Bare bones lathe conversion
- joe523
- Offline
- New Member
-

Less
More
- Posts: 4
- Thank you received: 0
25 Sep 2015 05:30 - 25 Sep 2015 05:33 #62960
by joe523
Bare bones lathe conversion was created by joe523
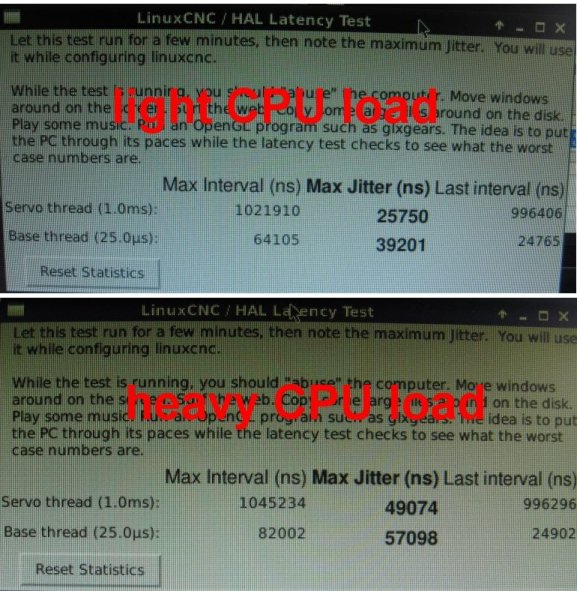
I am wondering if linuxcnc can do low rpm threading with just software and a low count spindle encoder and no external encoder counter hardware involved. In my reading I have not found anything that relates latency test results with encoder counting ability.
I realize the Mesa 5i25 + 7i76 would be the deluxe path but please hear me out. The discussion may be of use to others if only to warn them away from my path.
I have a typical bench top lathe already converted with a common setup. Mach 3 is interfaced through a PMDX 122 to Gecko 201 and steppers. Spindle is powered by a 2hp motor + VFD. Spindle control is manual with just e-stop, start-stop buttons, forward-reverse switch and a pot for spindle speed. So far the Mach control has just been used for manual jogging, no real CNC. I understand Mach is not robust for lathe control.
The spindle motor drives a double reduction belt drive with two ranges. In the low range the low speed torque is excellent and so I imagine threading can be done at fairly low rpm. Can linuxcnc keep track of a low count spindle encoder at low rpm without the assistance of something like the Mesa boards? How low can the spindle encoder count be and still give adequate threading capability? Is this futile? I think the Mesa boards are a good value but the budget is pretty tight right now. Thanks for any guidance.
Below is the results of my latency test.
I realize the Mesa 5i25 + 7i76 would be the deluxe path but please hear me out. The discussion may be of use to others if only to warn them away from my path.
I have a typical bench top lathe already converted with a common setup. Mach 3 is interfaced through a PMDX 122 to Gecko 201 and steppers. Spindle is powered by a 2hp motor + VFD. Spindle control is manual with just e-stop, start-stop buttons, forward-reverse switch and a pot for spindle speed. So far the Mach control has just been used for manual jogging, no real CNC. I understand Mach is not robust for lathe control.
The spindle motor drives a double reduction belt drive with two ranges. In the low range the low speed torque is excellent and so I imagine threading can be done at fairly low rpm. Can linuxcnc keep track of a low count spindle encoder at low rpm without the assistance of something like the Mesa boards? How low can the spindle encoder count be and still give adequate threading capability? Is this futile? I think the Mesa boards are a good value but the budget is pretty tight right now. Thanks for any guidance.
Below is the results of my latency test.
Last edit: 25 Sep 2015 05:33 by joe523. Reason: resize photo
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-

