configuration THCUD component not work
- Valelinux
-
 Topic Author
Topic Author
- Offline
- New Member
-

Less
More
- Posts: 5
- Thank you received: 0
09 May 2017 19:49 - 09 May 2017 19:52 #92944
by Valelinux
configuration THCUD component not work was created by Valelinux
Good evening to you all
I can not configure the thcud component correctly. I followed the guides of Big John Thornton adding the net and compiled the thcud.comp and everything works axis starts but my z axis remains stationary. Thc signals (Proma compact thc) are right and they come to the breakoutboard but I'm not up to the problem. The only change I made was to remove the link to the arcok signal in thcud.comp as I only released two inputs on the breakout board on pin 13 and pin 15. I had to comment on the line:
#net torch-on motion.spindle-on => parport.0.pin-14-out #
In custom.hal because at axis start I was mistaken by saying that the spindle-on was already connected.
I hope some of you can possibly
help me Big John
I attach the configuration
Sorry my English but I am writing to you from italy
thank you so much
I can not configure the thcud component correctly. I followed the guides of Big John Thornton adding the net and compiled the thcud.comp and everything works axis starts but my z axis remains stationary. Thc signals (Proma compact thc) are right and they come to the breakoutboard but I'm not up to the problem. The only change I made was to remove the link to the arcok signal in thcud.comp as I only released two inputs on the breakout board on pin 13 and pin 15. I had to comment on the line:
#net torch-on motion.spindle-on => parport.0.pin-14-out #
In custom.hal because at axis start I was mistaken by saying that the spindle-on was already connected.
I hope some of you can possibly
help me Big John
I attach the configuration
Sorry my English but I am writing to you from italy
thank you so much
Last edit: 09 May 2017 19:52 by Valelinux.
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21747
- Thank you received: 7433
09 May 2017 22:13 - 09 May 2017 22:14 #92957
by tommylight
Replied by tommylight on topic configuration THCUD component not work
That is a comp writen by JT, so he may be of more help.
If you have PROMA THC, maybe you should try this
forum.linuxcnc.org/49-basic-configuratio...hc-config-that-works
It has everything automated in hal and all the setings on a side panel in AXIS screen. Needs a bit of editing to suit your setup, but it works nicely.
If you have PROMA THC, maybe you should try this
forum.linuxcnc.org/49-basic-configuratio...hc-config-that-works
It has everything automated in hal and all the setings on a side panel in AXIS screen. Needs a bit of editing to suit your setup, but it works nicely.
Last edit: 09 May 2017 22:14 by tommylight.
Please Log in or Create an account to join the conversation.
- Valelinux
-
Topic Author
- Offline
- New Member
-
Less
More
- Posts: 5
- Thank you received: 0
11 May 2017 11:40 - 11 May 2017 11:41 #93016
by Valelinux
Replied by Valelinux on topic configuration THCUD component not work
Thanks for the response tommylight
I saw your link, later I also experience that. I want to figure out what's wrong, because it seems all right and I can not find the error. Now I did also compile an antidive component that gave me a bit when the speed was different from the one required and with that signal turn off the thc, and Worked well I do not understand why this does not work.
Thanks a lot as soon as I try to update you
thank you
I saw your link, later I also experience that. I want to figure out what's wrong, because it seems all right and I can not find the error. Now I did also compile an antidive component that gave me a bit when the speed was different from the one required and with that signal turn off the thc, and Worked well I do not understand why this does not work.
Thanks a lot as soon as I try to update you
thank you
Last edit: 11 May 2017 11:41 by Valelinux.
Please Log in or Create an account to join the conversation.
- Valelinux
-
Topic Author
- Offline
- New Member
-
Less
More
- Posts: 5
- Thank you received: 0
30 May 2017 06:37 - 30 May 2017 10:21 #93829
by Valelinux
Replied by Valelinux on topic configuration THCUD component not work
good morning guys
I solved two issues I explained to them:
Pin 14 was already connected to the spindle on by the axis configuration I did nothing but restart the configuration and put pin 14 on unused
Then I connected torch-on spindle-on and also arc-ok to pin 14 because i do not have a grease on the breakout board to bring the arcok signal from thc.
