SOLVED G0 max feed override Axis at Startup
- pl7i92
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 1872
- Thank you received: 358
08 Apr 2019 12:53 - 11 Apr 2019 15:12 #130503
by pl7i92
SOLVED G0 max feed override Axis at Startup was created by pl7i92
hi
the slider from AXIS
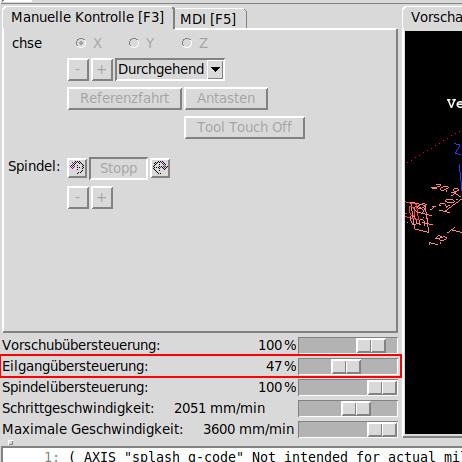
can this be set in the HAL from Startup to 50%
HOW doi i do this
###############################
SOLVED
###############################
the slider from AXIS
can this be set in the HAL from Startup to 50%
HOW doi i do this
###############################
SOLVED
###############################
not that elegant but it workes
2.8.pre
into a postgui HAL file
# rapid feedoverride at startup
# first enable the inputs
setp halui.rapid-override.count-enable 1
setp halui.rapid-override.direct-value 1
# set 2 values to trigger by mashine on
loadrt mux2 count=1
addf mux2.0 servo-thread
setp mux2.0.in1 5.0
setp mux2.0.in0 1.0
net trigger_rapid_override mux2.0.sel <= motion.motion-enabled
#convert the values to the needed float to s32
loadrt conv_float_s32 count=1
addf conv-float-s32.0 servo-thread
net conv_tofloat mux2.0.out => conv-float-s32.0.in
#set the value to the override from halui
net rapid_count conv-float-s32.0.out halui.rapid-override.counts Attachments:
Last edit: 11 Apr 2019 15:12 by pl7i92. Reason: solved
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21768
- Thank you received: 7440
09 Apr 2019 01:47 #130539
by tommylight
Replied by tommylight on topic G0 max feed override Axis at Startup
Yes in the ini file under DISPLAY.
Please Log in or Create an account to join the conversation.
- pl7i92
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1872
- Thank you received: 358
10 Apr 2019 06:53 #130590
by pl7i92
Replied by pl7i92 on topic G0 max feed override Axis at Startup
there is no default_rapid
DEFAULT_LINEAR_VELOCITY = .25 - The default velocity for linear jogs, in , machine units per second.
takes on the 3rd bar
DEFAULT_LINEAR_VELOCITY = .25 - The default velocity for linear jogs, in , machine units per second.
takes on the 3rd bar
Please Log in or Create an account to join the conversation.
- pl7i92
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1872
- Thank you received: 358
11 Apr 2019 06:22 #130642
by pl7i92
Replied by pl7i92 on topic G0 max feed override Axis at Startup
No luck so far
the
setp halui.rapid-override.counts -5
sets it to 50%
but you cand do this at startup
the
setp halui.rapid-override.counts -5
sets it to 50%
but you cand do this at startup
Please Log in or Create an account to join the conversation.
- pl7i92
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1872
- Thank you received: 358
11 Apr 2019 15:11 #130670
by pl7i92
Replied by pl7i92 on topic SOLVED G0 max feed override Axis at Startup
not that elegant but it workes
2.8.pre
into a postgui HAL file
# rapid feedoverride at startup
# first enable the inputs
setp halui.rapid-override.count-enable 1
setp halui.rapid-override.direct-value 1
# set 2 values to trigger by mashine on
loadrt mux2 count=1
addf mux2.0 servo-thread
setp mux2.0.in1 5.0
setp mux2.0.in0 1.0
net trigger_rapid_override mux2.0.sel <= motion.motion-enabled
#convert the values to the needed float to s32
loadrt conv_float_s32 count=1
addf conv-float-s32.0 servo-thread
net conv_tofloat mux2.0.out => conv-float-s32.0.in
#set the value to the override from halui
net rapid_count conv-float-s32.0.out halui.rapid-override.counts
2.8.pre
into a postgui HAL file
# rapid feedoverride at startup
# first enable the inputs
setp halui.rapid-override.count-enable 1
setp halui.rapid-override.direct-value 1
# set 2 values to trigger by mashine on
loadrt mux2 count=1
addf mux2.0 servo-thread
setp mux2.0.in1 5.0
setp mux2.0.in0 1.0
net trigger_rapid_override mux2.0.sel <= motion.motion-enabled
#convert the values to the needed float to s32
loadrt conv_float_s32 count=1
addf conv-float-s32.0 servo-thread
net conv_tofloat mux2.0.out => conv-float-s32.0.in
#set the value to the override from halui
net rapid_count conv-float-s32.0.out halui.rapid-override.counts
Please Log in or Create an account to join the conversation.
Time to create page: 0.094 seconds