jerk limited trajectory planner HAL component
- cmorley
- Offline
- Moderator
-

Less
More
- Posts: 7320
- Thank you received: 2147
28 Sep 2020 08:18 #184119
by cmorley
jerk limited trajectory planner HAL component was created by cmorley
I was interested to test how much a jerk limited tp would help with a large Okuma lathe I have.
I found there were several attempts by micge to put a jerk limited tp in linuxcnc before the look ahead planner was added.
I've pulled out the code from micges/scurve-test2 and made it into a HAL component.
I had done this with the simple_tp for pncconf axis testing - if I could get this to work, I could use pncconf to test the differences.
For now I just made a test panel to run it.
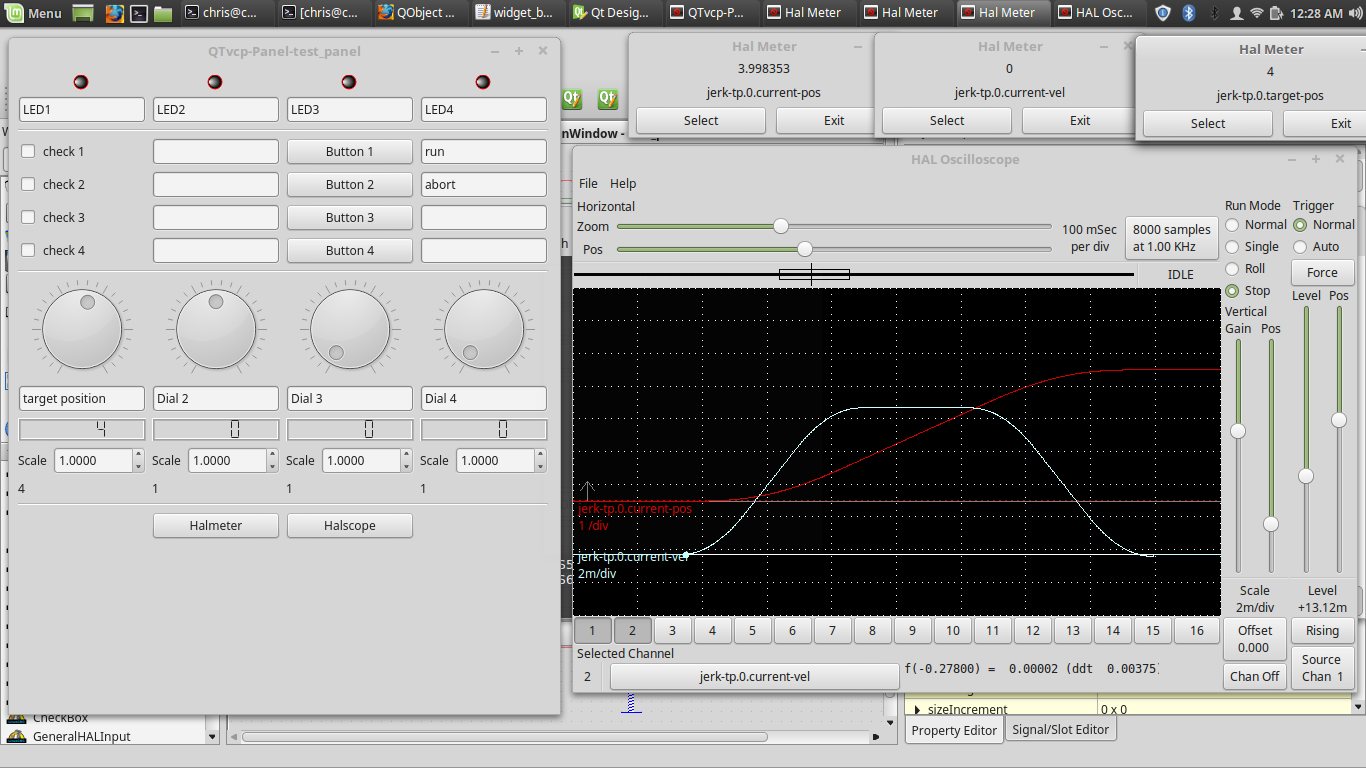
You can see at the end it didn't quite finish properly - looks like negative velocity - and it doesn't quite hit target.
But the other problem is I don't see how on can change the target while it's in motion.
Calling the jogging function resets the state of the planner to the beginning.
I had to add a oneshot to stop it from trying to continuously jog (it would continuously move the target)
Not sure if I can move this any further.
hee it is for anyone interested.
I found there were several attempts by micge to put a jerk limited tp in linuxcnc before the look ahead planner was added.
I've pulled out the code from micges/scurve-test2 and made it into a HAL component.
I had done this with the simple_tp for pncconf axis testing - if I could get this to work, I could use pncconf to test the differences.
For now I just made a test panel to run it.
You can see at the end it didn't quite finish properly - looks like negative velocity - and it doesn't quite hit target.
But the other problem is I don't see how on can change the target while it's in motion.
Calling the jogging function resets the state of the planner to the beginning.
I had to add a oneshot to stop it from trying to continuously jog (it would continuously move the target)
Not sure if I can move this any further.
hee it is for anyone interested.
Please Log in or Create an account to join the conversation.
- rodw
-

- Offline
- Platinum Member
-

Less
More
- Posts: 11975
- Thank you received: 4080
28 Sep 2020 08:56 #184125
by rodw
Replied by rodw on topic jerk limited trajectory planner HAL component
Looks great. Have you seen this thread?
forum.linuxcnc.org/38-general-linuxcnc-q...city-profile?start=0
It may give you another way forward.
forum.linuxcnc.org/38-general-linuxcnc-q...city-profile?start=0
It may give you another way forward.
Please Log in or Create an account to join the conversation.
- grijalvap
-

- Offline
- Elite Member
-

Less
More
- Posts: 200
- Thank you received: 63
03 Oct 2020 20:58 #184727
by grijalvap
Replied by grijalvap on topic jerk limited trajectory planner HAL component
It looks great let me know if you want test any code, I think the component aproach can be good
Please Log in or Create an account to join the conversation.
Time to create page: 0.153 seconds