Is there a Halpin for the current feedrate
- rodw
-

- Offline
- Platinum Member
-

Less
More
- Posts: 11948
- Thank you received: 4068
02 Jun 2020 17:08 - 02 Jun 2020 17:09 #169823
by rodw
Replied by rodw on topic Is there a Halpin for the current feedrate
Thats very exciting you got that far.
motion.motion−type will let you know if it is a traverse (G0), Linear feed (G1) or an arc (G2,G3) so you should be able to filter it from here.
The problem with motion.requested-vel is that it reports the feedrate that the motion controller has set for a given segment which can be reduced if it is too short a segment to allow the trapezoidal acceleration profile get to the feedrate. These graphs hopefully demonstrate what I mean. The one on the right is constrained to 6000 mm/min instead of 10240 mm/min as on the left
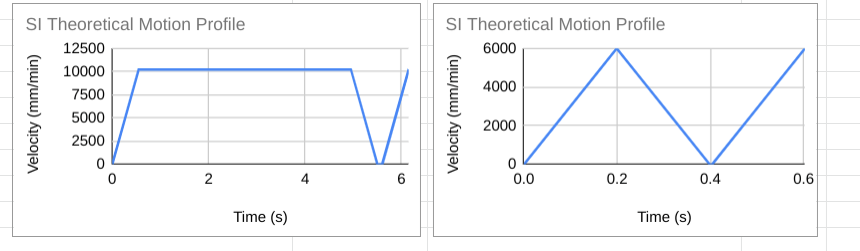
If you use halscope to monitor motion.current-vel, you will get exactly this shape. It would be interesting to monitor your pin with motion.current-vel and motion.requested-vel in halsope on short profiles to confirm it is correct.
So now it would be great if somebody could give a clue about how to access the same data from a realtime component created with halcompile. Something I've wanted to do for a long time.
motion.motion−type will let you know if it is a traverse (G0), Linear feed (G1) or an arc (G2,G3) so you should be able to filter it from here.
The problem with motion.requested-vel is that it reports the feedrate that the motion controller has set for a given segment which can be reduced if it is too short a segment to allow the trapezoidal acceleration profile get to the feedrate. These graphs hopefully demonstrate what I mean. The one on the right is constrained to 6000 mm/min instead of 10240 mm/min as on the left
If you use halscope to monitor motion.current-vel, you will get exactly this shape. It would be interesting to monitor your pin with motion.current-vel and motion.requested-vel in halsope on short profiles to confirm it is correct.
So now it would be great if somebody could give a clue about how to access the same data from a realtime component created with halcompile. Something I've wanted to do for a long time.
Attachments:
Last edit: 02 Jun 2020 17:09 by rodw.
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 11948
- Thank you received: 4068
02 Jun 2020 17:33 #169834
by rodw
Replied by rodw on topic Is there a Halpin for the current feedrate
Actually, rereading your last post, I did not address the feed override. You need to calculate the true feedrate yourself with some simple maths. You can do this in your screen handler. Its ages since I played with that stuff but cmorely is the expert. So hopefully he will help if you get stuck.
And of course in that handler you can set the value to zero when motion.motion-type = 0 (idle)
And of course in that handler you can set the value to zero when motion.motion-type = 0 (idle)
Please Log in or Create an account to join the conversation.
