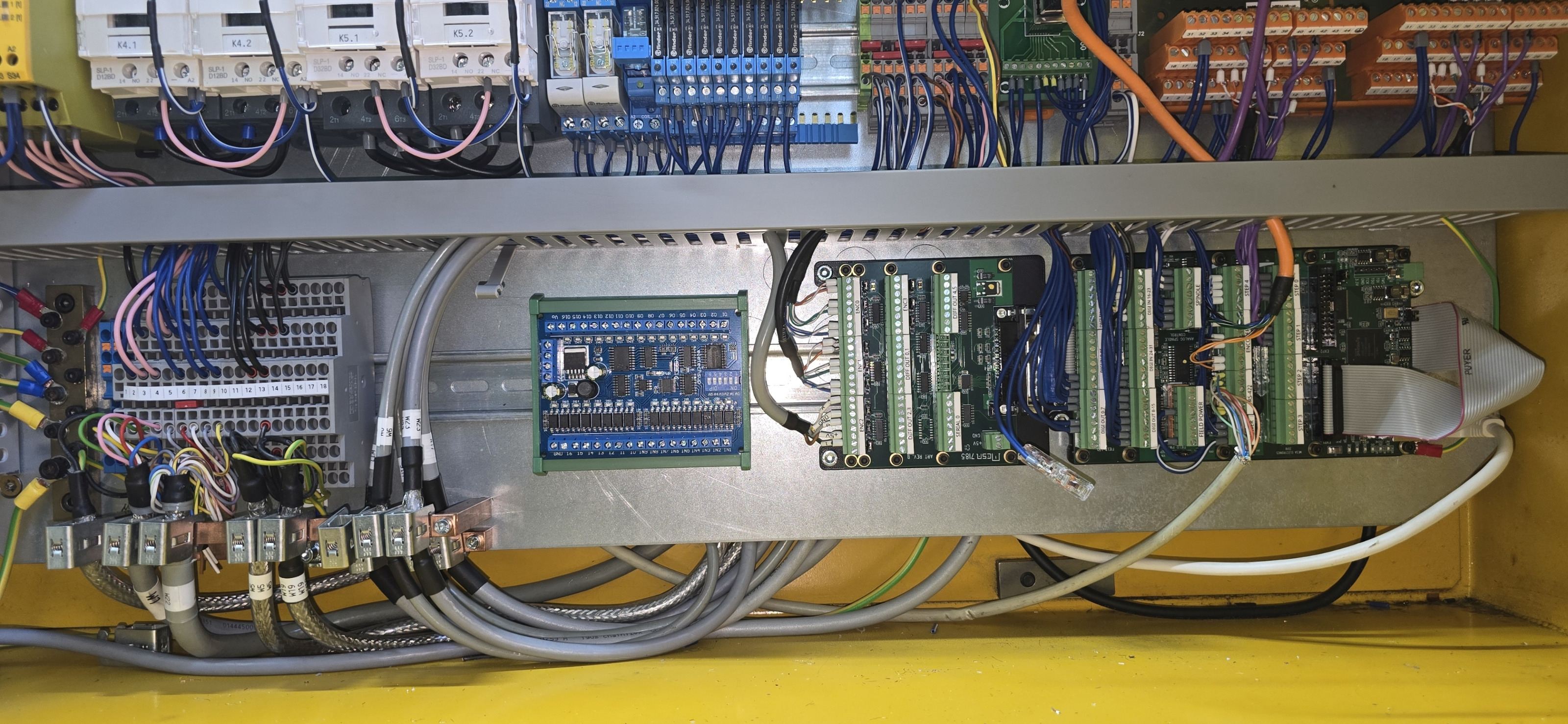
After powering down the machine and disconnecting the wire between the lubrication pump’s contactor and output 6, I turned the power back on. While sitting in front of the control cabinet and moving some wires around, I saw smoke coming from the 7i85S board next to the 7i76E. It appears that capacitors C22 and C24 have blown, and one IC also looks suspicious.
I’m only using the encoder inputs of the 7i85S, and those still seem to be functional. I suspect that one of the unconnected step/dir outputs may have been damaged.
While I can accept that switching contactors directly might not have been ideal (even if within spec), I don’t understand what could have caused the damage on the 7i85S—especially since nothing was connected to any of its outputs.
During my investigation, I also realized that I had used the VIN pin on the field power connector instead of pins 1, 2, 3, or 4—so field power was supplied through the internal jumper. Could that have caused issues?
By the way, this part of Norbert’s
connection sheet
(page 2) may be a bit misleading or unclear in that regard.
Both boards are still working, aside from the two damaged outputs and possibly one or more differential outputs on the 7i85S. Also worth noting: the 24V supply to the cards is not switched on the DC side; the PSU is switched on the AC side.
Should I replace the boards anyway, or are they still safe to use going forward?
Thanks in advance for any help or insights!
— Max