Problem with MB2HAL configuration
- dom96
- Offline
- Junior Member
-

Less
More
- Posts: 22
- Thank you received: 0
12 Jul 2018 12:00 - 12 Jul 2018 12:32 #114050
by dom96
Problem with MB2HAL configuration was created by dom96
Hi all,
I have been trying to use MB2HAL to get a motor current feedback from a servo drive through the modbus rtu protocol but I dont see any HAL pins being created in the LinuxCNC when I open the HAL meter. Do I have to create the pins manually? If yes then how do I do it?
What I have done so far is:
1. I added this lineinto the [HAL] section of the main machine configuration .ini file
2. I created modbus.hal file in the same directory and a put this line into it
3. I created the mb2hal_config_file.ini file in the same directory and I put my modbus transaction configuration into it. It is possible I configured the transaction incorrectly but I thought that I would at least be able to see hal pin for the modbus transaction.
Here I attach my modbus configuration .ini file
Here is a link to the servo drive modbus protocol manual:
pdf.directindustry.com/pdf/adtech-shenzh...n/114531-657678.html
I really spent a lot of time trying to solve the problem but I don't know much about HAL and how it works. I would be grateful if somebody could help me solve this problem.
I have been trying to use MB2HAL to get a motor current feedback from a servo drive through the modbus rtu protocol but I dont see any HAL pins being created in the LinuxCNC when I open the HAL meter. Do I have to create the pins manually? If yes then how do I do it?
What I have done so far is:
1. I added this line
MB2HAL = modbus.hal2. I created modbus.hal file in the same directory and a put this line into it
loadusr -W mb2hal config = mb2hal_config_file.ini3. I created the mb2hal_config_file.ini file in the same directory and I put my modbus transaction configuration into it. It is possible I configured the transaction incorrectly but I thought that I would at least be able to see hal pin for the modbus transaction.
Here I attach my modbus configuration .ini file
Here is a link to the servo drive modbus protocol manual:
pdf.directindustry.com/pdf/adtech-shenzh...n/114531-657678.html
I really spent a lot of time trying to solve the problem but I don't know much about HAL and how it works. I would be grateful if somebody could help me solve this problem.
Last edit: 12 Jul 2018 12:32 by dom96.
Please Log in or Create an account to join the conversation.
- AnnoyingMutt
-

- Visitor
-

12 Jul 2018 14:35 #114062
by AnnoyingMutt
Replied by AnnoyingMutt on topic Problem with MB2HAL configuration
Try this exactly as typed:
Will create:
Component Pins:
Owner Type Dir Value Name
8 float OUT 0 mb2hal.torqueD1.00.float
8 s32 OUT 0 mb2hal.torqueD1.00.int
8 u32 OUT 0x0000005C mb2hal.torqueD1.num_errors
I used halrun in one terminal to load the ini file & halcmd show pin in a second terminal.
If you are using a run-in-place install you will have to load rip-environment in both terminals. If you are using the iso or installed via debs you don't have to.
Obviously I don't have any hardware connected to ttyUSB0 so can't test the transactions.
loadusr -W mb2hal config=mb2hal_config_file.iniWill create:
Component Pins:
Owner Type Dir Value Name
8 float OUT 0 mb2hal.torqueD1.00.float
8 s32 OUT 0 mb2hal.torqueD1.00.int
8 u32 OUT 0x0000005C mb2hal.torqueD1.num_errors
I used halrun in one terminal to load the ini file & halcmd show pin in a second terminal.
If you are using a run-in-place install you will have to load rip-environment in both terminals. If you are using the iso or installed via debs you don't have to.
Obviously I don't have any hardware connected to ttyUSB0 so can't test the transactions.
Please Log in or Create an account to join the conversation.
- dom96
- Offline
- Junior Member
-
Less
More
- Posts: 22
- Thank you received: 0
16 Jul 2018 12:55 #114295
by dom96
Replied by dom96 on topic Problem with MB2HAL configuration
Thank you.
I tried your solution and I can now see the pins using the halcmd show pin command but looking at the terminal where I loaded the file I see the following transaction failure message
I think that maybe I have done the wiring incorrectly as the manual is a little confusing.