- Aciera
-
 Topic Author
Topic Author
- Offline
- Administrator
-

Less
More
- Posts: 4707
- Thank you received: 2106
03 Jun 2020 05:38 #169912
by Aciera
Replied by Aciera on topic Is there a Halpin for the current feedrate
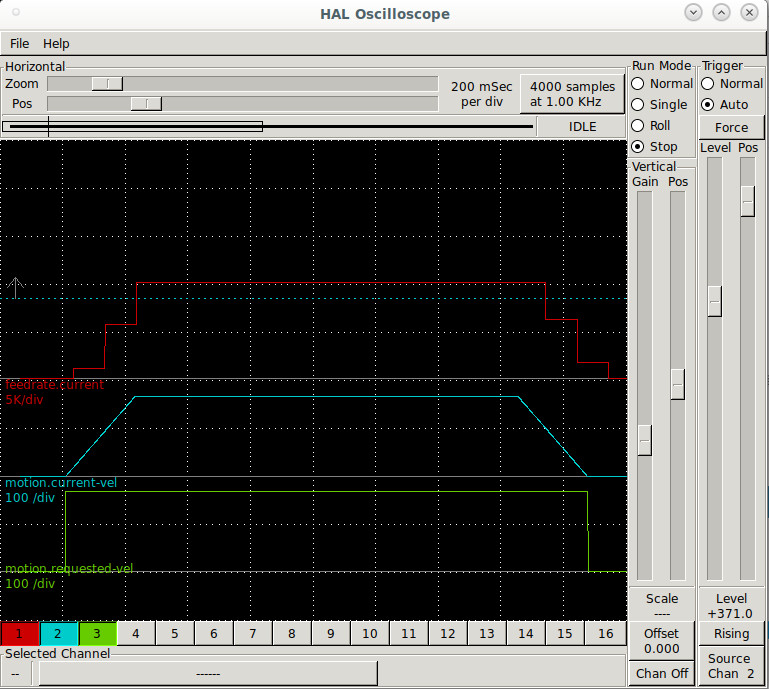
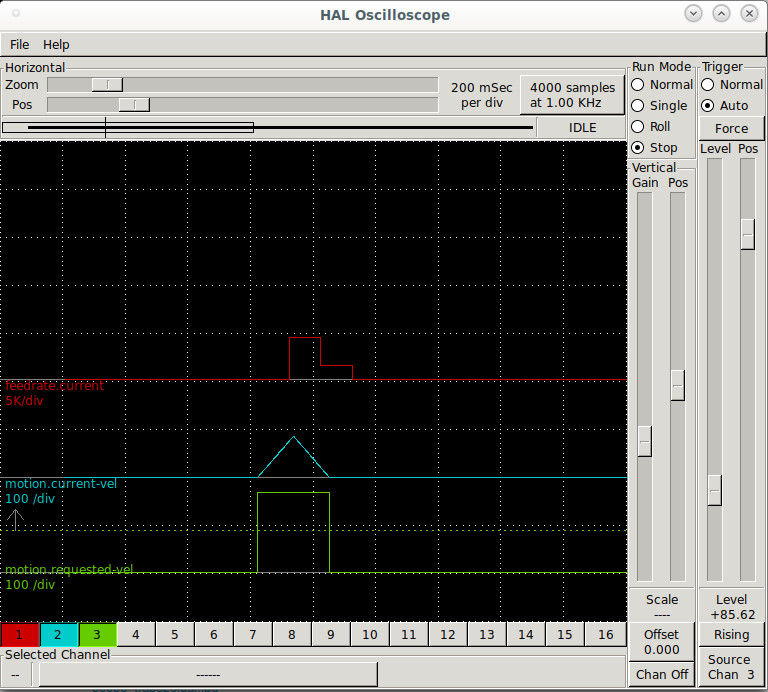
I did a quick check with the hal scope to compare motion.requested-vel, motion.current-vel and feedrate.current.
Given the slow update rate of the feedrate.current pin it seems to follow motion.current-vel.
Given the slow update rate of the feedrate.current pin it seems to follow motion.current-vel.
Attachments:
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 11948
- Thank you received: 4068
03 Jun 2020 09:11 #169927
by rodw
Replied by rodw on topic Is there a Halpin for the current feedrate
I thought that was too easy!
Refer github.com/LinuxCNC/linuxcnc/blob/master/lib/python/hal_glib.py
looks you are getting a copy of motion.current-vel if you search for the message you used.
Statetags are defined in github.com/LinuxCNC/linuxcnc/blob/master...c/motion/state_tag.h
and that structure is included in the structure emcmot_command_t which is defined in motion.h
github.com/LinuxCNC/linuxcnc/blob/master.../emc/motion/motion.h
So it says that a copy of this is included in shared memory so it should be reachable from a python program.
the physical structure is here
github.com/LinuxCNC/linuxcnc/blob/master.../emc/motion/motion.c
So how to use state tags is is not documented anywhere. I wish it was.
Refer github.com/LinuxCNC/linuxcnc/blob/master/lib/python/hal_glib.py
looks you are getting a copy of motion.current-vel if you search for the message you used.
Statetags are defined in github.com/LinuxCNC/linuxcnc/blob/master...c/motion/state_tag.h
and that structure is included in the structure emcmot_command_t which is defined in motion.h
github.com/LinuxCNC/linuxcnc/blob/master.../emc/motion/motion.h
So it says that a copy of this is included in shared memory so it should be reachable from a python program.
the physical structure is here
github.com/LinuxCNC/linuxcnc/blob/master.../emc/motion/motion.c
So how to use state tags is is not documented anywhere. I wish it was.
