HAL CiA402 Drive Interface for Can Bus,Ethercat etc...
- Hakan
- Offline
- Platinum Member
-

Less
More
- Posts: 1317
- Thank you received: 453
08 Jun 2025 12:12 #329942
by Hakan
Replied by Hakan on topic HAL CiA402 Drive Interface for Can Bus,Ethercat etc...
Sounds great!
What are your plans with this?
Keep it separate in your code or bring it into mainstream linuxcnc code?
What are your plans with this?
Keep it separate in your code or bring it into mainstream linuxcnc code?
The following user(s) said Thank You: Grotius
Please Log in or Create an account to join the conversation.
- Grotius
-

- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
08 Jun 2025 13:52 #329947
by Grotius
Replied by Grotius on topic HAL CiA402 Drive Interface for Can Bus,Ethercat etc...
Others may bring it in the main stream.
I am against one off the github policys.
Therefore i stay at Codeberg wich dont use the policy i hate.
I am against one off the github policys.
Therefore i stay at Codeberg wich dont use the policy i hate.
Please Log in or Create an account to join the conversation.
- Marko6
- Offline
- New Member
-

Less
More
- Posts: 8
- Thank you received: 0
28 Jun 2025 18:05 #330967
by Marko6
Replied by Marko6 on topic HAL CiA402 Drive Interface for Can Bus,Ethercat etc...
Hi everyone.
Does anyone have CSV mode working? I'm running CSP on XYZ without any problems, but CSV on the spindle is just running the drive (Delta C2000 + Ethercat + Encoder) and I can't send the speed/direction signal.
I've spent two days trying to get it running, but to no avail. Also, there is no sample hal/ini file that explains CSV and the spindle.
Thank you. BR,
Pavel
Does anyone have CSV mode working? I'm running CSP on XYZ without any problems, but CSV on the spindle is just running the drive (Delta C2000 + Ethercat + Encoder) and I can't send the speed/direction signal.
I've spent two days trying to get it running, but to no avail. Also, there is no sample hal/ini file that explains CSV and the spindle.
Thank you. BR,
Pavel
Please Log in or Create an account to join the conversation.
- Marko6
- Offline
- New Member
-
Less
More
- Posts: 8
- Thank you received: 0
07 Jul 2025 19:56 #331481
by Marko6
Replied by Marko6 on topic HAL CiA402 Drive Interface for Can Bus,Ethercat etc...
Hi everyone. I have made some progress on 3x Lichuan + 1x Delta C2000. Now I am able to measure the speed when the drive is turned on manually. But still no success with the speed command.
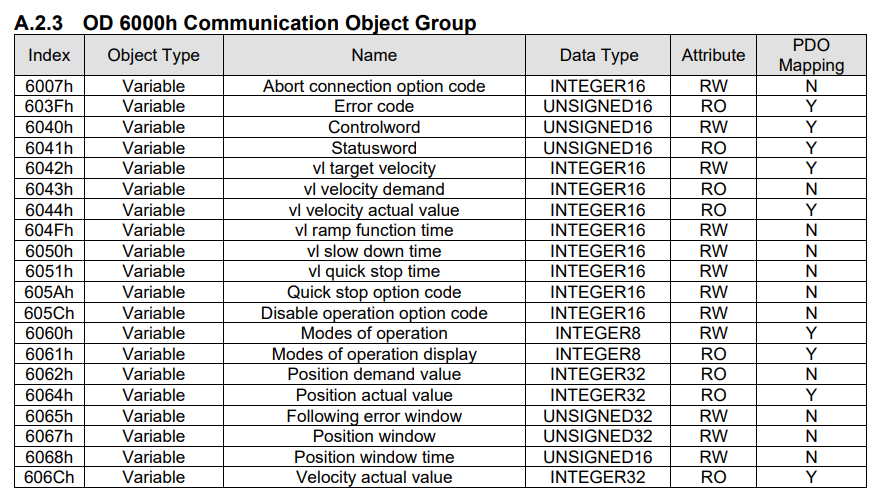
I found that the speed command in HAL CiA402 is 60FF and here in Delta it is 6042. I have tried both, but when I set only 6042 in the XML file, I am not even able to turn on the drive.
Any idea? Thank you.
I found that the speed command in HAL CiA402 is 60FF and here in Delta it is 6042. I have tried both, but when I set only 6042 in the XML file, I am not even able to turn on the drive.
