- Hardware & Machines
- Computers and Hardware
- Hardware for the new Preempt-RT Kernel with Ethernet Mesa Cards
Hardware for the new Preempt-RT Kernel with Ethernet Mesa Cards
- Xnke
- Offline
- Senior Member
-

Less
More
- Posts: 79
- Thank you received: 3
18 Oct 2018 02:46 #118972
by Xnke
Hardware for the new Preempt-RT Kernel with Ethernet Mesa Cards was created by Xnke
So I was planning to use my Via C7/Unichrome GPU mini itx board to run Linuxcnc. Which it will do just fine.
However, it won't run the 2.8 release, nor will it do the Preempt-RT kernel, without the jitter going nuts. Also the graphics...well...only the vesa framebuffer works and it's not great.
Now I'm looking at a few other boards:
Asus ITX-220 Intel Celeron based, not sure what speeds
The D525 Atom 1.8ghz boards, supposedly these aren't great either with the newer kernels
Celeron 847 based boards, at 1.1ghz
Now, I'm not a CPU snob, but the Celery line has always been, well, chopped vegetables. Are they good enough to work with a decent graphical environment, 150K line g-code programs, and the new real-time kernels?
What kind of power do I need to be looking at to run the 2.8 release, Preempt-RT, and the Mesa 7I96 card, with 4 axis plus spindle control operation?
However, it won't run the 2.8 release, nor will it do the Preempt-RT kernel, without the jitter going nuts. Also the graphics...well...only the vesa framebuffer works and it's not great.
Now I'm looking at a few other boards:
Asus ITX-220 Intel Celeron based, not sure what speeds
The D525 Atom 1.8ghz boards, supposedly these aren't great either with the newer kernels
Celeron 847 based boards, at 1.1ghz
Now, I'm not a CPU snob, but the Celery line has always been, well, chopped vegetables. Are they good enough to work with a decent graphical environment, 150K line g-code programs, and the new real-time kernels?
What kind of power do I need to be looking at to run the 2.8 release, Preempt-RT, and the Mesa 7I96 card, with 4 axis plus spindle control operation?
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-

Less
More
- Posts: 17985
- Thank you received: 5277
18 Oct 2018 03:26 #118974
by PCW
Replied by PCW on topic Hardware for the new Preempt-RT Kernel with Ethernet Mesa Cards
The Celeron 847 is the newest and fastest of the CPUs listed (though still 7 years old)
A current J3355 or J3455 is probably a better choice for a fanless CPU
A current J3355 or J3455 is probably a better choice for a fanless CPU
Please Log in or Create an account to join the conversation.
- Xnke
- Offline
- Senior Member
-
Less
More
- Posts: 79
- Thank you received: 3
18 Oct 2018 13:02 #118994
by Xnke
Replied by Xnke on topic Hardware for the new Preempt-RT Kernel with Ethernet Mesa Cards
Just picked up a new Asrock J3455 board and 4GB of ram. Still under 100$ so far so even if it does turn out to be a Celery instead of a Celeron, I won't be too upset. It'll just become the shop computer for all my lathe porn needs, I guess.
In non CNC news, a Logan 11" lathe followed me home at lunch yesterday. It needs a bit of love, but it will do nicely for making the few parts I can't make at work for the Epoxy-Granite mill.
In non CNC news, a Logan 11" lathe followed me home at lunch yesterday. It needs a bit of love, but it will do nicely for making the few parts I can't make at work for the Epoxy-Granite mill.
Please Log in or Create an account to join the conversation.
- Xnke
- Offline
- Senior Member
-
Less
More
- Posts: 79
- Thank you received: 3
31 Oct 2018 01:29 #119681
by Xnke
Replied by Xnke on topic Hardware for the new Preempt-RT Kernel with Ethernet Mesa Cards
Alright, all settled in in the new machine. Time to do latency tuning, I guess.
AsRock J-3455B-ITX mainboard, with 4gb of ram, 320gb conventional sata drive (it was brand new and I already had it, may upgrade to a SSD later.)
Linux Mint 19, with the Cinnamon GUI
Kernel 4.19-RT9 patched and configured for Preempt-RT
LinuxCNC Master
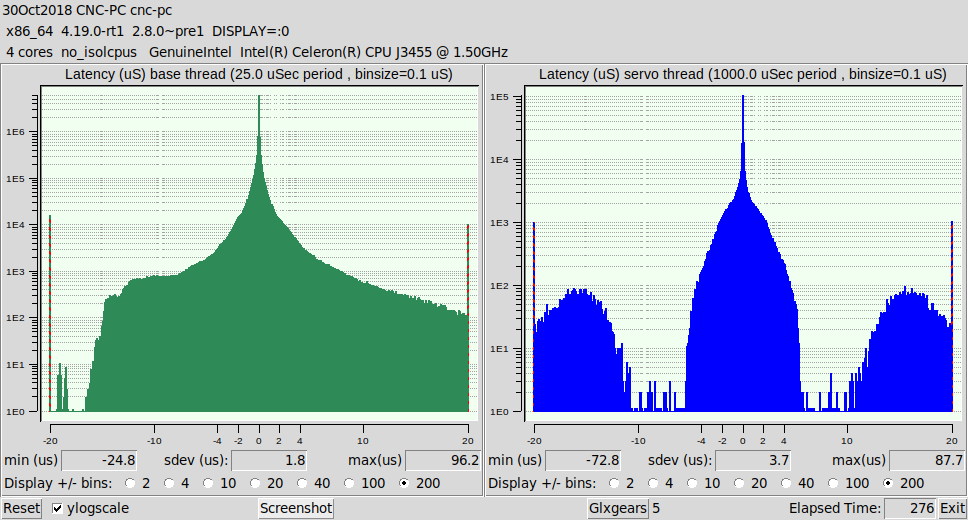
Currently the worst jitter is 80605ns, after 4 hours of AVE on youtube, 3x GLX gears at 60fps, and me flopping windows all over. That is with a 1ms servo thread, and a 25us base thread.