Please Log in or Create an account to join the conversation.
- Aciera
-
Topic Author
- Offline
- Administrator
-
Less
More
- Posts: 4707
- Thank you received: 2106
03 Jun 2020 12:20 #169935
by Aciera
Replied by Aciera on topic Is there a Halpin for the current feedrate
Hm, I'm somewhat out of my depth here but I wonder if this wasn't to be expected considering we're using a python script instead of a precompiled component written in C.
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 11948
- Thank you received: 4068
03 Jun 2020 12:42 #169936
by rodw
You are not the only one out of your depth! It says its available in shared memory so it should be visible from Python too.
I Wonder what comes back when you run this?
linuxcnc.org/docs/devel/html/config/pyth...ding_linuxcnc_status
Writing components in C is super easy. Grab an example from git hub github.com/LinuxCNC/linuxcnc/tree/master/src/hal/components
and modify it then type: halcompile --install mycomp.comp (if not using run in place you may need sudo)
Replied by rodw on topic Is there a Halpin for the current feedrate
Hm, I'm somewhat out of my depth here but I wonder if this wasn't to be expected considering we're using a python script instead of a precompiled component written in C.
You are not the only one out of your depth! It says its available in shared memory so it should be visible from Python too.
I Wonder what comes back when you run this?
linuxcnc.org/docs/devel/html/config/pyth...ding_linuxcnc_status
Writing components in C is super easy. Grab an example from git hub github.com/LinuxCNC/linuxcnc/tree/master/src/hal/components
and modify it then type: halcompile --install mycomp.comp (if not using run in place you may need sudo)
The following user(s) said Thank You: Aciera
Please Log in or Create an account to join the conversation.
- Aciera
-
Topic Author
- Offline
- Administrator
-
Less
More
- Posts: 4707
- Thank you received: 2106
03 Jun 2020 13:33 - 03 Jun 2020 13:35 #169939
by Aciera
This:
I'd say that is a pretty comprehensive overview of the system.
Replied by Aciera on topic Is there a Halpin for the current feedrate
I Wonder what comes back when you run this?
linuxcnc.org/docs/devel/html/config/pyth...ding_linuxcnc_status
This:
Warning: Spoiler!
acceleration 1e+99
active_queue 0
actual_position (-400.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0)
adaptive_feed_enabled False
ain (0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0)
angular_units 1.0
aout (0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0)
axes 6
axis ({'min_position_limit': -400.0, 'velocity': 0.0, 'max_position_limit': 400.0}, {'min_position_limit': -400.0, 'velocity': 0.0, 'max_position_limit': 400.0}, {'min_position_limit': -400.0, 'velocity': 0.0, 'max_position_limit': 0.001}, {'min_position_limit': 0.0, 'velocity': 0.0, 'max_position_limit': 0.0}, {'min_position_limit': 0.0, 'velocity': 0.0, 'max_position_limit': 0.0}, {'min_position_limit': -1e+99, 'velocity': 0.0, 'max_position_limit': 1e+99}, {'min_position_limit': 0.0, 'velocity': 0.0, 'max_position_limit': 0.0}, {'min_position_limit': 0.0, 'velocity': 0.0, 'max_position_limit': 0.0}, {'min_position_limit': 0.0, 'velocity': 0.0, 'max_position_limit': 0.0})
axis_mask 39
block_delete False
call_level 0
command
current_line 0
current_vel 0.0
cycle_time 0.001
debug 0
delay_left 0.0
din (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0)
distance_to_go 0.0
dout (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0)
dtg (0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0)
echo_serial_number 11
enabled True
estop 0
exec_state 2
feed_hold_enabled True
feed_override_enabled True
feedrate 1.0
file
flood 0
g5x_index 1
g5x_offset (0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0)
g92_offset (0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0)
gcodes (0, 800, -1, 170, 400, 210, 900, 940, 540, 490, 990, 640, -1, 970, 911, 80)
homed (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0)
id 0
inpos True
input_timeout False
interp_state 1
interpreter_errcode 0
joint ({'ferror_current': 0.0, 'max_position_limit': 400.0, 'max_ferror': 0.05, 'inpos': 1, 'ferror_highmark': 400.0, 'jointType': 1, 'units': 1.0, 'input': -400.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 0.01, 'max_hard_limit': 0, 'output': -400.0, 'backlash': 0.0, 'fault': 0, 'enabled': 1, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -400.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 400.0, 'max_ferror': 0.05, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 0.01, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 1, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -400.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 0.001, 'max_ferror': 0.05, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 0.01, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 1, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -400.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1e+99, 'max_ferror': 5.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 2, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 1, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1e+99, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1.0, 'max_ferror': 1.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 0, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1.0, 'max_ferror': 1.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 0, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1.0, 'max_ferror': 1.