Configuring 6 axis robot arm with lcnc
- Wagon56
- Offline
- New Member
-

Less
More
- Posts: 11
- Thank you received: 3
20 Mar 2025 12:42 #324355
by Wagon56
Configuring 6 axis robot arm with lcnc was created by Wagon56
Hey, i have a question about configuring a 6axis robot arm with lcnc, ive built myself a robot arm and im trying to control it via a puma560 simulation config, ive seen a youtube short of someone doing exactly that but he has no documentation on how he did it, im new to lcnc so i dont really know where to start with configuring physical pins, for context im using a rpi5 and want to use gpio pins for step/dir, ive got some tmc 5160t drivers to work and i get motion from them i just dont know how i would assign physical gpio pins to the already existing config Below ive linked the short where a robot arm is controlled by the puma560 config, if you stop at the right time you can see the tab name: youtube.com/shorts/js6OaVhUN2U?si=68d75rJqwbvCr9V0
The following user(s) said Thank You: elovalvo
Please Log in or Create an account to join the conversation.
- ContinenteCNC
-

- Offline
- Premium Member
-

Less
More
- Posts: 97
- Thank you received: 44
22 Mar 2025 14:43 - 22 Mar 2025 14:51 #324555
by ContinenteCNC
Replied by ContinenteCNC on topic Configuring 6 axis robot arm with lcnc
You have a steep learning curve ahead.
Do you have the robot arm to test with?
If not, you should start with a 3 axis pen ploter to get things going. Then you move to genserkins kinematics.
linuxcnc.org/docs/html/man/man9/kins.9.h...trivial%20kinematics
Linux CNC has excellent documentation. I suggest you to get things started and comeback with a more specific problem.
Try a tutorial like this one:
After learning about stepconf wizard, it will come handy to learn how to use hal, if you need to customize something down the road.
linuxcnc.org/docs/html/hal/basic-hal.html
Do you have the robot arm to test with?
If not, you should start with a 3 axis pen ploter to get things going. Then you move to genserkins kinematics.
linuxcnc.org/docs/html/man/man9/kins.9.h...trivial%20kinematics
Linux CNC has excellent documentation. I suggest you to get things started and comeback with a more specific problem.
Try a tutorial like this one:
After learning about stepconf wizard, it will come handy to learn how to use hal, if you need to customize something down the road.
linuxcnc.org/docs/html/hal/basic-hal.html
Last edit: 22 Mar 2025 14:51 by ContinenteCNC.
Please Log in or Create an account to join the conversation.
- Wagon56
- Offline
- New Member
-
Less
More
- Posts: 11
- Thank you received: 3
31 Mar 2025 16:44 #325412
by Wagon56
Replied by Wagon56 on topic Configuring 6 axis robot arm with lcnc
Hey, yeah its been an insane learning curve but im happy to say i figured it out, i have the robot arm pretty much working at the moment, got 6 tmc 5160 drivers connected to the PI5 and am using an arduino for SPI to configure the drivers (i wouldnt have enough pins for toolheads if i used the Pi's SPI interface). Right now all i need to figure out is the DH parameters of the arm itself and some scaling stuff but that shouldnt be too difficult, i had another question though, is it a good idea atall to run 6 stepper motors with step/dir controls using the pi5? im not sure if its powerful enough to do it consistently, i get movement on all the motors with no problem i just dont know how reliable thats gonna be in the long run, maybe running the tmc5160's in SPI mode would be easier if i were to let them do their own stepgen, that would be a whole other learning process too although it might be better
Please Log in or Create an account to join the conversation.
- ContinenteCNC
-
- Offline
- Premium Member
-
Less
More
- Posts: 97
- Thank you received: 44
01 Apr 2025 00:56 - 01 Apr 2025 00:57 #325439
by ContinenteCNC
Replied by ContinenteCNC on topic Configuring 6 axis robot arm with lcnc
Congratulations on your results so far.
I have never tryied LinuxCNC in Raspberry Pi. But, based on my experience in PC based LCNC, I don't think you will ever have any reliability issues running it in step/dir. LinuxCNC is a hell of a reliable motion controller.
I have never tryied LinuxCNC in Raspberry Pi. But, based on my experience in PC based LCNC, I don't think you will ever have any reliability issues running it in step/dir. LinuxCNC is a hell of a reliable motion controller.
Last edit: 01 Apr 2025 00:57 by ContinenteCNC.
The following user(s) said Thank You: Wagon56
Please Log in or Create an account to join the conversation.
- 3404gerber
- Offline
- Senior Member
-

