Request 7i92 custom firmware to drive xy2-100 galvo
- HotCat
- Offline
- New Member
-

- Posts: 5
- Thank you received: 0
Just heard that 7i96 can drive digital galvo using custom firmware. I would love
to try. But I only got 7i92 + 7i76, could you please compile 7i92 custom firmware
for me, so that I could use halstreamer to stream the Openlase output to xy2mod. Thanks
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

- Posts: 17961
- Thank you received: 5265
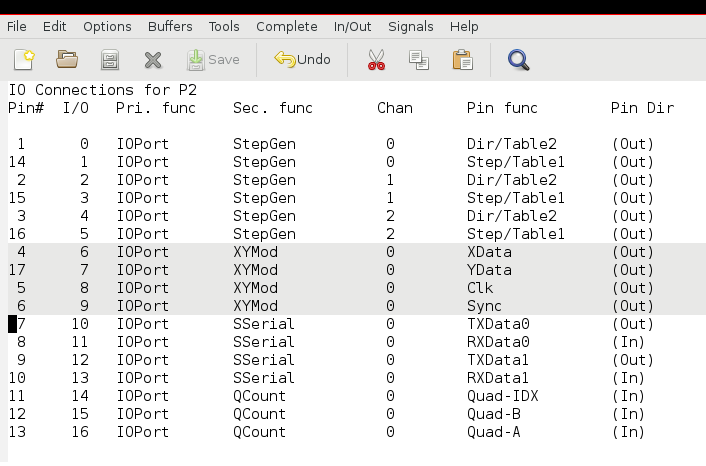
This puts the XY2-100 interface on the 7I76 stepgen 3,4 pins:
Configuration pin-out:
IO Connections for P2
Pin# I/O Pri. func Sec. func Chan Pin func Pin Dir
TB2-4,5 0 IOPort StepGen 0 Dir/Table2 (Out)
TB2-2,3 1 IOPort StepGen 0 Step/Table1 (Out)
TB2-10,11 2 IOPort StepGen 1 Dir/Table2 (Out)
TB2-8,9 3 IOPort StepGen 1 Step/Table1 (Out)
TB2-16,17 4 IOPort StepGen 2 Dir/Table2 (Out)
TB2-14,15 5 IOPort StepGen 2 Step/Table1 (Out)
TB2-22,23 6 IOPort XYMod 0 XData (Out)
TB2-20,21 7 IOPort XYMod 0 YData (Out)
TB3-4,5 8 IOPort XYMod 0 Clk (Out)
TB3-2,3 9 IOPort XYMod 0 Sync (Out)
Internal-Field-IO 10 IOPort SSerial 0 TXData0 (Out)
Internal-Field-IO 11 IOPort SSerial 0 RXData0 (In)
TB3-18,19 12 IOPort SSerial 0 TXData1 (Out)
TB3-16,17 13 IOPort SSerial 0 RXData1 (In)
TB3-13,14 14 IOPort QCount 0 Quad-IDX (In)
TB3-10,11 15 IOPort QCount 0 Quad-B (In)
TB3-7,8 16 IOPort QCount 0 Quad-A (In)
Attachments:
Please Log in or Create an account to join the conversation.
- HotCat
- Offline
- New Member
-
- Posts: 5
- Thank you received: 0

Attachments:
Please Log in or Create an account to join the conversation.
- HotCat
- Offline
- New Member
-
- Posts: 5
- Thank you received: 0
The 7i92's INT light asserts and linuxcnc shows packages error limits exceedlinuxcnc
LINUXCNC - 2.9.0~pre0
Machine configuration directory is '/home/test/linuxcnc/configs/7i96_xy'
Machine configuration file is '7i96masterpexy100.ini'
Starting LinuxCNC...
emc/iotask/ioControl.cc 769: can't load tool table.
