Fanuc and 5i25/7i77 couple
- ligthmare
- Offline
- New Member
-

Less
More
- Posts: 16
- Thank you received: 0
28 Jul 2017 13:07 - 28 Jul 2017 13:21 #96617
by ligthmare
Fanuc and 5i25/7i77 couple was created by ligthmare
Hi Everybody.
I have bought a plug and go kit 5i25/7i77 for piloting an old hurco cnc machine with fanuc driver.
So i'm trying to conect all the cable but i'm not sur about my choice.
If you can confirm my configuration .
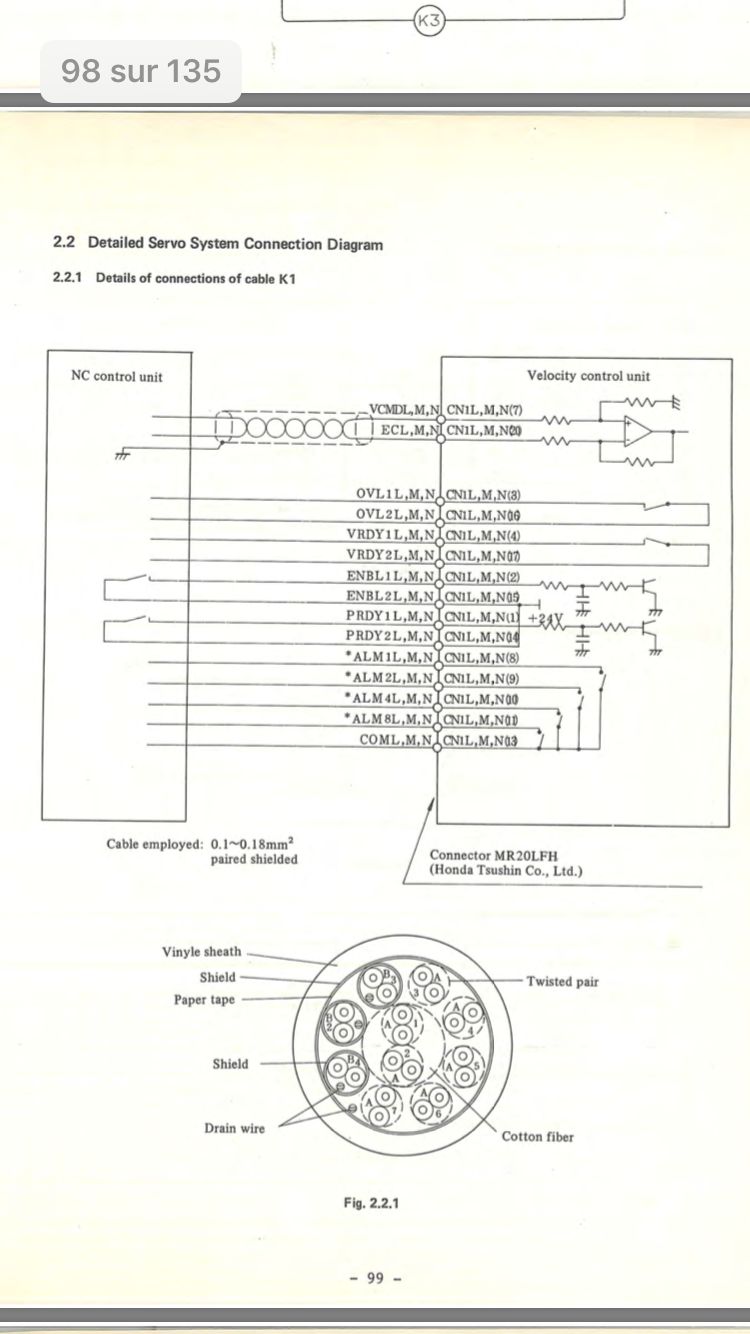
The K1 cable for the drive control
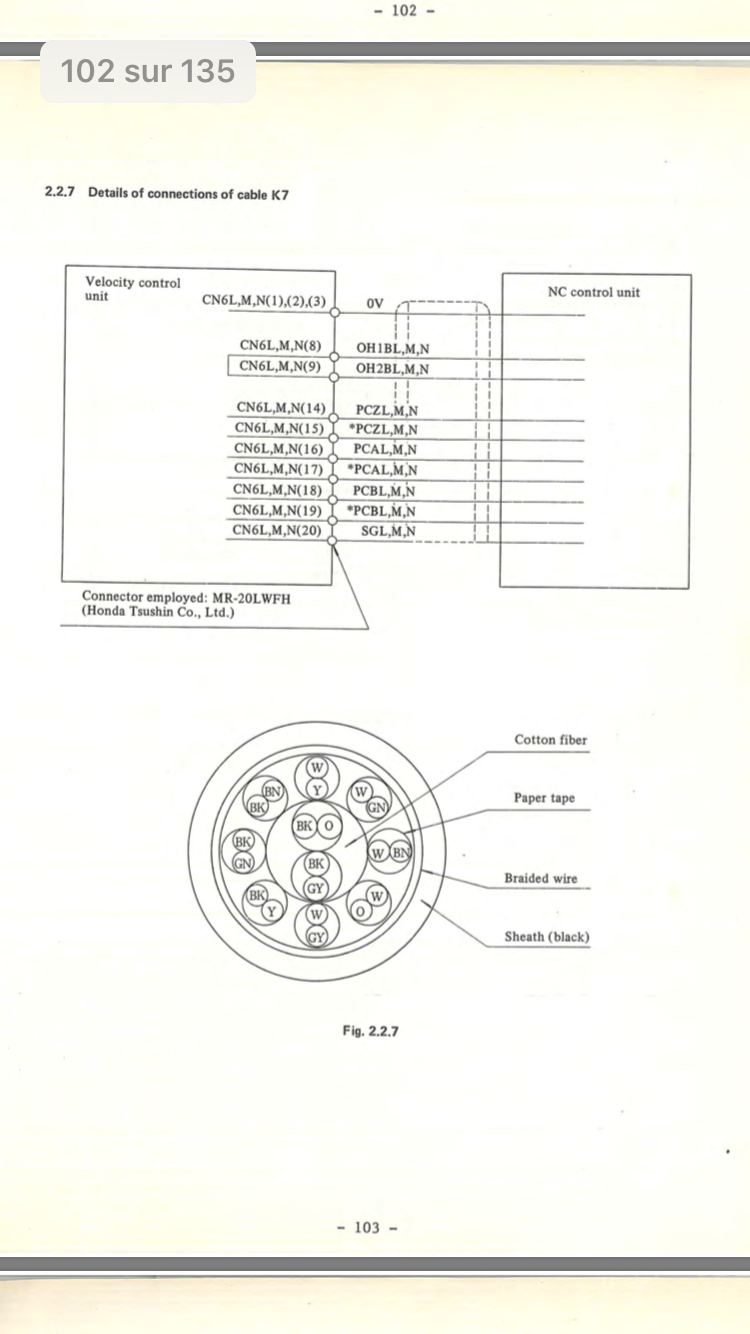
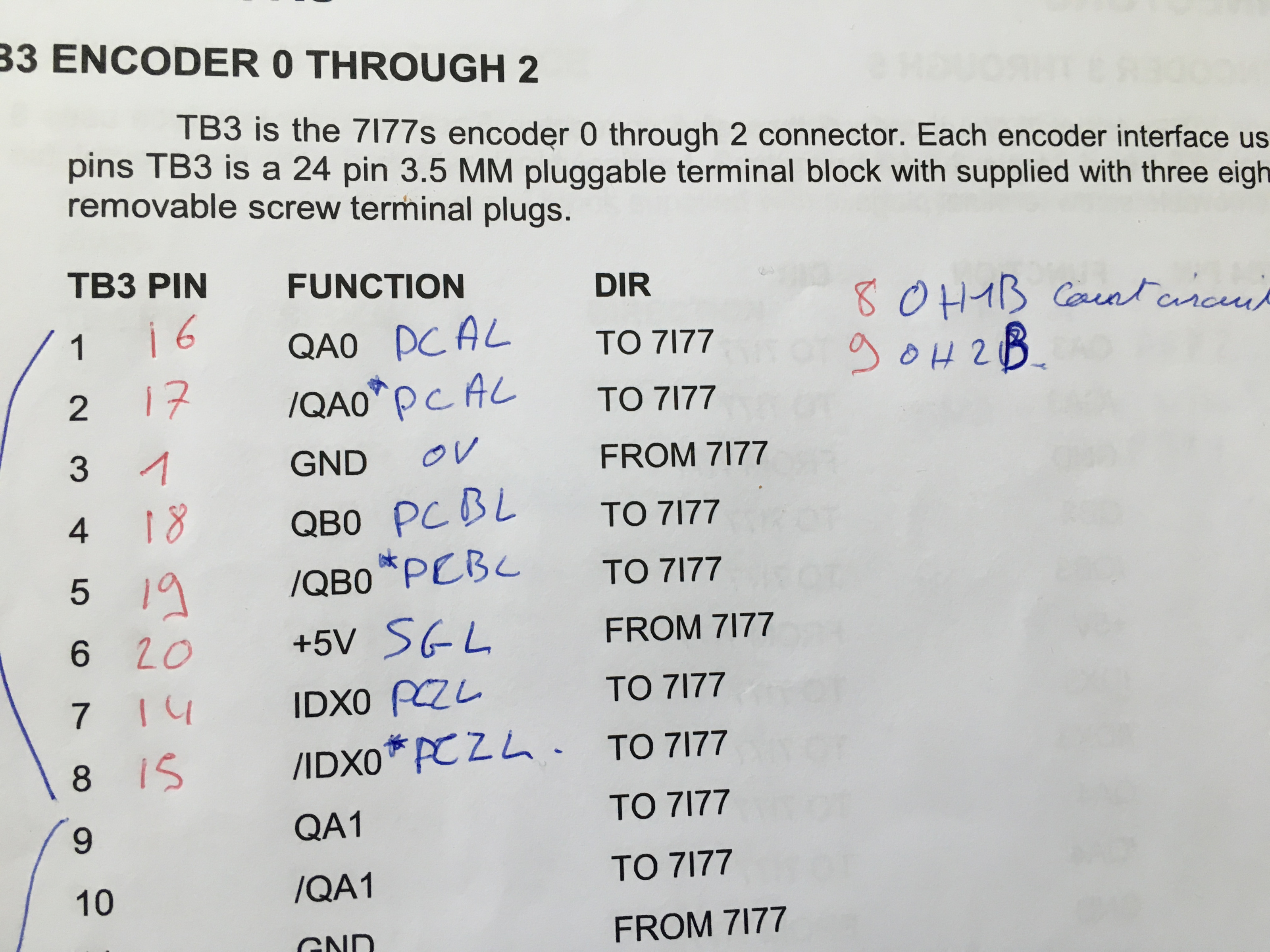
K7 cable for encoder
And the routing on the 7i77 , I have shunt oh1 and oh2 , and also prdy1 and prdy2.