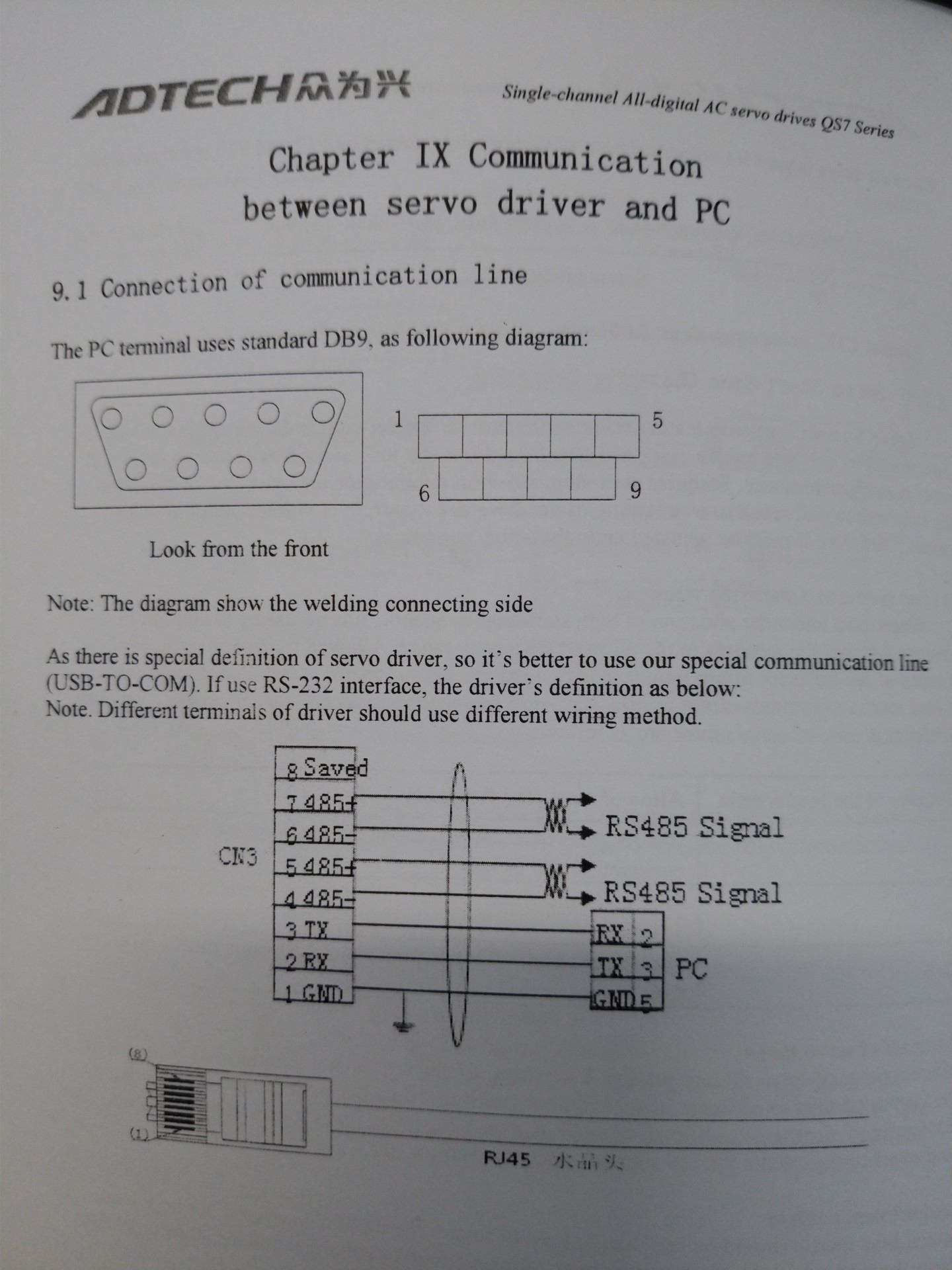
I have set the communication type parameter on the drive to operate in RS-485 and I set the same baud rate as in my configuration file.