Any idea? Thank you.
Attachments:
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-
Less
More
- Posts: 1317
- Thank you received: 453
07 Jul 2025 20:18 - 07 Jul 2025 20:22 #331484
by Hakan
Replied by Hakan on topic HAL CiA402 Drive Interface for Can Bus,Ethercat etc...
Is that the Delta 2000 CMC-EC01?
There is a manual for download includes a speed demo example.
downloadcenter.deltaww.com/en-US/Downloa...=cdate&sort_dir=DESC
There is a manual for download includes a speed demo example.
downloadcenter.deltaww.com/en-US/Downloa...=cdate&sort_dir=DESC
Last edit: 07 Jul 2025 20:22 by Hakan.
Please Log in or Create an account to join the conversation.
- Marko6
- Offline
- New Member
-
Less
More
- Posts: 8
- Thank you received: 0
07 Jul 2025 21:12 #331491
by Marko6
Replied by Marko6 on topic HAL CiA402 Drive Interface for Can Bus,Ethercat etc...
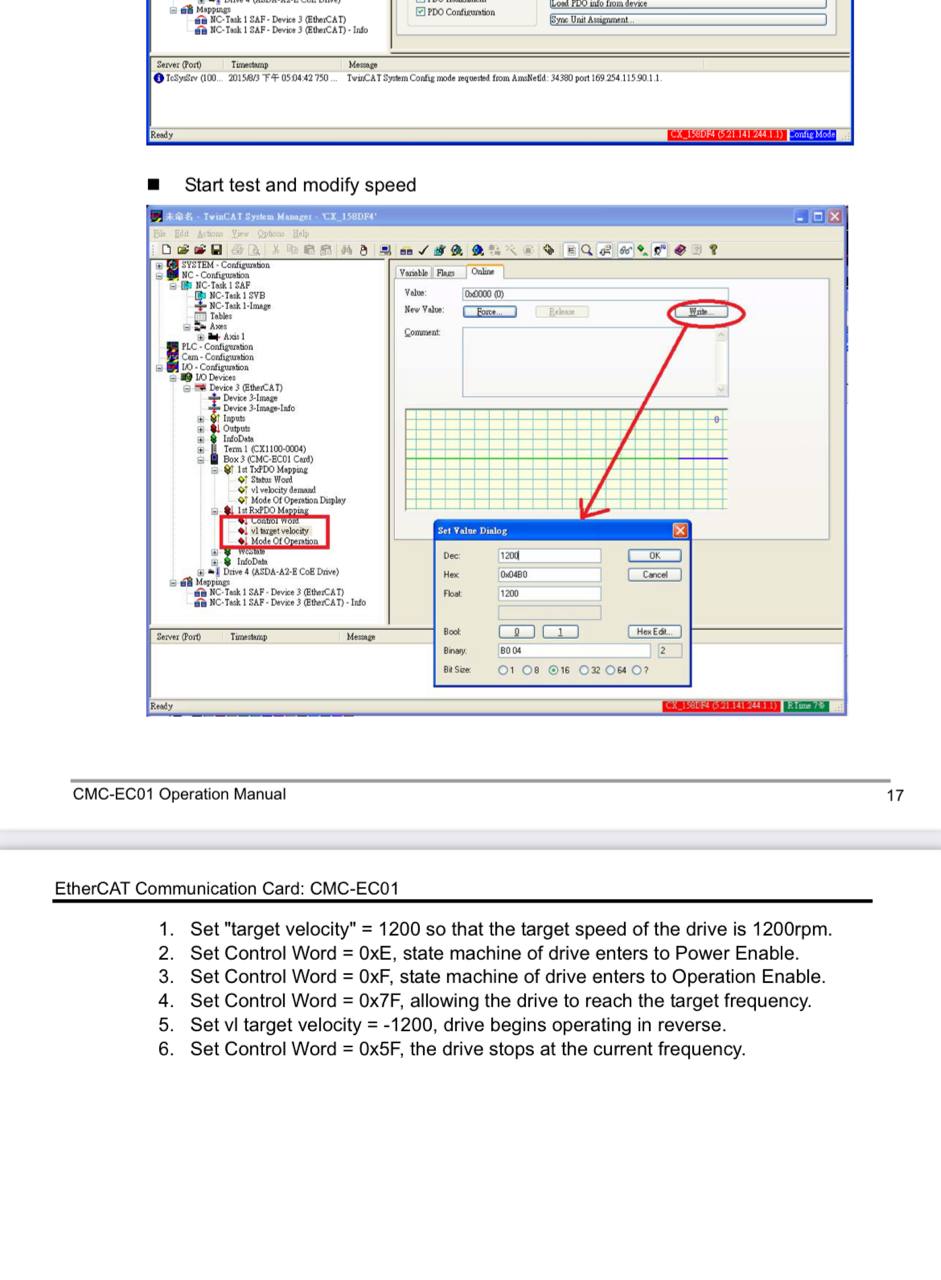
Hi. Yes, but no.