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 0, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1.0, 'max_ferror': 1.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 0, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1.0, 'max_ferror': 1.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 0, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1.0, 'max_ferror': 1.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 0, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1.0, 'max_ferror': 1.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 0, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1.0, 'max_ferror': 1.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 0, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1.0, 'max_ferror': 1.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 0, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1.0, 'max_ferror': 1.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 0, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1.0, 'max_ferror': 1.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 0, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1.0, 'max_ferror': 1.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 0, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1.0, 'velocity': 0.0})
joint_actual_position (-400.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0)
joint_position (-400.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0)
joints 4
kinematics_type 1
limit (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0)
linear_units 1.0
lube 1
lube_level 0
max_acceleration 1e+99
max_velocity 234.0
mcodes (0, -1, 5, -1, 9, -1, 48, -1, 53, 0)
mist 0
motion_line 0
motion_mode 1
motion_type 0
num_extrajoints 0
optional_stop True
paused False
pocket_prepped -1
poll <built-in method poll of linuxcnc.stat object at 0x16d4890>
position (-400.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0)
probe_tripped False
probe_val 0
probed_position (0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0)
probing False
program_units 2
queue 0
queue_full False
queued_mdi_commands 0
rapidrate 1.0
read_line 0
rotation_xy 0.0
settings (0.0, 0.0, 0.0)
spindle ({'direction': 0L, 'orient_state': 0L, 'enabled': 0L, 'override_enabled': True, 'brake': 1L, 'homed': False, 'override': 1.0, 'speed': 0.0, 'orient_fault': 0L}, {'direction': 0L, 'orient_state': 0L, 'enabled': 0L, 'override_enabled': False, 'brake': 1L, 'homed': False, 'override': 1.0, 'speed': 0.0, 'orient_fault': 0L}, {'direction': 0L, 'orient_state': 0L, 'enabled': 0L, 'override_enabled': False, 'brake': 1L, 'homed': False, 'override': 1.0, 'speed': 0.0, 'orient_fault': 0L}, {'direction': 0L, 'orient_state': 0L, 'enabled': 0L, 'override_enabled': False, 'brake': 1L, 'homed': False, 'override': 1.0, 'speed': 0.0, 'orient_fault': 0L}, {'direction': 0L, 'orient_state': 0L, 'enabled': 0L, 'override_enabled': False, 'brake': 1L, 'homed': False, 'override': 1.0, 'speed': 0.0, 'orient_fault': 0L}, {'direction': 0L, 'orient_state': 0L, 'enabled': 0L, 'override_enabled': False, 'brake': 1L, 'homed': False, 'override': 1.0, 'speed': 0.0, 'orient_fault': 0L}, {'direction': 0L, 'orient_state': 0L, 'enabled': 0L, 'override_enabled': False, 'brake': 1L, 'homed': False, 'override': 1.0, 'speed': 0.0, 'orient_fault': 0L}, {'direction': 0L, 'orient_state': 0L, 'enabled': 0L, 'override_enabled': False, 'brake': 1L, 'homed': False, 'override': 1.0, 'speed': 0.0, 'orient_fault': 0L})
spindles 1
state 1
task_mode 1
task_paused 0
task_state 4
tool_in_spindle 0
tool_offset (0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0)
tool_table (tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=1, xoffset=0.0, yoffset=0.0, zoffset=-12.712898, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=1.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=2, xoffset=0.0, yoffset=0.0, zoffset=-0.01, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=2.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=3, xoffset=0.0, yoffset=0.0, zoffset=33.387662, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=3.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=4, xoffset=0.0, yoffset=0.0, zoffset=-10.173678, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=4.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=5, xoffset=0.0, yoffset=0.0, zoffset=18.979573, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=5.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=6, xoffset=0.0, yoffset=0.0, zoffset=-5.125198, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=7.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=7, xoffset=0.0, yoffset=0.0, zoffset=-1.07, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=7.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=8, xoffset=0.0, yoffset=0.0, zoffset=-1.16, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=8.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=9, xoffset=0.0, yoffset=0.0, zoffset=-1.14, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=9.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=10, xoffset=0.0, yoffset=0.0, zoffset=-1.13, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=10.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=11, xoffset=0.0, yoffset=0.0, zoffset=-0.09, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=11.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=12, xoffset=0.0, yoffset=0.0, zoffset=-1.12, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=12.