Arduino based USB Pendant for Linuxcnc
- anda
- Offline
- New Member
-

- Posts: 2
- Thank you received: 0
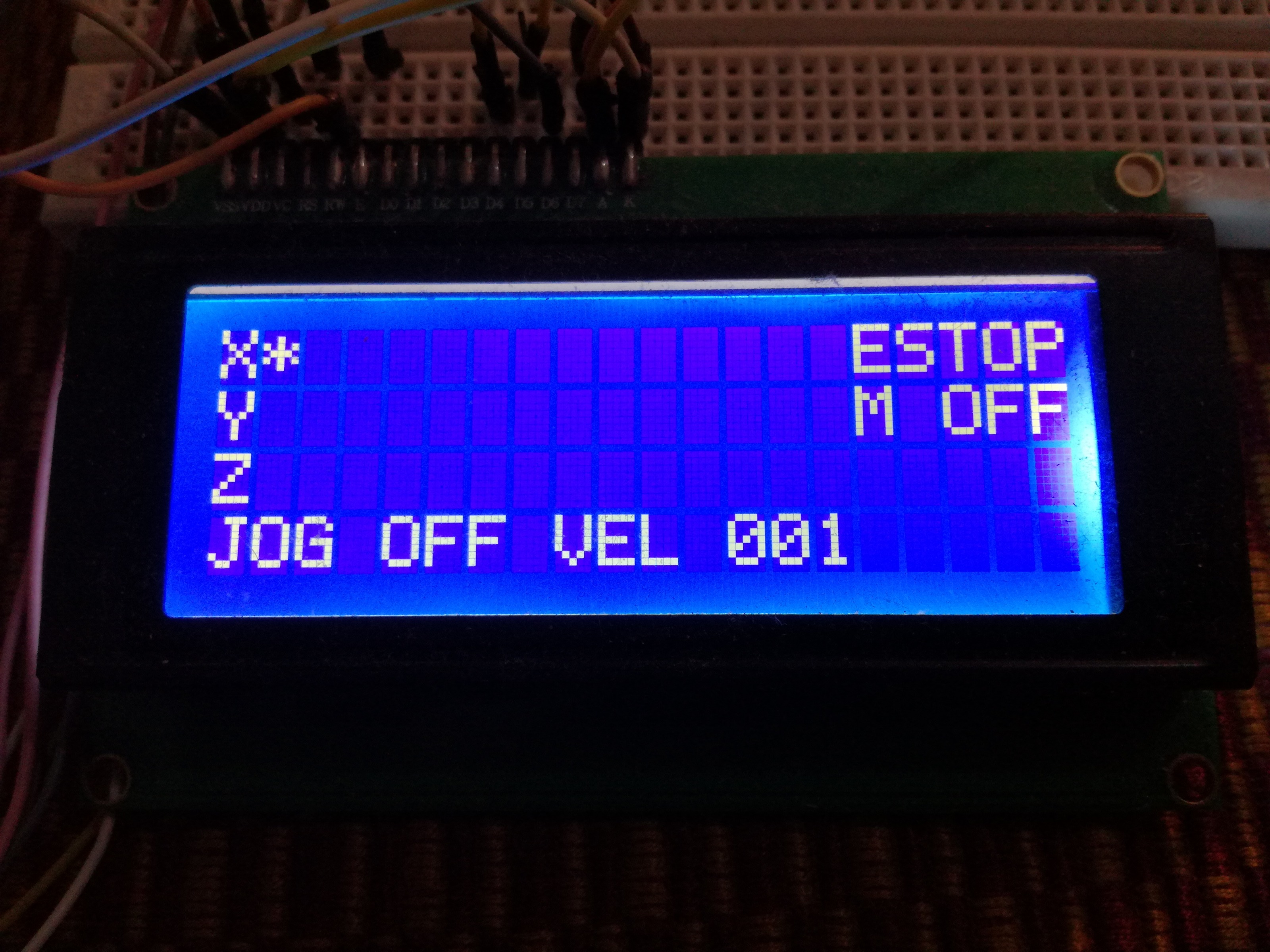
and in picture 2( that's what appear on the lcd when I start linuxcnc). I think it's a connection problem. Any advice? Thank you
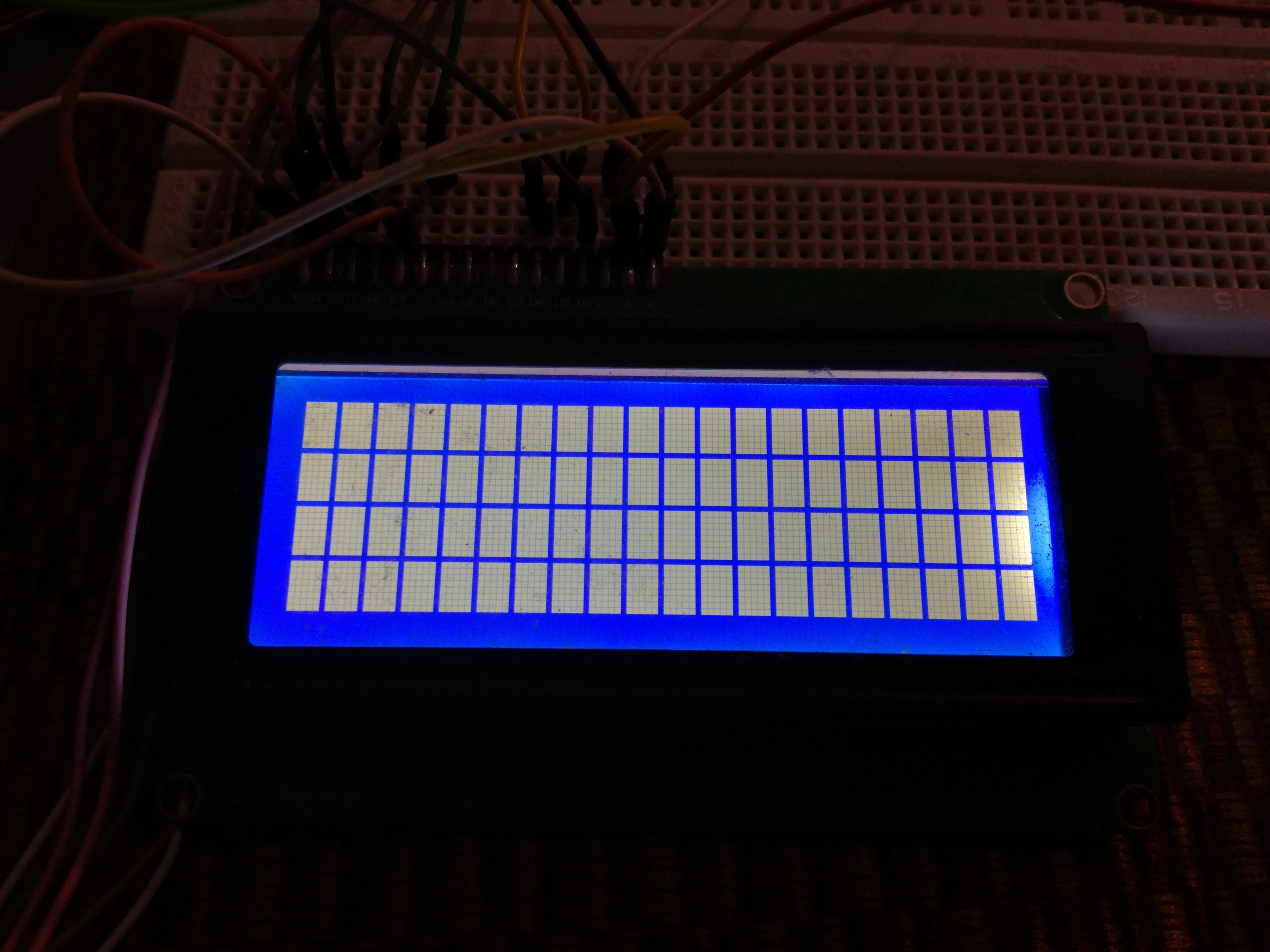
Arduino pendant when I start linuxcnc
Please Log in or Create an account to join the conversation.
- ArcEye
- Offline
- Junior Member
-