The USB-RS-485 adapter I got is just a 2 wire same as the one on the picture below

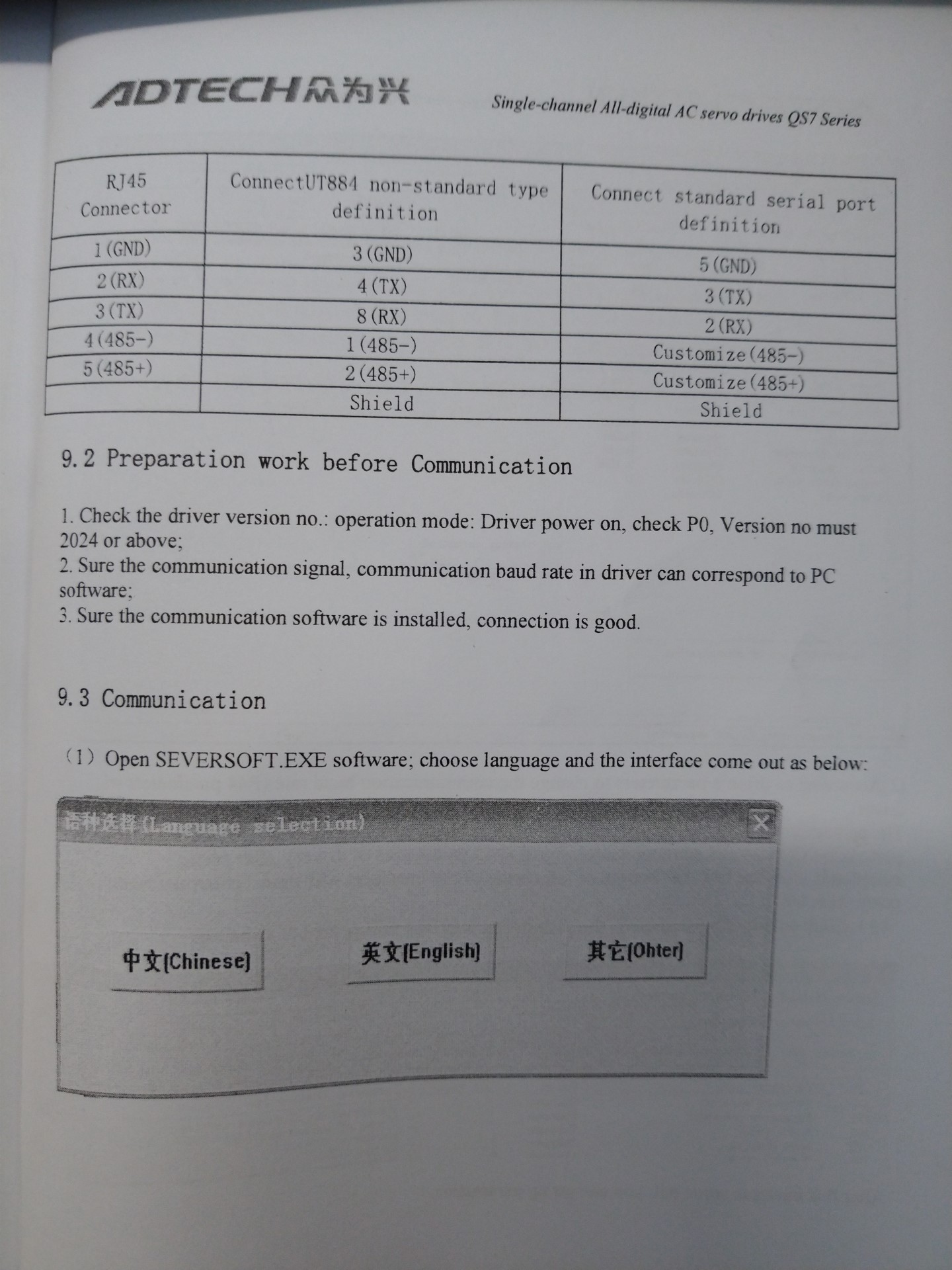
I connected pins 4 and 6 to B(D-) terminal and the pins 5 and 7 to A(D+) terminal. I left all the remaining RJ45 wires disconnected.
Is this the correct way to wire or did I make a mistake there?
I tried your solution and I can now see the pins using the halcmd show pin command but looking at the terminal where I loaded the file I see the following transaction failure message
mb2hal fnct_03_read_holding_registers ERR: mb_tx[0] mb_links[0] slave[1] = ret[-1] fd[4]
mb2hal link_loop_and_logic ERR: mb_tx_num[0] mb_links[0] thread[0] fd[4] transaction failure, num_errors[1]I think that maybe I have done the wiring incorrectly as the manual is a little confusing.
I have set the communication type parameter on the drive to operate in RS-485 and I set the same baud rate as in my configuration file.
The USB-RS-485 adapter I got is just a 2 wire same as the one on the picture below
I connected pins 4 and 6 to B(D-) terminal and the pins 5 and 7 to A(D+) terminal. I left all the remaining RJ45 wires disconnected.