so
net torch-on thcud.arc-ok thcud.torch-on motion.spindle-on <= parport.0.pin-14-out
But the hint is that the pins vel-status do not change and come back to off I attach two pictures
Someone knows why
thank you
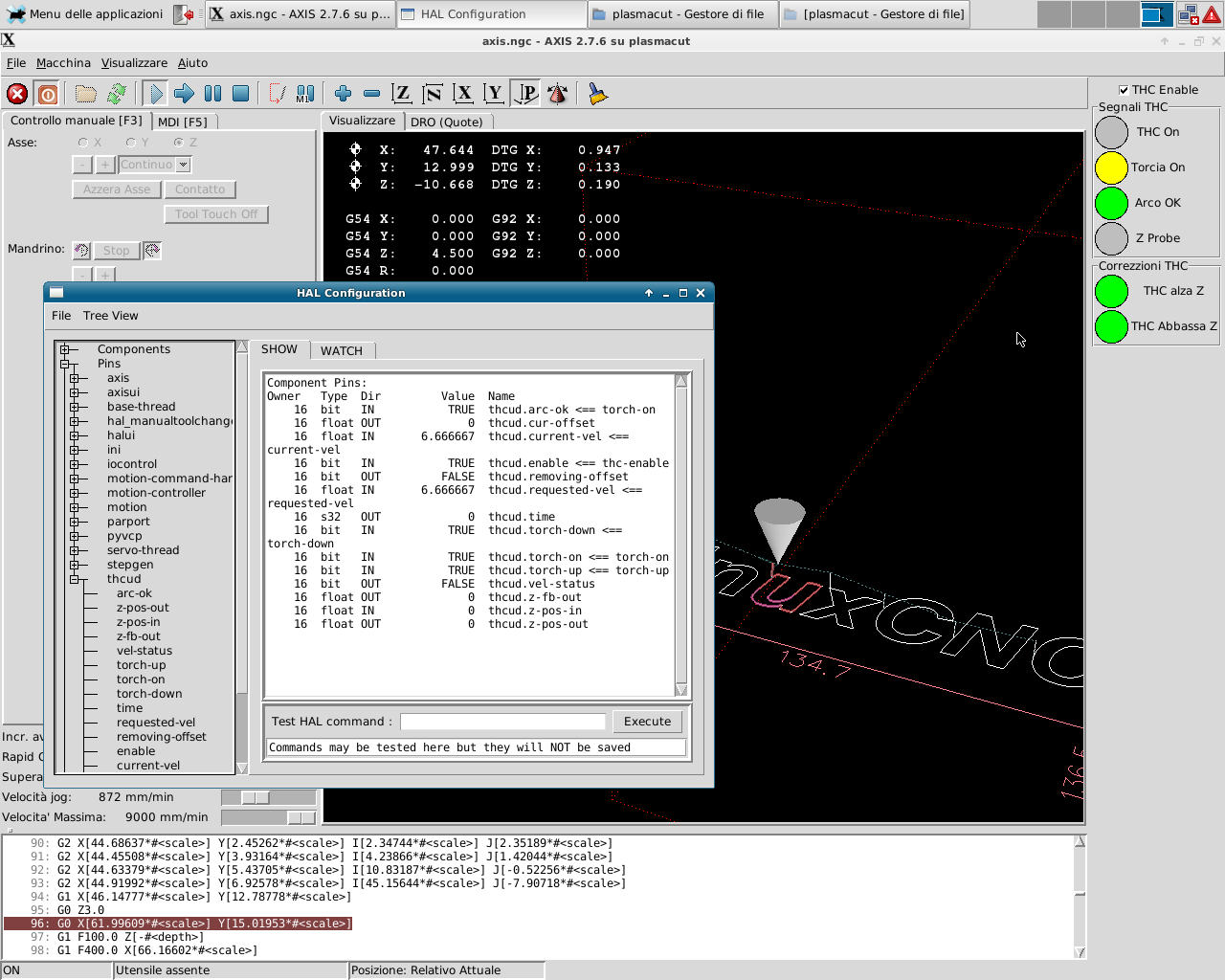
I solved two issues I explained to them:
Pin 14 was already connected to the spindle on by the axis configuration I did nothing but restart the configuration and put pin 14 on unused
Then I connected torch-on spindle-on and also arc-ok to pin 14 because i do not have a grease on the breakout board to bring the arcok signal from thc.
so
net torch-on thcud.arc-ok thcud.torch-on motion.spindle-on <= parport.0.pin-14-out
But the hint is that the pins vel-status do not change and come back to off I attach two pictures
Someone knows why
thank you
Last edit: 30 May 2017 10:21 by Valelinux.
Please Log in or Create an account to join the conversation.