Less
More
- Posts: 49
- Thank you received: 13
20 Apr 2025 20:13 #326773
by 3404gerber
Replied by 3404gerber on topic Configuring 6 axis robot arm with lcnc
Hi,
I'm currently playing with TMC5160 on Linuxcnc in full SPI mode and am happy with the result. Just received a pcb to stack 6 of them on a Pi Hat: (well, on a Radxa zero 3E on the picture)
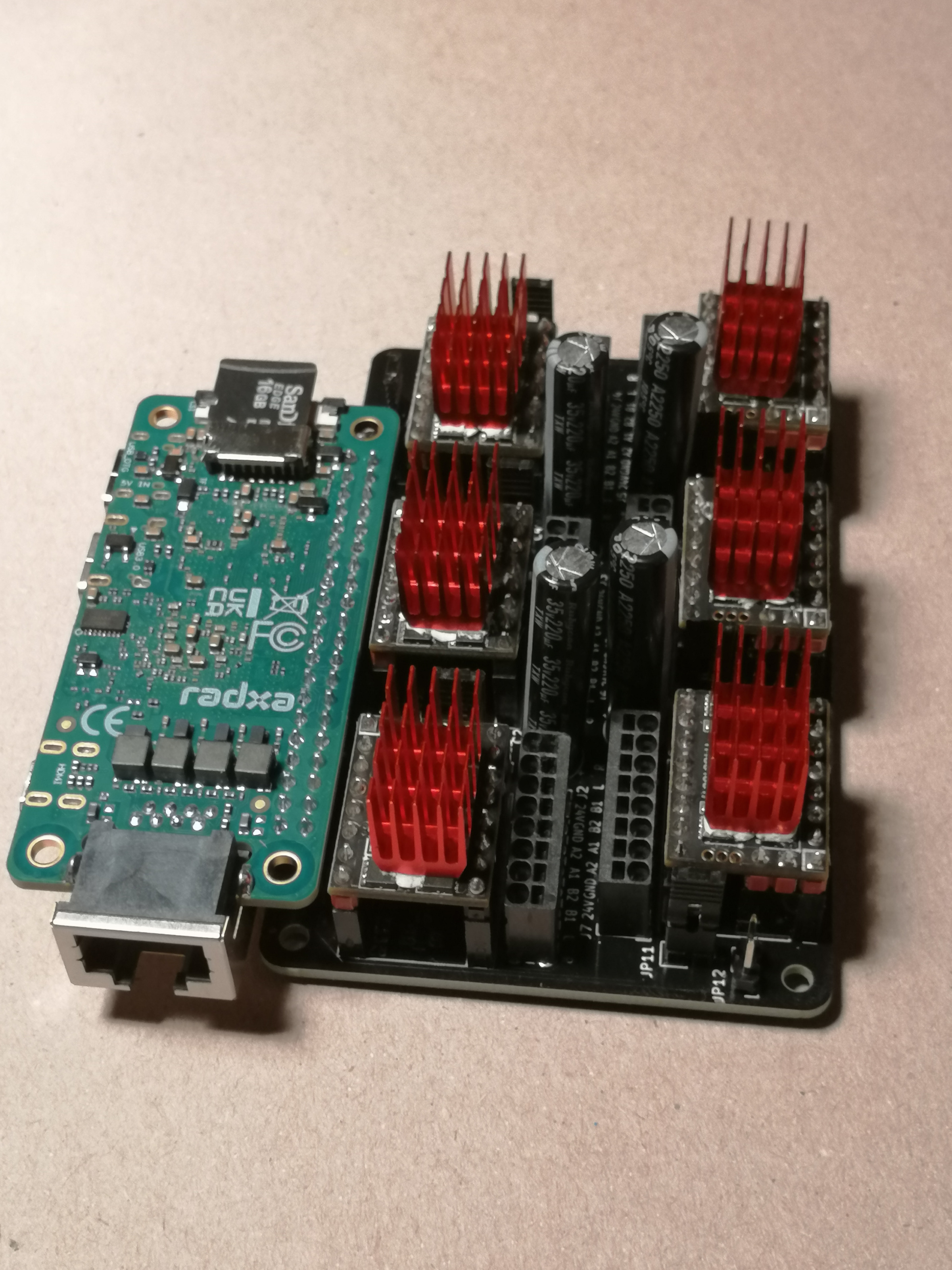
You only use 5 pins from the PI, so plenty left for other stuff. I also added the possibility to connect two 24V end switches directly on the TMC's. And a clock signal generator is on the pcb, so the TMC's share a 16MHz clock, which means better sync and faster SPI communication.
I'm currently playing with TMC5160 on Linuxcnc in full SPI mode and am happy with the result. Just received a pcb to stack 6 of them on a Pi Hat: (well, on a Radxa zero 3E on the picture)
You only use 5 pins from the PI, so plenty left for other stuff. I also added the possibility to connect two 24V end switches directly on the TMC's. And a clock signal generator is on the pcb, so the TMC's share a 16MHz clock, which means better sync and faster SPI communication.
Attachments:
The following user(s) said Thank You: ContinenteCNC
Please Log in or Create an account to join the conversation.
Time to create page: 0.105 seconds