Found file(REL): ./hm2-pidstepper-master-pexy100.hal
Note: Using POSIX realtime
hm2: loading Mesa HostMot2 driver version 0.15
hm2_eth: loading Mesa AnyIO HostMot2 ethernet driver version 0.2
hm2_eth: 192.168.1.121: INFO: Hardware address (MAC): 00:60:1b:13:04:c6
hm2_eth: discovered 7I92
hm2/hm2_7i92.0: Low Level init 0.15
hm2/hm2_7i92.0: Smart Serial Firmware Version 43
Board hm2_7i92.0.7i76.0.0 Hardware Mode 0 = standard
Board hm2_7i92.0.7i76.0.0 Software Mode 0 = io_spin
Board hm2_7i92.0.7i76.0.0 Software Mode 1 = io_ana_spin
Board hm2_7i92.0.7i76.0.0 Software Mode 2 = io_enc_ana_spin_fv
hm2/hm2_7i92.0: 34 I/O Pins used:
hm2/hm2_7i92.0: IO Pin 000 (P2-01): StepGen #0, pin Direction (Output)
hm2/hm2_7i92.0: IO Pin 001 (P2-14): StepGen #0, pin Step (Output)
hm2/hm2_7i92.0: IO Pin 002 (P2-02): StepGen #1, pin Direction (Output)
hm2/hm2_7i92.0: IO Pin 003 (P2-15): StepGen #1, pin Step (Output)
hm2/hm2_7i92.0: IO Pin 004 (P2-03): StepGen #2, pin Direction (Output)
hm2/hm2_7i92.0: IO Pin 005 (P2-16): StepGen #2, pin Step (Output)
hm2/hm2_7i92.0: IO Pin 006 (P2-04): xy2mod Galvo interface #0, pin datax (Output)
hm2/hm2_7i92.0: IO Pin 007 (P2-17): xy2mod Galvo interface #0, pin datay (Output)
hm2/hm2_7i92.0: IO Pin 008 (P2-05): xy2mod Galvo interface #0, pin clk (Output)
hm2/hm2_7i92.0: IO Pin 009 (P2-06): xy2mod Galvo interface #0, pin sync (Output)
hm2/hm2_7i92.0: IO Pin 010 (P2-07): Smart Serial Interface #0, pin tx0 (Output)
hm2/hm2_7i92.0: IO Pin 011 (P2-08): Smart Serial Interface #0, pin rx0 (Input)
hm2/hm2_7i92.0: IO Pin 012 (P2-09): IOPort
hm2/hm2_7i92.0: IO Pin 013 (P2-10): IOPort
hm2/hm2_7i92.0: IO Pin 014 (P2-11): Encoder #0, pin Index (Input)
hm2/hm2_7i92.0: IO Pin 015 (P2-12): Encoder #0, pin B (Input)
hm2/hm2_7i92.0: IO Pin 016 (P2-13): Encoder #0, pin A (Input)
hm2/hm2_7i92.0: IO Pin 017 (P1-01): IOPort
hm2/hm2_7i92.0: IO Pin 018 (P1-14): IOPort
hm2/hm2_7i92.0: IO Pin 019 (P1-02): IOPort
hm2/hm2_7i92.0: IO Pin 020 (P1-15): IOPort
hm2/hm2_7i92.0: IO Pin 021 (P1-03): IOPort
hm2/hm2_7i92.0: IO Pin 022 (P1-16): IOPort
hm2/hm2_7i92.0: IO Pin 023 (P1-04): IOPort
hm2/hm2_7i92.0: IO Pin 024 (P1-17): IOPort