Less
More
- Posts: 19105
- Thank you received: 5276
25 Sep 2015 08:21 #62965
by PCW
Replied by PCW on topic Bare bones lathe conversion
Your CPU has rather poor latency specs so this will limit your maximum base thread rate to about 8 KHz
(1/ (max_latency*2) which will in turn, limit both your maximum step rate and encoder resolution in a parallel port system.
so if you have another possible PC you might try it.
Also have you made sure to disable all power saving option in the BIOS?
If this is an older PC, you might chose an older OS like the Ubuntu 10.04 linuxcnc distribution as it tends
to have better latency on older hardware
(1/ (max_latency*2) which will in turn, limit both your maximum step rate and encoder resolution in a parallel port system.
so if you have another possible PC you might try it.
Also have you made sure to disable all power saving option in the BIOS?
If this is an older PC, you might chose an older OS like the Ubuntu 10.04 linuxcnc distribution as it tends
to have better latency on older hardware
Please Log in or Create an account to join the conversation.
- andypugh
-

- Away
- Moderator
-
Less
More
- Posts: 23517
- Thank you received: 5000
25 Sep 2015 23:46 #62993
by andypugh
To convert to RPM, that means that a 200 count encoder (50 slots) should be OK to 2400 rpm, though in practice it will start to go wrong below that speed.
I have threaded with a 50 slot encoder, it works fine. I think as long as rpm and encoder count are both in the hundreds rather than thousands you should be fine.
Replied by andypugh on topic Bare bones lathe conversion
Your CPU has rather poor latency specs so this will limit your maximum base thread rate to about 8 KHz
(1/ (max_latency*2) which will in turn, limit both your maximum step rate and encoder resolution in a parallel port system.
To convert to RPM, that means that a 200 count encoder (50 slots) should be OK to 2400 rpm, though in practice it will start to go wrong below that speed.
I have threaded with a 50 slot encoder, it works fine. I think as long as rpm and encoder count are both in the hundreds rather than thousands you should be fine.
Please Log in or Create an account to join the conversation.
- joe523
- Offline
- New Member
-
Less
More
- Posts: 4
- Thank you received: 0
26 Sep 2015 04:45 #63010
by joe523
Replied by joe523 on topic Bare bones lathe conversion
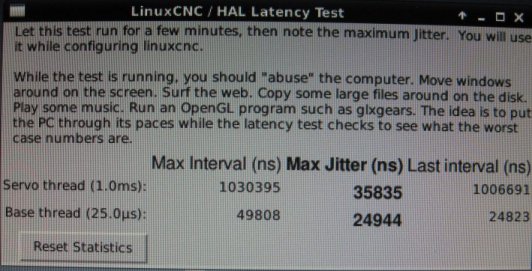
Thanks for the replies. Some real world feedback is valuable at this point. I do have a faster, dual core machine I tried last night. Latency numbers look better, I think.
I will make an encoder wheel with around 50 slots. The only thing I have to lose is time. I have excellent torque even down in the low hundreds rpm.
I plan to use hal scope to get to two slotted optoisolator close to 90° separation for quadrature output. Dumb idea? I guess you really only need one phase plus index for threading and not full quadrature output.
I will make an encoder wheel with around 50 slots. The only thing I have to lose is time. I have excellent torque even down in the low hundreds rpm.
I plan to use hal scope to get to two slotted optoisolator close to 90° separation for quadrature output. Dumb idea? I guess you really only need one phase plus index for threading and not full quadrature output.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Away
- Moderator
-
Less
More
- Posts: 23517
- Thank you received: 5000
26 Sep 2015 05:30 #63011
by andypugh
Yes, one phase plus index is fine, but you do need the index.
With a second quadrature channel you get the option of rigid tapping too.
Replied by andypugh on topic Bare bones lathe conversion
I plan to use hal scope to get to two slotted optoisolator close to 90° separation for quadrature output. Dumb idea? I guess you really only need one phase plus index for threading and not full quadrature output.
Yes, one phase plus index is fine, but you do need the index.
With a second quadrature channel you get the option of rigid tapping too.
Please Log in or Create an account to join the conversation.
Moderators: piasdom
Time to create page: 0.096 seconds