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=13, xoffset=0.0, yoffset=0.0, zoffset=-0.02, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=13.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=14, xoffset=0.0, yoffset=0.0, zoffset=-0.04, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=14.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=15, xoffset=0.0, yoffset=0.0, zoffset=-0.1, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=15.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=16, xoffset=0.0, yoffset=0.0, zoffset=-0.03, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=16.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=18, xoffset=0.0, yoffset=0.0, zoffset=-1.18, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=18.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0))
velocity 0.0
active_queue 0
actual_position (-400.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0)
adaptive_feed_enabled False
ain (0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0)
angular_units 1.0
aout (0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0)
axes 6
axis ({'min_position_limit': -400.0, 'velocity': 0.0, 'max_position_limit': 400.0}, {'min_position_limit': -400.0, 'velocity': 0.0, 'max_position_limit': 400.0}, {'min_position_limit': -400.0, 'velocity': 0.0, 'max_position_limit': 0.001}, {'min_position_limit': 0.0, 'velocity': 0.0, 'max_position_limit': 0.0}, {'min_position_limit': 0.0, 'velocity': 0.0, 'max_position_limit': 0.0}, {'min_position_limit': -1e+99, 'velocity': 0.0, 'max_position_limit': 1e+99}, {'min_position_limit': 0.0, 'velocity': 0.0, 'max_position_limit': 0.0}, {'min_position_limit': 0.0, 'velocity': 0.0, 'max_position_limit': 0.0}, {'min_position_limit': 0.0, 'velocity': 0.0, 'max_position_limit': 0.0})
axis_mask 39
block_delete False
call_level 0
command
current_line 0
current_vel 0.0
cycle_time 0.001
debug 0
delay_left 0.0
din (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0)
distance_to_go 0.0
dout (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0)
dtg (0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0)
echo_serial_number 11
enabled True
estop 0
exec_state 2
feed_hold_enabled True
feed_override_enabled True
feedrate 1.0
file
flood 0
g5x_index 1
g5x_offset (0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0)
g92_offset (0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0)
gcodes (0, 800, -1, 170, 400, 210, 900, 940, 540, 490, 990, 640, -1, 970, 911, 80)
homed (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0)
id 0
inpos True
input_timeout False
interp_state 1
interpreter_errcode 0
joint ({'ferror_current': 0.0, 'max_position_limit': 400.0, 'max_ferror': 0.05, 'inpos': 1, 'ferror_highmark': 400.0, 'jointType': 1, 'units': 1.0, 'input': -400.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 0.01, 'max_hard_limit': 0, 'output': -400.0, 'backlash': 0.0, 'fault': 0, 'enabled': 1, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -400.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 400.0, 'max_ferror': 0.05, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 0.01, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 1, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -400.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 0.001, 'max_ferror': 0.05, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 0.01, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 1, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -400.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1e+99, 'max_ferror': 5.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 2, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 1, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1e+99, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1.0, 'max_ferror': 1.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 0, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1.0, 'max_ferror': 1.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 0, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1.0, 'max_ferror': 1.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 0, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1.0, 'max_ferror': 1.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 0, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1.0, 'max_ferror': 1.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 0, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1.0, 'max_ferror': 1.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 0, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1.0, 'max_ferror': 1.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 0, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1.0, 'max_ferror': 1.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 0, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1.0, 'max_ferror': 1.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 0, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1.0, 'max_ferror': 1.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 0, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1.0, 'max_ferror': 1.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 0, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1.0, 'velocity': 0.0}, {'ferror_current': 0.0, 'max_position_limit': 1.0, 'max_ferror': 1.0, 'inpos': 1, 'ferror_highmark': 0.0, 'jointType': 1, 'units': 1.0, 'input': 0.0, 'min_soft_limit': 0, 'min_hard_limit': 0, 'homing': 0, 'min_ferror': 1.0, 'max_hard_limit': 0, 'output': 0.0, 'backlash': 0.0, 'fault': 0, 'enabled': 0, 'max_soft_limit': 0, 'override_limits': 0, 'homed': 0, 'min_position_limit': -1.0, 'velocity': 0.0})