Speed tutorial is there but its just procedure what to send to drive. I have no clue how to implement that to Linuxcnc.
Thank you.
Speed tutorial is there but its just procedure what to send to drive. I have no clue how to implement that to Linuxcnc.
Thank you.
Attachments:
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-
Less
More
- Posts: 1317
- Thank you received: 453
08 Jul 2025 06:43 - 09 Jul 2025 05:11 #331504
by Hakan
Replied by Hakan on topic HAL CiA402 Drive Interface for Can Bus,Ethercat etc...
Yeah, it seems you can't do that with the standard cia402 component.
It only support csp mode(1) and possibly csv(0), and what I read your device is working in asynchronous velocity mode(2) and that's not supported at least fully.
It's the controlword, obviously, that starts and stops the motor.
Normally the cia402 component has full control over the controlword and that must be now manipulated by setting on and off bit 4-6 (7F vs 0F) for start stop
There is the option to modify the cia402 component, but maybe "easier" to manipulate the controlword
between cia402 component and lcec.
Break the connection between cia402 and lcec controlword and insert something like
if op-enabled (controlword bit 0-3 set) and start pin (new pin)
set controlword bit 4-6 true
else
set controlword bit 4-6 false
with hal logic. The resulting controlword connects to lcec.
In addition to that, don't connect any of the cia402 commanded or feedback pins, do the speed setting and speed feedback outside the cia402 component. Basically, the cia402 component will bring the device to op-enabled, that's all. You set the op-mode and all speed settings directly to lcec.
It only support csp mode(1) and possibly csv(0), and what I read your device is working in asynchronous velocity mode(2) and that's not supported at least fully.
It's the controlword, obviously, that starts and stops the motor.
Normally the cia402 component has full control over the controlword and that must be now manipulated by setting on and off bit 4-6 (7F vs 0F) for start stop
There is the option to modify the cia402 component, but maybe "easier" to manipulate the controlword
between cia402 component and lcec.
Break the connection between cia402 and lcec controlword and insert something like
if op-enabled (controlword bit 0-3 set) and start pin (new pin)
set controlword bit 4-6 true
else
set controlword bit 4-6 false
with hal logic. The resulting controlword connects to lcec.
In addition to that, don't connect any of the cia402 commanded or feedback pins, do the speed setting and speed feedback outside the cia402 component. Basically, the cia402 component will bring the device to op-enabled, that's all. You set the op-mode and all speed settings directly to lcec.
Last edit: 09 Jul 2025 05:11 by Hakan. Reason: Fixed 7F and 0F conversion to bits
The following user(s) said Thank You: Marko6
Please Log in or Create an account to join the conversation.
- Marko6
- Offline
- New Member
-
Less
More
- Posts: 8
- Thank you received: 0
08 Jul 2025 16:39 #331534
by Marko6
Replied by Marko6 on topic HAL CiA402 Drive Interface for Can Bus,Ethercat etc...
Hi. Thanks for the help. It works now. It's not finished yet, but it's a good start.
Here are my files, maybe someone will like it.")
BR Pavel
Here are my files, maybe someone will like it.
BR Pavel
Attachments:
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-
Less
More
- Posts: 1317
- Thank you received: 453
08 Jul 2025 17:22 - 08 Jul 2025 17:34 #331536
by Hakan
Replied by Hakan on topic HAL CiA402 Drive Interface for Can Bus,Ethercat etc...
Looks great!
A new component for the logic, even the easiest way.
Btw, I noticed my hex to bin conversion was totally wrong, but you get the point with 7F and 0F.
A new component for the logic, even the easiest way.
Btw, I noticed my hex to bin conversion was totally wrong, but you get the point with 7F and 0F.
Last edit: 08 Jul 2025 17:34 by Hakan.
Please Log in or Create an account to join the conversation.
Time to create page: 0.263 seconds