I have connect en0+ to enbl2 and en0- to enbl1
Do I need to conect the End-stop?

And for the rest of the connection I do somthing like this
Thanks for all
I have bought a plug and go kit 5i25/7i77 for piloting an old hurco cnc machine with fanuc driver.
So i'm trying to conect all the cable but i'm not sur about my choice.
If you can confirm my configuration .
The K1 cable for the drive control
K7 cable for encoder
And the routing on the 7i77 , I have shunt oh1 and oh2 , and also prdy1 and prdy2.
I have connect en0+ to enbl2 and en0- to enbl1
Do I need to conect the End-stop?
And for the rest of the connection I do somthing like this
Thanks for all
Last edit: 28 Jul 2017 13:21 by ligthmare.
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19875
- Thank you received: 4641
29 Jul 2017 22:58 #96664
by andypugh
Replied by andypugh on topic Fanuc and 5i25/7i77 couple
Your guesses look the same as my guesses....
Please Log in or Create an account to join the conversation.
- ligthmare
- Offline
- New Member
-
Less
More
- Posts: 16
- Thank you received: 0
16 Aug 2017 11:39 #97564
by ligthmare
Replied by ligthmare on topic Fanuc and 5i25/7i77 couple
Thanks for your help!
So I have a problem : when I try to start my PCB (fanuc driver card ) it's turning off when I connect the CN6 cable (encoder from pcb to 7i77)
All the power supply work and the PCB is turning on when my CN6N,L,M cable are unconnected. The Prdy led is green.
Maybe i have a wrong connection.
