Analog DC servo very big response delay
- Glite
- Offline
- Junior Member
-

Less
More
- Posts: 38
- Thank you received: 8
30 Oct 2019 11:14 #149149
by Glite
Analog DC servo very big response delay was created by Glite
Hi to all,
I have done a retrofit of Mikron WF31CH running Bosch TR-10 230 amplifier and Siemens DC brushed servos 1HU 3070-0AF for X, Y axes and 1HU 3073-0AF.
This drive looks like have a very big delay in input command processing, despite being analog:
Drive manual: www.dropbox.com/sh/8owpaoax31ehf2x/AACji...older_nav_tracking=1
Is there any possibility to fix this? I have found in manual that drive has analog input low pass filter of 11.2 Ohms and 100 nF, which gives time constant of 1.12 ms and cuttoff frequency of 142 Hz. I'm thinking that it's possible to use smaller capacitor to change this, but I'm not sure that this will help much.
Also there is an option to exchange drive to microprocessor based with 8 KHz PWM, speed regulation of 1:10000 and 14 bit ADC, but drive developers can't give exact answer whether this situation will happen too, only experiment can help. I'm having same doubts as them, due to nature of brushed DC servos and DC tachos.
Have anyone encountered similar problem? I know there is a way to exchange with modern digital servos and PMSM motors which will give much better results, but this way is rather expensive.
Thanks!
I have done a retrofit of Mikron WF31CH running Bosch TR-10 230 amplifier and Siemens DC brushed servos 1HU 3070-0AF for X, Y axes and 1HU 3073-0AF.