- Posts: 22
- Thank you received: 240
At the most basic level, make sure that the #define DEVICE= definition in serialcon2.comp is correct for your board, it needs to be whatever port you used to upload the arduino script arduinopendant.ino
Failing that, you need to attach all your config files (ini and hal), run with DEBUG=7 in your ini file and attach the debug output from stderr and linuxcnc.log
Please Log in or Create an account to join the conversation.
- ArcEye
- Offline
- Junior Member
-
- Posts: 22
- Thank you received: 240
Hello Mr ArcEye. I tried a fresh install for arduino pendant, and I got: " Pin 'halui.axis.0-pos-relative' does not exist" .
In custom_postgui.hal I have to put only
"loadusr -W serialcon2
net Xposition halui.axis.0.pos-relative serialcon2.xposition
net Yposition halui.axis.1.pos-relative serialcon2.yposition
net Zposition halui.axis.2.pos-relative serialcon2.zposition" ? Thank you
Please don't send me personal emails, I am not going to answer them
halui.axis.0-pos-relative is a valid pin, but without your config files I am not going to guess whether you have even enabled HALUI
www.linuxcnc.org/docs/devel/html/gui/halui.html
Please Log in or Create an account to join the conversation.
- anda
- Offline
- New Member
-
- Posts: 2
- Thank you received: 0
Please Log in or Create an account to join the conversation.
- ArcEye
- Offline
- Junior Member
-
- Posts: 22
- Thank you received: 240
Once right at the start of adna.hal, before any rt components have been loaded
loadusr -W serialcon2
loadrt trivkins
loadrt [EMCMOT]EMCMOT base_period_nsec=[EMCMOT]BASE_PERIOD servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[TRAJ]AXES
loadrt hal_parport cfg="0 out"
setp parport.0.reset-time 5000
loadrt stepgen step_type=0,0,0
loadrt pwmgen output_type=1and then again in custom_postgui.hal
It should only be loaded once in custom_postgui.hal, after everything else is loaded.
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