CN5L (from encoder to PBC)
I have try to connect 1,2,3 to 0v 4,5,6 and 20 (SGL) to 5v, and also with SGL unconnected .
I don't know what is this SGL?


So I have a problem : when I try to start my PCB (fanuc driver card ) it's turning off when I connect the CN6 cable (encoder from pcb to 7i77)
All the power supply work and the PCB is turning on when my CN6N,L,M cable are unconnected. The Prdy led is green.
Maybe i have a wrong connection.
CN5L (from encoder to PBC)
I have try to connect 1,2,3 to 0v 4,5,6 and 20 (SGL) to 5v, and also with SGL unconnected .
I don't know what is this SGL?


Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19875
- Thank you received: 4641
16 Aug 2017 13:37 #97567
by andypugh
Replied by andypugh on topic Fanuc and 5i25/7i77 couple
If the PCB is already working then I would guess that you don't need to connect the 5V supply from the 7i77. Try it without that connection.
Please Log in or Create an account to join the conversation.
- ligthmare
- Offline
- New Member
-
Less
More
- Posts: 16
- Thank you received: 0
16 Aug 2017 14:48 #97576
by ligthmare
Replied by ligthmare on topic Fanuc and 5i25/7i77 couple
Thanks! I have been disconnect the 5v and the pcb let's start .
But i have an error when I try to move one axis : joint 0 following error.
My motor are : fanuc ac motor servo a06b-0513-b002 3phase 8 poles 2000rpm pulse coder
this my .ini
# Generated by PNCconf at Tue Aug 15 10:13:45 2017
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
[EMC]
MACHINE = dorado
DEBUG = 0
[DISPLAY]
DISPLAY = axis
POSITION_OFFSET = RELATIVE
POSITION_FEEDBACK = ACTUAL
MAX_FEED_OVERRIDE = 2.000000
MAX_SPINDLE_OVERRIDE = 1.000000
MIN_SPINDLE_OVERRIDE = 0.500000
INTRO_GRAPHIC = linuxcnc.gif
INTRO_TIME = 5
PROGRAM_PREFIX = /home/ligthmare/linuxcnc/nc_files
INCREMENTS = 5mm 1mm .5mm .1mm .05mm .01mm .005mm
POSITION_FEEDBACK = ACTUAL
DEFAULT_LINEAR_VELOCITY = 6.000000
MAX_LINEAR_VELOCITY = 25.000000
MIN_LINEAR_VELOCITY = 0.500000
DEFAULT_ANGULAR_VELOCITY = 12.000000
MAX_ANGULAR_VELOCITY = 180.000000
MIN_ANGULAR_VELOCITY = 1.666667
EDITOR = gedit
GEOMETRY = xyz
[FILTER]
PROGRAM_EXTENSION = .png,.gif,.jpg Greyscale Depth Image
PROGRAM_EXTENSION = .py Python Script
png = image-to-gcode
gif = image-to-gcode
jpg = image-to-gcode
py = python
[TASK]
TASK = milltask
CYCLE_TIME = 0.010
[RS274NGC]
PARAMETER_FILE = linuxcnc.var
[EMCMOT]
EMCMOT = motmod
COMM_TIMEOUT = 1.0
COMM_WAIT = 0.010
SERVO_PERIOD = 1000000
[HOSTMOT2]
# **** This is for info only ****
# DRIVER0=hm2_pci
# BOARD0=5i25
[HAL]
HALUI = halui
HALFILE = dorado.hal
HALFILE = custom.hal
POSTGUI_HALFILE = postgui_call_list.hal
SHUTDOWN = shutdown.hal
[HALUI]
[TRAJ]
AXES = 3
COORDINATES = X Y Z
LINEAR_UNITS = mm
ANGULAR_UNITS = degree
CYCLE_TIME = 0.010
DEFAULT_VELOCITY = 2.50
MAX_LINEAR_VELOCITY = 25.00
NO_FORCE_HOMING = 1
[EMCIO]
EMCIO = io
CYCLE_TIME = 0.100
TOOL_TABLE = tool.tbl
#********************
# Axis X
#********************
[AXIS_0]
TYPE = LINEAR
HOME = 0.0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 25.0
MAX_ACCELERATION = 750.0
P = 50.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
ENCODER_SCALE = 1.0
OUTPUT_SCALE = 10.0
OUTPUT_MIN_LIMIT = -10.0
OUTPUT_MAX_LIMIT = 10.0