joint_actual_position (-400.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0)
joint_position (-400.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0)
joints 4
kinematics_type 1
limit (0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0)
linear_units 1.0
lube 1
lube_level 0
max_acceleration 1e+99
max_velocity 234.0
mcodes (0, -1, 5, -1, 9, -1, 48, -1, 53, 0)
mist 0
motion_line 0
motion_mode 1
motion_type 0
num_extrajoints 0
optional_stop True
paused False
pocket_prepped -1
poll <built-in method poll of linuxcnc.stat object at 0x16d4890>
position (-400.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0)
probe_tripped False
probe_val 0
probed_position (0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0)
probing False
program_units 2
queue 0
queue_full False
queued_mdi_commands 0
rapidrate 1.0
read_line 0
rotation_xy 0.0
settings (0.0, 0.0, 0.0)
spindle ({'direction': 0L, 'orient_state': 0L, 'enabled': 0L, 'override_enabled': True, 'brake': 1L, 'homed': False, 'override': 1.0, 'speed': 0.0, 'orient_fault': 0L}, {'direction': 0L, 'orient_state': 0L, 'enabled': 0L, 'override_enabled': False, 'brake': 1L, 'homed': False, 'override': 1.0, 'speed': 0.0, 'orient_fault': 0L}, {'direction': 0L, 'orient_state': 0L, 'enabled': 0L, 'override_enabled': False, 'brake': 1L, 'homed': False, 'override': 1.0, 'speed': 0.0, 'orient_fault': 0L}, {'direction': 0L, 'orient_state': 0L, 'enabled': 0L, 'override_enabled': False, 'brake': 1L, 'homed': False, 'override': 1.0, 'speed': 0.0, 'orient_fault': 0L}, {'direction': 0L, 'orient_state': 0L, 'enabled': 0L, 'override_enabled': False, 'brake': 1L, 'homed': False, 'override': 1.0, 'speed': 0.0, 'orient_fault': 0L}, {'direction': 0L, 'orient_state': 0L, 'enabled': 0L, 'override_enabled': False, 'brake': 1L, 'homed': False, 'override': 1.0, 'speed': 0.0, 'orient_fault': 0L}, {'direction': 0L, 'orient_state': 0L, 'enabled': 0L, 'override_enabled': False, 'brake': 1L, 'homed': False, 'override': 1.0, 'speed': 0.0, 'orient_fault': 0L}, {'direction': 0L, 'orient_state': 0L, 'enabled': 0L, 'override_enabled': False, 'brake': 1L, 'homed': False, 'override': 1.0, 'speed': 0.0, 'orient_fault': 0L})
spindles 1
state 1
task_mode 1
task_paused 0
task_state 4
tool_in_spindle 0
tool_offset (0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0)
tool_table (tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=1, xoffset=0.0, yoffset=0.0, zoffset=-12.712898, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=1.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=2, xoffset=0.0, yoffset=0.0, zoffset=-0.01, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=2.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=3, xoffset=0.0, yoffset=0.0, zoffset=33.387662, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=3.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=4, xoffset=0.0, yoffset=0.0, zoffset=-10.173678, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=4.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=5, xoffset=0.0, yoffset=0.0, zoffset=18.979573, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=5.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=6, xoffset=0.0, yoffset=0.0, zoffset=-5.125198, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=7.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=7, xoffset=0.0, yoffset=0.0, zoffset=-1.07, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=7.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=8, xoffset=0.0, yoffset=0.0, zoffset=-1.16, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=8.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=9, xoffset=0.0, yoffset=0.0, zoffset=-1.14, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=9.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=10, xoffset=0.0, yoffset=0.0, zoffset=-1.13, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=10.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=11, xoffset=0.0, yoffset=0.0, zoffset=-0.09, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=11.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=12, xoffset=0.0, yoffset=0.0, zoffset=-1.12, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=12.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=13, xoffset=0.0, yoffset=0.0, zoffset=-0.02, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=13.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=14, xoffset=0.0, yoffset=0.0, zoffset=-0.04, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=14.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=15, xoffset=0.0, yoffset=0.0, zoffset=-0.1, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=15.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=16, xoffset=0.0, yoffset=0.0, zoffset=-0.03, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=16.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=18, xoffset=0.0, yoffset=0.0, zoffset=-1.18, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=18.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0), tool_result(id=-1, xoffset=0.0, yoffset=0.0, zoffset=0.0, aoffset=0.0, boffset=0.0, coffset=0.0, uoffset=0.0, voffset=0.0, woffset=0.0, diameter=0.0, frontangle=0.0, backangle=0.0, orientation=0))
velocity 0.0
I'd say that is a pretty comprehensive overview of the system.