- Posts: 19860
- Thank you received: 4636
Please Log in or Create an account to join the conversation.
- travis036
-

- Offline
- Elite Member
-

- Posts: 283
- Thank you received: 32
Very neat project!
~Travis
Please Log in or Create an account to join the conversation.
- travis036
-
- Offline
- Elite Member
-
- Posts: 283
- Thank you received: 32
I have a 4.3" Nextion display i was thinking of incorporating into a wireless (Xbee) pendant.
I haven't started building my CNC router yet, but my brain is still churning at the idea.

~Travis
Please Log in or Create an account to join the conversation.
- JDona
- Offline
- New Member
-
- Posts: 3
- Thank you received: 0
I do have a question though; would the same structure work on a TCP/IP socket in HAL? Basically, include socket and open a port, wait for connection and process. Or while running loadusr, the component tries to establish a TCP/IP connection to a hard-coded IP, and if not found then exit otherwise stay in the loop to send the HAL signals to that address?
Maybe what i am trying to check if HAL support TCP/IP binding in C (not Python). If so, any source example of such component available?
Thank you.
Jim.
Please Log in or Create an account to join the conversation.
- jmr
-

- Offline
- Senior Member
-

- Posts: 43
- Thank you received: 7
I hope no one will be upset about an old topic coming up.
There was a question about HID implementation. I have recently found (and tested!) on Arduino UNO the modified bootloader, called HoodLoader2. There are some examples included. Once it is (finally) installed and working, it allows easy reprogramming of BOTH MCUs, with usb cable just as easy as normal programming.
It can be easily turned into HID keyboard, with functional LEDs (I believe up to 8 - with 5 of them other than caps/num/scroll lock) - like they should function in keyboard - they can be set up from PC side, or one keyboard can set the led on the other. There is no display, but that should not be a problem since there can be parallel usb usart configured and may be used for display only operation.
That should be good for some kind of button+led panel, but remember it has its own set of pros and cons:
- it is a keyboard. May be easy to bind interface to keyboard based app or mimic the relevant axis hot keys, or not easy as those are not hal pins but keypresses. It will stop working when you switch to console terminal (out of X), while the serial version will work all the time.
- E-STOP is not real - it will fail - as in above warning, but then again it is still usb based and should be considered unreliable.
- the leds can be set with linux program "setleds" from console or a script. I need to do some more testing on that as it seems to fail currently on my XFCE and works well in console.
This is just some info, as it requires some experienced programming to handle. If anyone is interested I can provide my working capslock example.
I shall try the latest ArcEye code found in the thread when I find it, or maybe there are some updates? I think I will work on that,at least the python side as I might try C without all the arduino layers if it is too slow. Arduinos test program with graphical wg12864 seems to get around 14 fps drawing some stuff and some text, there should be some time for keys processing.
questions of the day:
Is the unreliable key response the main problem when using faster refresh rate?
Does NICENESS (man nice) affect the userspace thread response time?
Please Log in or Create an account to join the conversation.