This drive looks like have a very big delay in input command processing, despite being analog:
Drive manual: www.dropbox.com/sh/8owpaoax31ehf2x/AACji...older_nav_tracking=1
Is there any possibility to fix this? I have found in manual that drive has analog input low pass filter of 11.2 Ohms and 100 nF, which gives time constant of 1.12 ms and cuttoff frequency of 142 Hz. I'm thinking that it's possible to use smaller capacitor to change this, but I'm not sure that this will help much.
Also there is an option to exchange drive to microprocessor based with 8 KHz PWM, speed regulation of 1:10000 and 14 bit ADC, but drive developers can't give exact answer whether this situation will happen too, only experiment can help. I'm having same doubts as them, due to nature of brushed DC servos and DC tachos.
Have anyone encountered similar problem? I know there is a way to exchange with modern digital servos and PMSM motors which will give much better results, but this way is rather expensive.
Thanks!
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17996
- Thank you received: 5283
30 Oct 2019 14:27 #149177
by PCW
Replied by PCW on topic Analog DC servo very big response delay
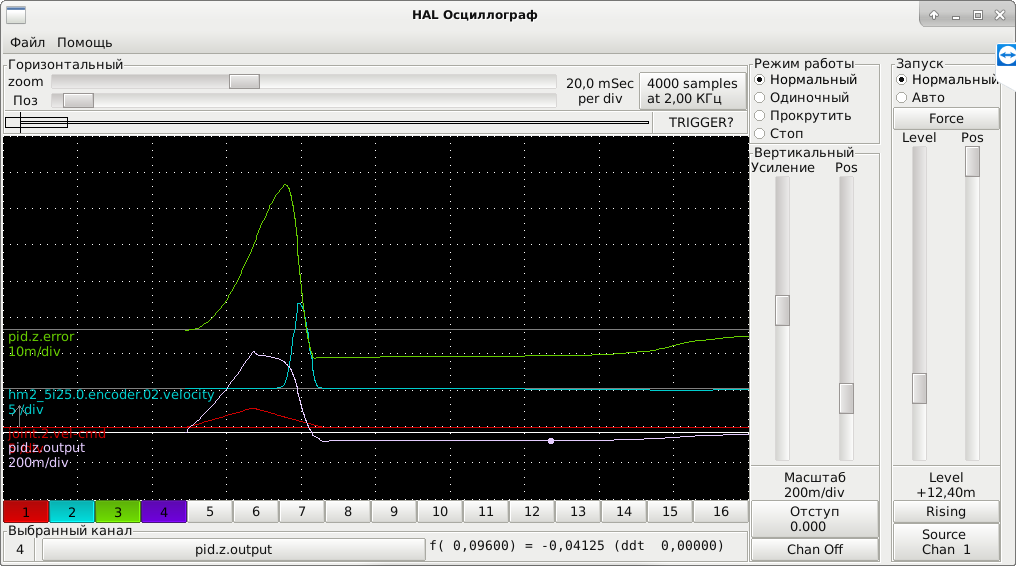
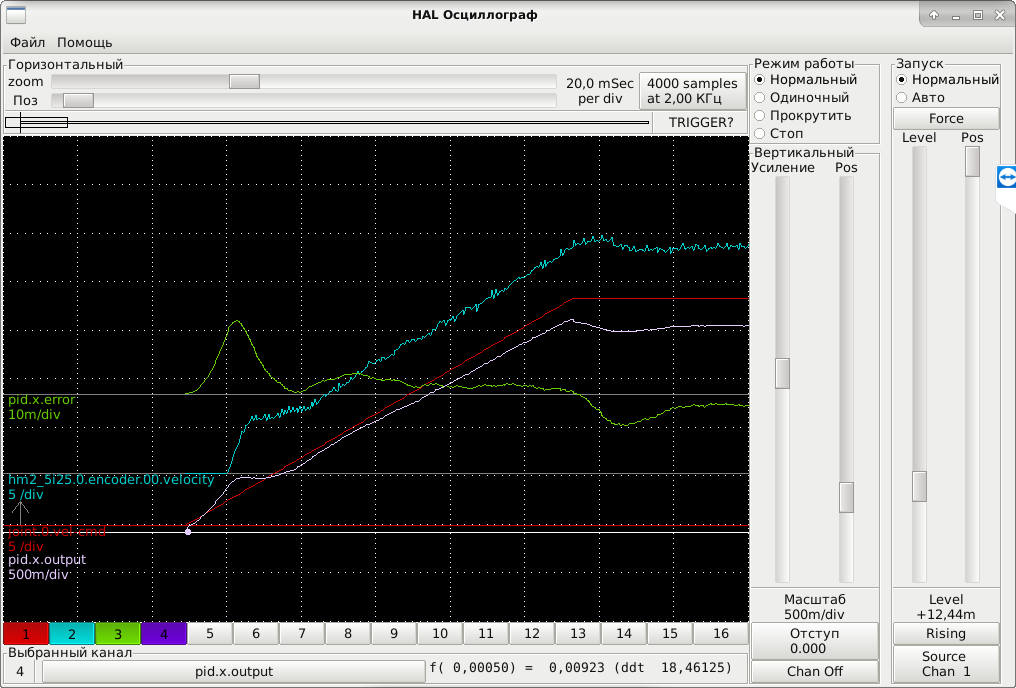
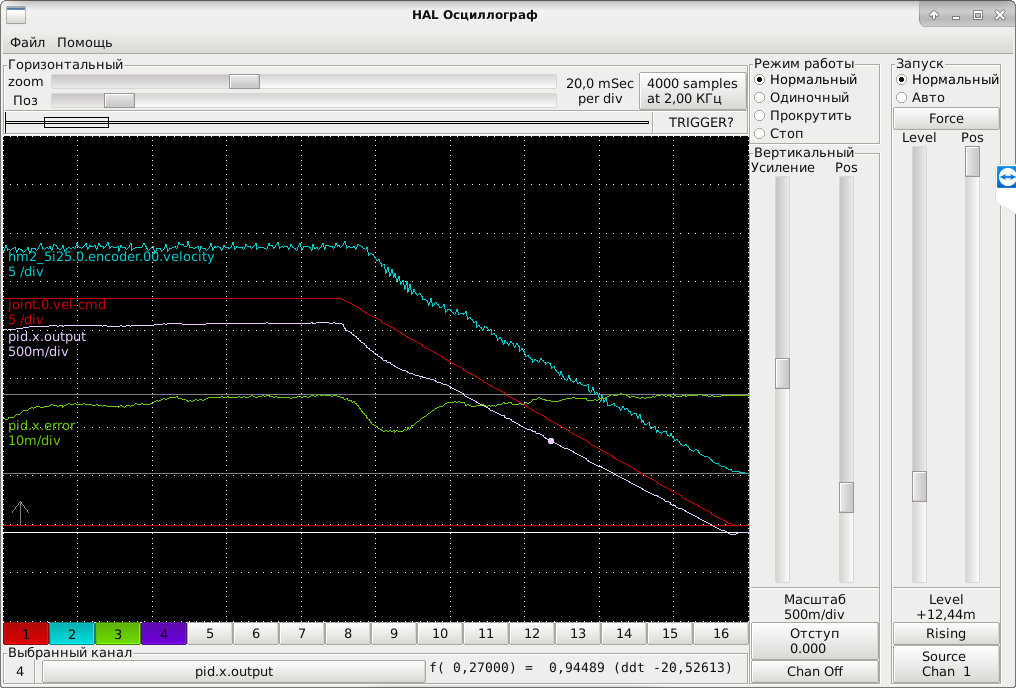
Have you tuned your drives velocity loop? The nearly 10 ms delay from velocity command to actual motion seems a bit more like stiction combined with low velocity gain than drive bandwidth.