- Valelinux
-
Topic Author
- Offline
- New Member
-
Less
More
- Posts: 5
- Thank you received: 0
30 May 2017 06:39 - 30 May 2017 10:28 #93830
by Valelinux
Replied by Valelinux on topic configuration THCUD component not work
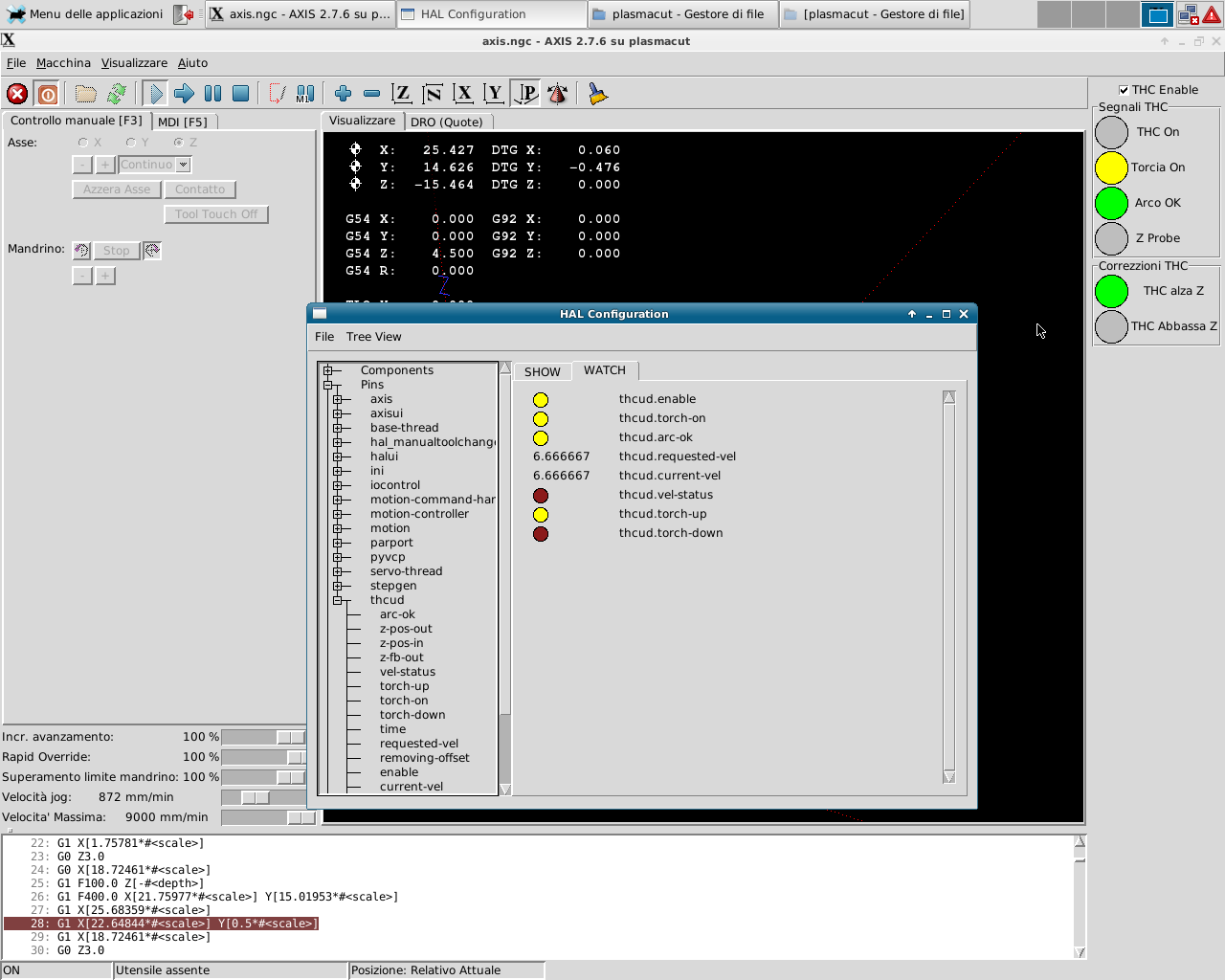
But the hint is that the pin Vel-status
does not change and come back on off I attach two pictures-.
Thc is not enabled because in thcud.com there is the condition:
If (torch_on && arc_ok && vel_status) {// allow correction
if (torch_down) {
Offset - = correction_vel;
So the
vel_status false condition does not let me run it all
Some idea ?
thank you all
does not change and come back on off I attach two pictures-.
Thc is not enabled because in thcud.com there is the condition:
If (torch_on && arc_ok && vel_status) {// allow correction
if (torch_down) {
Offset - = correction_vel;
So the
vel_status false condition does not let me run it all
Some idea ?
thank you all
Last edit: 30 May 2017 10:28 by Valelinux.
Please Log in or Create an account to join the conversation.
- Valelinux
-
Topic Author
- Offline
- New Member
-
Less
More
- Posts: 5
- Thank you received: 0
30 May 2017 10:58 - 30 May 2017 11:03 #93838
by Valelinux
Replied by Valelinux on topic configuration THCUD component not work
Vel_status is compiled so in thcud.com:
#include "rtapi_math.h"
FUNCTION(_) {
if(enable){
float min_velocity = requested_vel -(requested_vel*(velocity_tol*0.01));
if(current_vel > 0 && current_vel >= min_velocity){vel_status =1;}
else {vel_status =0;}
So if the
current_vel = request_vel,
as in the status figure, the status should be TRUE
but remains FALSE

#include "rtapi_math.h"
FUNCTION(_) {
if(enable){
float min_velocity = requested_vel -(requested_vel*(velocity_tol*0.01));
if(current_vel > 0 && current_vel >= min_velocity){vel_status =1;}
else {vel_status =0;}
So if the
current_vel = request_vel,
as in the status figure, the status should be TRUE
but remains FALSE
Last edit: 30 May 2017 11:03 by Valelinux.
Please Log in or Create an account to join the conversation.
Time to create page: 0.172 seconds