MIN_LIMIT = -0.01
MAX_LIMIT = 200.0
HOME_OFFSET = 0.0
#********************
# Axis Y
#********************
[AXIS_1]
TYPE = LINEAR
HOME = 0.0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 25.0
MAX_ACCELERATION = 750.0
P = 50.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
ENCODER_SCALE = 1.0
OUTPUT_SCALE = 10.0
OUTPUT_MIN_LIMIT = -10.0
OUTPUT_MAX_LIMIT = 10.0
MIN_LIMIT = -0.01
MAX_LIMIT = 200.0
HOME_OFFSET = 0.0
#********************
# Axis Z
#********************
[AXIS_2]
TYPE = LINEAR
HOME = 0.0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 25.0
MAX_ACCELERATION = 750.0
P = 50.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
ENCODER_SCALE = 1.0
OUTPUT_SCALE = 10.0
OUTPUT_MIN_LIMIT = -10.0
OUTPUT_MAX_LIMIT = 10.0
MIN_LIMIT = -100.0
MAX_LIMIT = 0.01
HOME_OFFSET = 0.0
#********************
# Spindle
#********************
[SPINDLE_9]
P = 0
I = 0
D = 0
FF0 = 1
FF1 = 0
FF2 = 0
BIAS = 0
DEADBAND = 0
MAX_OUTPUT = 2000
But i have an error when I try to move one axis : joint 0 following error.
My motor are : fanuc ac motor servo a06b-0513-b002 3phase 8 poles 2000rpm pulse coder
this my .ini
# Generated by PNCconf at Tue Aug 15 10:13:45 2017
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
[EMC]
MACHINE = dorado
DEBUG = 0
[DISPLAY]
DISPLAY = axis
POSITION_OFFSET = RELATIVE
POSITION_FEEDBACK = ACTUAL
MAX_FEED_OVERRIDE = 2.000000
MAX_SPINDLE_OVERRIDE = 1.000000
MIN_SPINDLE_OVERRIDE = 0.500000
INTRO_GRAPHIC = linuxcnc.gif
INTRO_TIME = 5
PROGRAM_PREFIX = /home/ligthmare/linuxcnc/nc_files
INCREMENTS = 5mm 1mm .5mm .1mm .05mm .01mm .005mm
POSITION_FEEDBACK = ACTUAL
DEFAULT_LINEAR_VELOCITY = 6.000000
MAX_LINEAR_VELOCITY = 25.000000
MIN_LINEAR_VELOCITY = 0.500000
DEFAULT_ANGULAR_VELOCITY = 12.000000
MAX_ANGULAR_VELOCITY = 180.000000
MIN_ANGULAR_VELOCITY = 1.666667
EDITOR = gedit
GEOMETRY = xyz
[FILTER]
PROGRAM_EXTENSION = .png,.gif,.jpg Greyscale Depth Image
PROGRAM_EXTENSION = .py Python Script
png = image-to-gcode
gif = image-to-gcode
jpg = image-to-gcode
py = python
[TASK]
TASK = milltask
CYCLE_TIME = 0.010
[RS274NGC]
PARAMETER_FILE = linuxcnc.var
[EMCMOT]
EMCMOT = motmod
COMM_TIMEOUT = 1.0
COMM_WAIT = 0.010
SERVO_PERIOD = 1000000
[HOSTMOT2]
# **** This is for info only ****
# DRIVER0=hm2_pci
# BOARD0=5i25
[HAL]
HALUI = halui
HALFILE = dorado.hal
HALFILE = custom.hal
POSTGUI_HALFILE = postgui_call_list.hal
SHUTDOWN = shutdown.hal
[HALUI]
[TRAJ]
AXES = 3
COORDINATES = X Y Z
LINEAR_UNITS = mm
ANGULAR_UNITS = degree
CYCLE_TIME = 0.010
DEFAULT_VELOCITY = 2.50
MAX_LINEAR_VELOCITY = 25.00
NO_FORCE_HOMING = 1
[EMCIO]
EMCIO = io
CYCLE_TIME = 0.100
TOOL_TABLE = tool.tbl
#********************
# Axis X
#********************
[AXIS_0]
TYPE = LINEAR
HOME = 0.0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 25.0
MAX_ACCELERATION = 750.0
P = 50.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
ENCODER_SCALE = 1.0
OUTPUT_SCALE = 10.0
OUTPUT_MIN_LIMIT = -10.0
OUTPUT_MAX_LIMIT = 10.0
MIN_LIMIT = -0.01
MAX_LIMIT = 200.0
HOME_OFFSET = 0.0
#********************
# Axis Y
#********************
[AXIS_1]
TYPE = LINEAR
HOME = 0.0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 25.0
MAX_ACCELERATION = 750.0
P = 50.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