Please Log in or Create an account to join the conversation.
- Glite
- Offline
- Junior Member
-
Less
More
- Posts: 38
- Thank you received: 8
30 Oct 2019 14:41 #149178
by Glite
Replied by Glite on topic Analog DC servo very big response delay
Tuning of this drive is a bit complicated, because it requires soldering capacitors and resistors somewhere on regulator board. It was pretuned for this motors on factory.
It does look like low servo gains on image with Z axis movement, when it tries to move back from overshoot, that takes almost 80 ms.
It does look like low servo gains on image with Z axis movement, when it tries to move back from overshoot, that takes almost 80 ms.
Please Log in or Create an account to join the conversation.
- Glite
- Offline
- Junior Member
-
Less
More
- Posts: 38
- Thank you received: 8
30 Oct 2019 16:28 #149185
by Glite
Replied by Glite on topic Analog DC servo very big response delay
Looks like I need to find somewhere a RC decade box for the tuning. Once I get it I will comeback with updates.
Please Log in or Create an account to join the conversation.
- gaston48
- Offline
- Premium Member
-

Less
More
- Posts: 112
- Thank you received: 5
30 Oct 2019 16:48 #149191
by gaston48
Replied by gaston48 on topic Analog DC servo very big response delay
Hello,
have you tuned the parameter FF1 ?
have you tuned the parameter FF1 ?
Please Log in or Create an account to join the conversation.
- Glite
- Offline
- Junior Member
-
Less
More
- Posts: 38
- Thank you received: 8
30 Oct 2019 16:49 #149192
by Glite
Replied by Glite on topic Analog DC servo very big response delay
Sure, cruise ferror is close to 1-2 microns.
Please Log in or Create an account to join the conversation.
- Glite
- Offline
- Junior Member
-
Less
More
- Posts: 38
- Thank you received: 8
09 Nov 2019 19:41 #150004
by Glite
Replied by Glite on topic Analog DC servo very big response delay
Hi again, I've got a time to get to the machine, but results are a bit disappointing.
Speed and current regulator inside the drive are pretty well tuned, increasing proportional gain for speed regulator, makes things only worse, changing integration term doesn't change much. I exchanged existing 220 nF capacitor with 100 nF, and it didn't change the delay.
Changing 100 nF filter capacitor with 22 nF haven't changed much too, but I still left it as it didn't made things worse.
Looks like the main problem with this machine and similar to it is static friction, even when using anti stiction lubes. I'm not sure that even exchanging with modern PMSM drives can solve this somehow.
Still question is open, whether something can be done with this machine.
Speed and current regulator inside the drive are pretty well tuned, increasing proportional gain for speed regulator, makes things only worse, changing integration term doesn't change much. I exchanged existing 220 nF capacitor with 100 nF, and it didn't change the delay.
Changing 100 nF filter capacitor with 22 nF haven't changed much too, but I still left it as it didn't made things worse.
Looks like the main problem with this machine and similar to it is static friction, even when using anti stiction lubes. I'm not sure that even exchanging with modern PMSM drives can solve this somehow.
Still question is open, whether something can be done with this machine.
Please Log in or Create an account to join the conversation.
- Glite
- Offline
- Junior Member
-
Less
More
- Posts: 38
- Thank you received: 8
11 Nov 2019 13:44 - 11 Nov 2019 16:58 #150110
by Glite
Replied by Glite on topic Analog DC servo very big response delay
Could someone please add FF3 for the jerk feedforward to the PID component in master branch? PCW mentioned that this could help in some thread, I would like to make a test of it.
Last edit: 11 Nov 2019 16:58 by Glite.
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-
Less
More
- Posts: 19886
- Thank you received: 4645
12 Nov 2019 13:34 #150193
by andypugh
Replied by andypugh on topic Analog DC servo very big response delay
There isn't much advantage in having jerk feedforward in the PID unless the motion controller has a matching output. That is likely to be the bigger part of the work required.
Maybe you could experiment with velocity-dependent P-gain? The "lincurve" component was designed with this sort of thing in mind.
Maybe you could experiment with velocity-dependent P-gain? The "lincurve" component was designed with this sort of thing in mind.
Please Log in or Create an account to join the conversation.
- Glite
- Offline
- Junior Member
-
Less
More
- Posts: 38
- Thank you received: 8
12 Nov 2019 14:26 - 12 Nov 2019 14:41 #150203
by Glite
Replied by Glite on topic Analog DC servo very big response delay
I did a quick modification to PID component in servo sim to add this jerk derivative.