AsRock J-3455B-ITX mainboard, with 4gb of ram, 320gb conventional sata drive (it was brand new and I already had it, may upgrade to a SSD later.)
Linux Mint 19, with the Cinnamon GUI
Kernel 4.19-RT9 patched and configured for Preempt-RT
LinuxCNC Master
Currently the worst jitter is 80605ns, after 4 hours of AVE on youtube, 3x GLX gears at 60fps, and me flopping windows all over. That is with a 1ms servo thread, and a 25us base thread.
Please Log in or Create an account to join the conversation.
- Xnke
- Offline
- Senior Member
-
Less
More
- Posts: 79
- Thank you received: 3
31 Oct 2018 01:31 #119682
by Xnke
Replied by Xnke on topic Hardware for the new Preempt-RT Kernel with Ethernet Mesa Cards
Here's a shot of Latency-Histogram before doing any tuning:
Please Log in or Create an account to join the conversation.
- Xnke
- Offline
- Senior Member
-
Less
More
- Posts: 79
- Thank you received: 3
31 Oct 2018 02:09 #119683
by Xnke
Replied by Xnke on topic Hardware for the new Preempt-RT Kernel with Ethernet Mesa Cards
So I just finished reading the installation materials and realized I have done the RIP method of installation-I should go back and do the packaged installation to get a normal install.
Part of the trouble is that I can't just $latency-test, I have to $bash latency-test and now after closing the original terminal, I can't even get latency-histogram to work at all. Ugh, I used to be good at this...but the last kernel I built was 2.8.6.
After running SMICtrl, latency dropped to 50804, but that's all the tuning I've done so far. Gotta fix this script mess first.
surprisingly, the desktop environment isn't too bad. It's on par with my work machine, until I start doing some heavy lifting with it. Then it has a bit of lag time to it.
Opinions on how to best finish up the installation, and getting my latency down low enough to run the 7I96?
Part of the trouble is that I can't just $latency-test, I have to $bash latency-test and now after closing the original terminal, I can't even get latency-histogram to work at all. Ugh, I used to be good at this...but the last kernel I built was 2.8.6.
After running SMICtrl, latency dropped to 50804, but that's all the tuning I've done so far. Gotta fix this script mess first.
surprisingly, the desktop environment isn't too bad. It's on par with my work machine, until I start doing some heavy lifting with it. Then it has a bit of lag time to it.
Opinions on how to best finish up the installation, and getting my latency down low enough to run the 7I96?
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17985
- Thank you received: 5277
31 Oct 2018 05:01 #119686
by PCW
Replied by PCW on topic Hardware for the new Preempt-RT Kernel with Ethernet Mesa Cards
A couple of notes
1. You don't need or want a base thread so its better to start the latency histogram from a command line with:
latency-histogram --nobase --sbinsize 1000
2. The latency-test and latency histogram are optimistic because they basically measure dispatch latency, but not the actual delays if cache misses occur or hardware is accessed. LinuxCNCs actual latency for running LinuxCNC code and access to hardware is typically proportional to the latency test or latency values but will be longer. The actual running latency should be checked by making sure that
servo-thread.tmax/motion.servo.last-period is always less than 1/2 (that is no more than 1/2 of the total servo period is used up by waiting for hardware and code run time
1. You don't need or want a base thread so its better to start the latency histogram from a command line with:
latency-histogram --nobase --sbinsize 1000
2. The latency-test and latency histogram are optimistic because they basically measure dispatch latency, but not the actual delays if cache misses occur or hardware is accessed. LinuxCNCs actual latency for running LinuxCNC code and access to hardware is typically proportional to the latency test or latency values but will be longer. The actual running latency should be checked by making sure that
servo-thread.tmax/motion.servo.last-period is always less than 1/2 (that is no more than 1/2 of the total servo period is used up by waiting for hardware and code run time
Please Log in or Create an account to join the conversation.
- Hardware & Machines
- Computers and Hardware
- Hardware for the new Preempt-RT Kernel with Ethernet Mesa Cards
Time to create page: 0.199 seconds