ENCODER_SCALE = 1.0
OUTPUT_SCALE = 10.0
OUTPUT_MIN_LIMIT = -10.0
OUTPUT_MAX_LIMIT = 10.0
MIN_LIMIT = -0.01
MAX_LIMIT = 200.0
HOME_OFFSET = 0.0
#********************
# Axis Z
#********************
[AXIS_2]
TYPE = LINEAR
HOME = 0.0
FERROR = 10.0
MIN_FERROR = 1.0
MAX_VELOCITY = 25.0
MAX_ACCELERATION = 750.0
P = 50.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
ENCODER_SCALE = 1.0
OUTPUT_SCALE = 10.0
OUTPUT_MIN_LIMIT = -10.0
OUTPUT_MAX_LIMIT = 10.0
MIN_LIMIT = -100.0
MAX_LIMIT = 0.01
HOME_OFFSET = 0.0
#********************
# Spindle
#********************
[SPINDLE_9]
P = 0
I = 0
D = 0
FF0 = 1
FF1 = 0
FF2 = 0
BIAS = 0
DEADBAND = 0
MAX_OUTPUT = 2000
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19875
- Thank you received: 4641
16 Aug 2017 15:06 #97580
by andypugh
Replied by andypugh on topic Fanuc and 5i25/7i77 couple
Does a positive output from the 7i77 make the corresponding encoder count up?
The encoder scale and output scale have to agree on which direction is axis-positive.
You may need to make either the encoder scale or the output scale negative.
Also, an encoder scale of 1 seems _very_ unlikely. 1 count per inch? 1 count per mm? Both are impossible.
The encoder scale and output scale have to agree on which direction is axis-positive.
You may need to make either the encoder scale or the output scale negative.
Also, an encoder scale of 1 seems _very_ unlikely. 1 count per inch? 1 count per mm? Both are impossible.
Please Log in or Create an account to join the conversation.
- ligthmare
- Offline
- New Member
-
Less
More
- Posts: 16
- Thank you received: 0
16 Aug 2017 16:01 #97583
by ligthmare
On the datasheet motor I have find this . But I dont know if the 5v needed provide from the pcb or the 7i77.
My encoder is the ai1600 serie , so I have 16,000,000/rev . I need to put 16000000 in the encoder scale in the ini?
Replied by ligthmare on topic Fanuc and 5i25/7i77 couple
Does a positive output from the 7i77 make the corresponding encoder count ?
On the datasheet motor I have find this . But I dont know if the 5v needed provide from the pcb or the 7i77.
My encoder is the ai1600 serie , so I have 16,000,000/rev . I need to put 16000000 in the encoder scale in the ini?
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19875
- Thank you received: 4641
16 Aug 2017 17:42 #97588
by andypugh
It should be the number of counts per unit distance. So for a 5mm leadscrew the scale would be 16,000,000 / 5
SCALE=3200177.8
Replied by andypugh on topic Fanuc and 5i25/7i77 couple
My encoder is the ai1600 serie , so I have 16,000,000/rev . I need to put 16000000 in the encoder scale in the ini?
It should be the number of counts per unit distance. So for a 5mm leadscrew the scale would be 16,000,000 / 5
SCALE=3200177.8
Please Log in or Create an account to join the conversation.
- ligthmare
- Offline
- New Member
-
Less
More
- Posts: 16
- Thank you received: 0
17 Aug 2017 13:15 #97621
by ligthmare
Replied by ligthmare on topic Fanuc and 5i25/7i77 couple
I have been enter the new configuration , but I have a problem with the Enable.
i have been check the good clamp of enable on the 7i77 and I have shunt the prdy1 and prdy2 cable to simulate the relay.