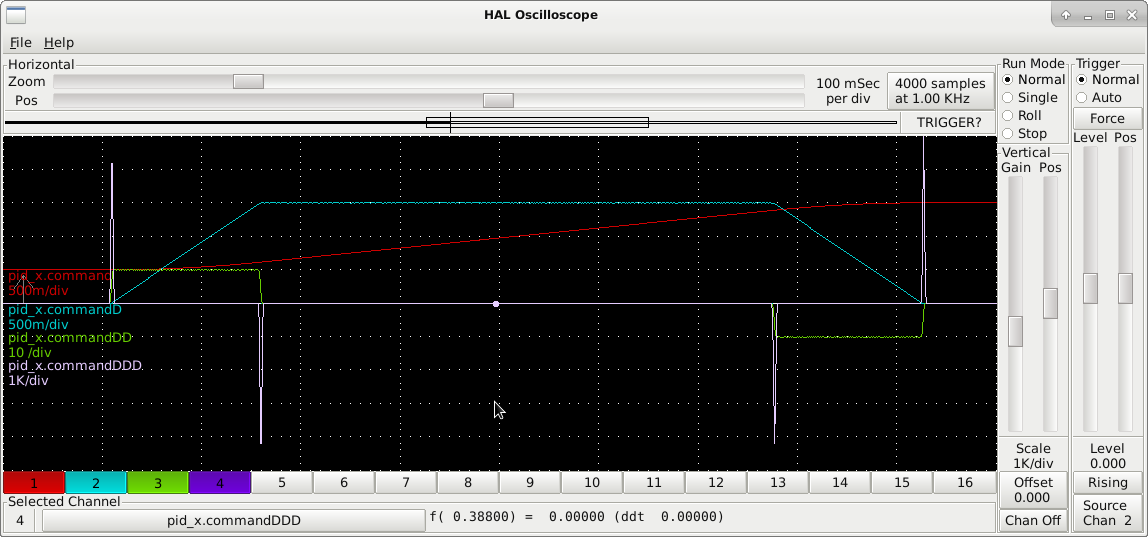
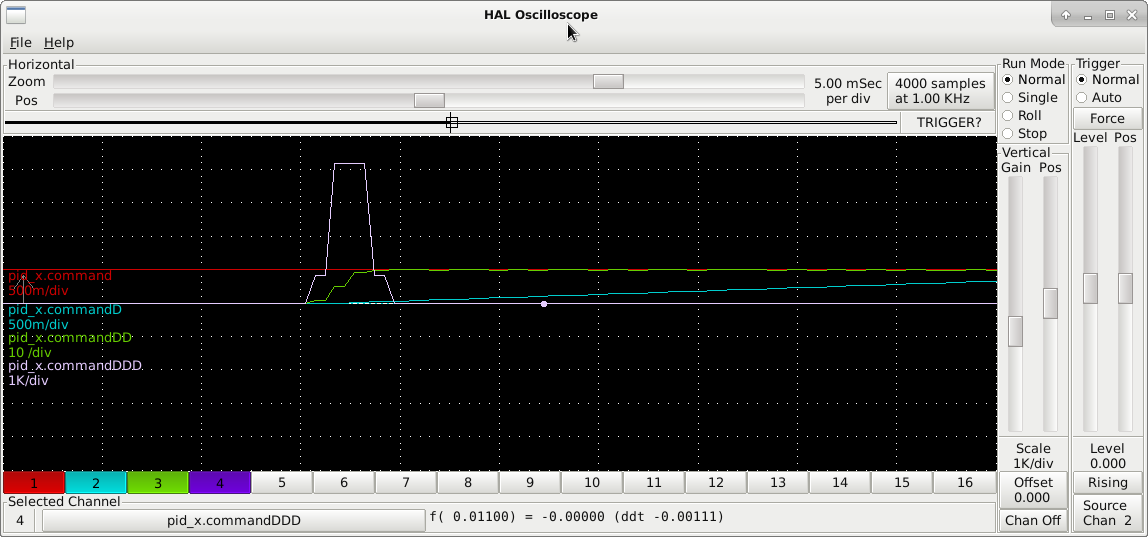
I will try to give it a go, as it possibly could remove some overshoots at movement phase 2 and 3(end of acceleration, start of deceleration) too, not only undershoot at start. But there is some overshoot at the end of move, and lincurve may help there.
I will try to give it a go, as it possibly could remove some overshoots at movement phase 2 and 3(end of acceleration, start of deceleration) too, not only undershoot at start. But there is some overshoot at the end of move, and lincurve may help there.
Last edit: 12 Nov 2019 14:41 by Glite.
Please Log in or Create an account to join the conversation.
Time to create page: 0.868 seconds