Is this the correct way to wire or did I make a mistake there?
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19888
- Thank you received: 4645
17 Jul 2018 13:09 #114380
by andypugh
Replied by andypugh on topic Problem with MB2HAL configuration
I think that you probably only need to connect to one of the RS485 pins. (But you might well find that both D+ and D- pins are internally connected and are duplicated only to allow daisy-chaining)
You might need to connect the GND to the same GND as the controlling PC.
You might need to connect the GND to the same GND as the controlling PC.
The following user(s) said Thank You: dom96
Please Log in or Create an account to join the conversation.
- dom96
- Offline
- Junior Member
-
Less
More
- Posts: 22
- Thank you received: 0
18 Jul 2018 16:02 - 18 Jul 2018 16:03 #114476
by dom96
Replied by dom96 on topic Problem with MB2HAL configuration
Thank you. I have the wiring problem solved now. The PC is now communicating with the drive.
Does anybody know how to change the register address accessed in the MB2HAL transactions?
I tried different values of FIRST_ELEMENT which I thought was the register address because it is described in the comment as "The first element address" but it doesnt seem to change anything. My ModBus transaction seems to be accessing the same 0000H register and I know it is this register because I keep getting a feedback with the value 3018 which I know for a fact is stored in this register.
Does anybody know how to change the register address accessed in the MB2HAL transactions?
I tried different values of FIRST_ELEMENT which I thought was the register address because it is described in the comment as "The first element address" but it doesnt seem to change anything. My ModBus transaction seems to be accessing the same 0000H register and I know it is this register because I keep getting a feedback with the value 3018 which I know for a fact is stored in this register.
Last edit: 18 Jul 2018 16:03 by dom96.
Please Log in or Create an account to join the conversation.
- AnnoyingMutt
-
- Visitor
-
19 Jul 2018 06:18 - 19 Jul 2018 06:24 #114517
by AnnoyingMutt
Replied by AnnoyingMutt on topic Problem with MB2HAL configuration
I've used this before, may want to give it a whirl to check comms and that between pc & servo drive......gives nice debug info
github.com/ed-chemnitz/qmodbus/
when experimenting with modbus over tcp (also supports RTU so can test serial)
I have qt4 installed on my system and it compiled ok, I'm running stretch amd64, appears to open ok....no seg faults, unfortunately haven't been able to test......can't find my arduino slave ATM.
If you build it, be sure to note the .. after qmake command, I almost missed it
A search for "modbus master simulator" will bring up other hits, haven't done much looking into a slave sim but I'm sure there is a few around. Maybe this might be an option www.modbusdriver.com/diagslave.html
github.com/ed-chemnitz/qmodbus/
when experimenting with modbus over tcp (also supports RTU so can test serial)
I have qt4 installed on my system and it compiled ok, I'm running stretch amd64, appears to open ok....no seg faults, unfortunately haven't been able to test......can't find my arduino slave ATM.
If you build it, be sure to note the .. after qmake command, I almost missed it
A search for "modbus master simulator" will bring up other hits, haven't done much looking into a slave sim but I'm sure there is a few around. Maybe this might be an option www.modbusdriver.com/diagslave.html
Last edit: 19 Jul 2018 06:24 by AnnoyingMutt.
Please Log in or Create an account to join the conversation.
- dom96
- Offline
- Junior Member
-
Less
More
- Posts: 22
- Thank you received: 0
19 Jul 2018 10:24 #114523
by dom96
Replied by dom96 on topic Problem with MB2HAL configuration
Problem solved. Turned out I totally missed the fact MB2HAL takes values in decimal form while the register address is hexadecimal. Converting the hex form of register address to decimal solved the problem
Please Log in or Create an account to join the conversation.
- AnnoyingMutt
-
- Visitor
-
19 Jul 2018 12:26 - 19 Jul 2018 12:26 #114526
by AnnoyingMutt
Well done sir.......nothing like a simple fix
Something to keep in mind tho")
Replied by AnnoyingMutt on topic Problem with MB2HAL configuration
Problem solved. Turned out I totally missed the fact MB2HAL takes values in decimal form while the register address is hexadecimal. Converting the hex form of register address to decimal solved the problem
Well done sir.......nothing like a simple fix
Something to keep in mind tho
Last edit: 19 Jul 2018 12:26 by AnnoyingMutt.
Please Log in or Create an account to join the conversation.
Time to create page: 0.185 seconds