Last edit: 03 Jun 2020 13:35 by Aciera.
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 11948
- Thank you received: 4068
03 Jun 2020 14:08 #169941
by rodw
Replied by rodw on topic Is there a Halpin for the current feedrate
Well, I've been digging through the code and came up with these variables in the state tags as being the ones we want.
When I am near my machine again, I Was going to try creating an external variable inside a component. But its midnight here...
emcmotStatus->tag->fields-float[GM_FIELD_FLOAT_LINE_NUMBER]
emcmotStatus->tag->fields-float[GM_FIELD_FLOAT_FEED]
emcmotStatus->tag->fields-float[GM_FIELD_FLOAT_SPEED]When I am near my machine again, I Was going to try creating an external variable inside a component. But its midnight here...
The following user(s) said Thank You: Aciera
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 11948
- Thank you received: 4068
03 Jun 2020 14:11 #169942
by rodw
Replied by rodw on topic Is there a Halpin for the current feedrate
I was hoping you might see a structure similar to the state tags, but it does not seem so. I'd say the python structure needs updating.
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 11948
- Thank you received: 4068
07 Jun 2020 01:47 - 07 Jun 2020 01:48 #170433
by rodw
Replied by rodw on topic Is there a Halpin for the current feedrate
Well I made some progress pulling out state tags data using the debug pins This is using the default axis metric sim.
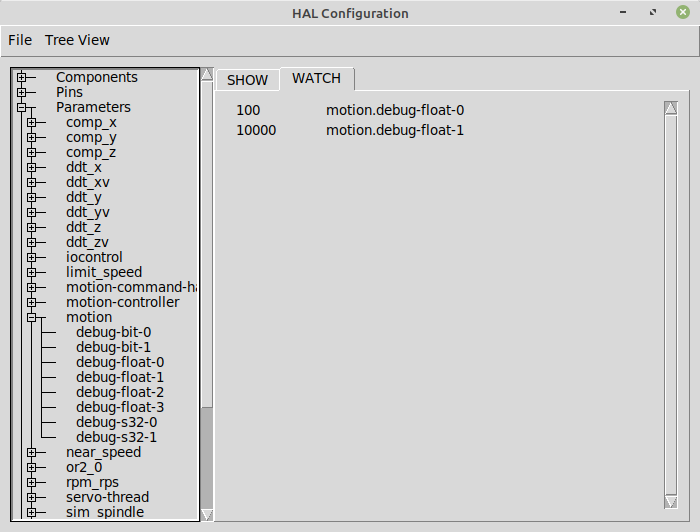
Note these are parameters, not pins, so open the correct section in halshow. The first entry is the feed rate, second entry is spindle speed
In /src/emc/motion..c around line 1937 make these changes (The first two lines need to be added, then the last two need to be modified
I think I know now how to add dedicated pins for the state tags now so I''ll keep playing with this.
Note these are parameters, not pins, so open the correct section in halshow. The first entry is the feed rate, second entry is spindle speed
In /src/emc/motion..c around line 1937 make these changes (The first two lines need to be added, then the last two need to be modified
struct state_tag_t *tag;
tag = &emcmotStatus->tag;
emcmot_hal_data->debug_float_0 = tag->fields_float[GM_FIELD_FLOAT_FEED];
emcmot_hal_data->debug_float_1 = tag->fields_float[GM_FIELD_FLOAT_SPEED];I think I know now how to add dedicated pins for the state tags now so I''ll keep playing with this.
Last edit: 07 Jun 2020 01:48 by rodw.
The following user(s) said Thank You: Aciera
Please Log in or Create an account to join the conversation.
Time to create page: 0.810 seconds