But I don't have 24v on my Prdy1. and I cannot find the 24v pin chek on the PCB. i have control the 185v, 100v and 18v power supply , also the fuse on the PCB . all it's ok
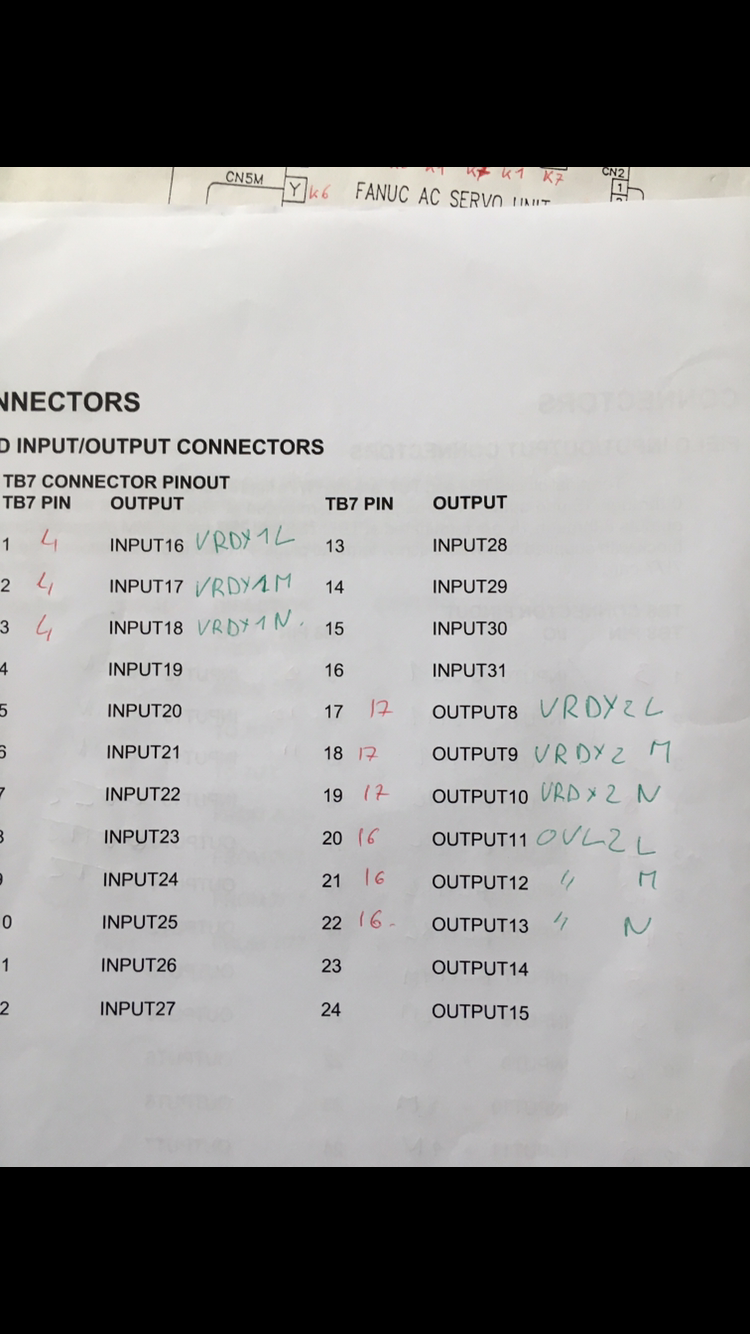
Also I 'don't understand the Vrdy use.
i have been check the good clamp of enable on the 7i77 and I have shunt the prdy1 and prdy2 cable to simulate the relay.
But I don't have 24v on my Prdy1. and I cannot find the 24v pin chek on the PCB. i have control the 185v, 100v and 18v power supply , also the fuse on the PCB . all it's ok
Also I 'don't understand the Vrdy use.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19875
- Thank you received: 4641
17 Aug 2017 15:01 #97637
by andypugh
Replied by andypugh on topic Fanuc and 5i25/7i77 couple
VRdy might be the drive enable, indicating that the HV bus is up and ready. But that is a pure guess.
Please Log in or Create an account to join the conversation.
Moderators: PCW, jmelson
Time to create page: 1.866 seconds