hm2/hm2_7i92.0: IO Pin 025 (P1-05): IOPort
hm2/hm2_7i92.0: IO Pin 026 (P1-06): IOPort
hm2/hm2_7i92.0: IO Pin 027 (P1-07): IOPort
hm2/hm2_7i92.0: IO Pin 028 (P1-08): IOPort
hm2/hm2_7i92.0: IO Pin 029 (P1-09): IOPort
hm2/hm2_7i92.0: IO Pin 030 (P1-10): IOPort
hm2/hm2_7i92.0: IO Pin 031 (P1-11): IOPort
hm2/hm2_7i92.0: IO Pin 032 (P1-12): IOPort
hm2/hm2_7i92.0: IO Pin 033 (P1-13): IOPort
hm2/hm2_7i92.0: registered
hm2/hm2_7i92.0: error finishing read! iter=26
hm2/hm2_7i92.0: error finishing read! iter=26
note: MAXV max: 350.000 units/sec 21000.000 units/min
note: LJOG max: 350.000 units/sec 21000.000 units/min
note: LJOG default: 350.000 units/sec 21000.000 units/min
note: jog_order='XYZ'
note: jog_invert=set([])
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
- Posts: 17961
- Thank you received: 5265
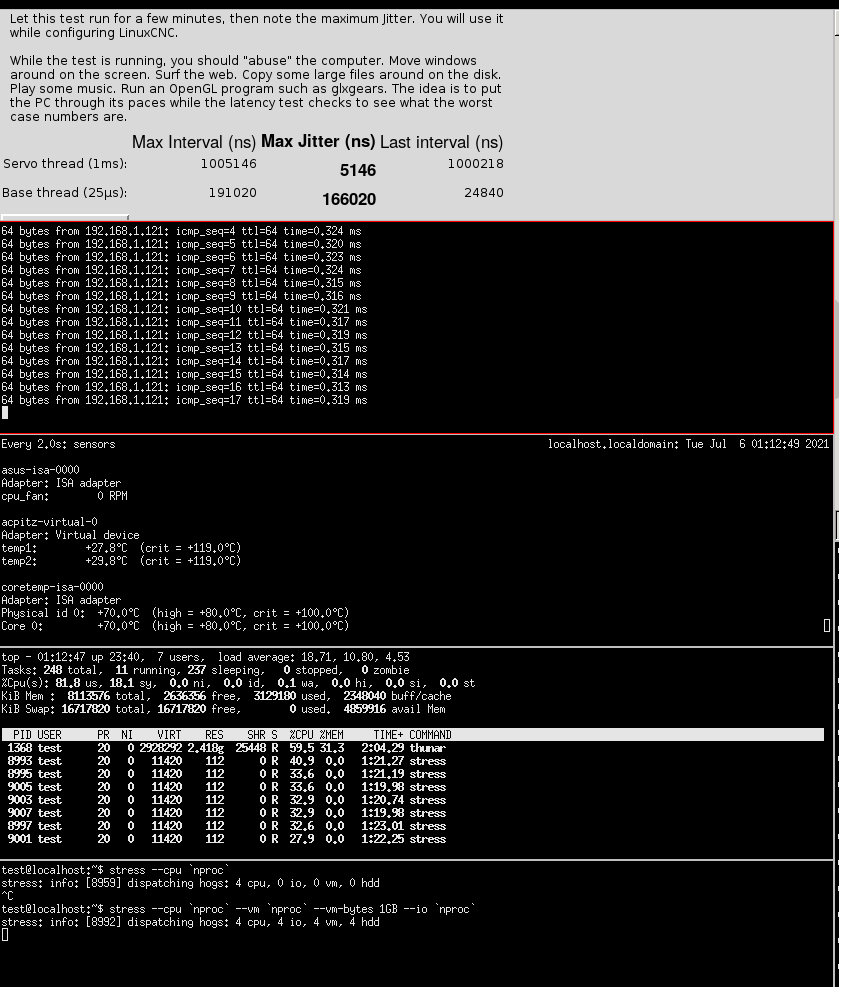
Have you run a latency test?
Also what are the ping times? (pinging the 7I92)
Please Log in or Create an account to join the conversation.
- HotCat
- Offline
- New Member
-
- Posts: 5
- Thank you received: 0
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
- Posts: 17961
- Thank you received: 5265
That will be a problem with a 1 KHz servo thread
Is there any power management on the Ethernet?
Is any Intel Ethernet snooping enabled like AMT mode?
Please Log in or Create an account to join the conversation.
- HotCat
- Offline
- New Member
-
- Posts: 5
- Thank you received: 0
So I migrant to another old PC(Dell OPTIPLEX 3020) with Intel i3-4150 and RTL 8168 Gigabit Ethernet Controller. Got ping time 0.125ms, run linuxCNC and read error went away. Now I can jog the two galvo mirror respectively.
I still strive to figure out how to setup scale, determine the x, y rotation limits and tune the PID. According to the vendors spec, the mirror flaps +-20 deg and the small signal step response is 0.2ms. I am learning a lot from this thread, RPi4 & 7i96 XY2-100 Following Error at High Velocities , hope I can all score out
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-
- Posts: 19875
- Thank you received: 4642
Please Log in or Create an account to join the conversation.