Ethercat retrofit
- fsabbatini
- Offline
- Senior Member
-

Less
More
- Posts: 43
- Thank you received: 70
10 Oct 2020 01:07 #185525
by fsabbatini
Ethercat retrofit was created by fsabbatini
Hi everyone!
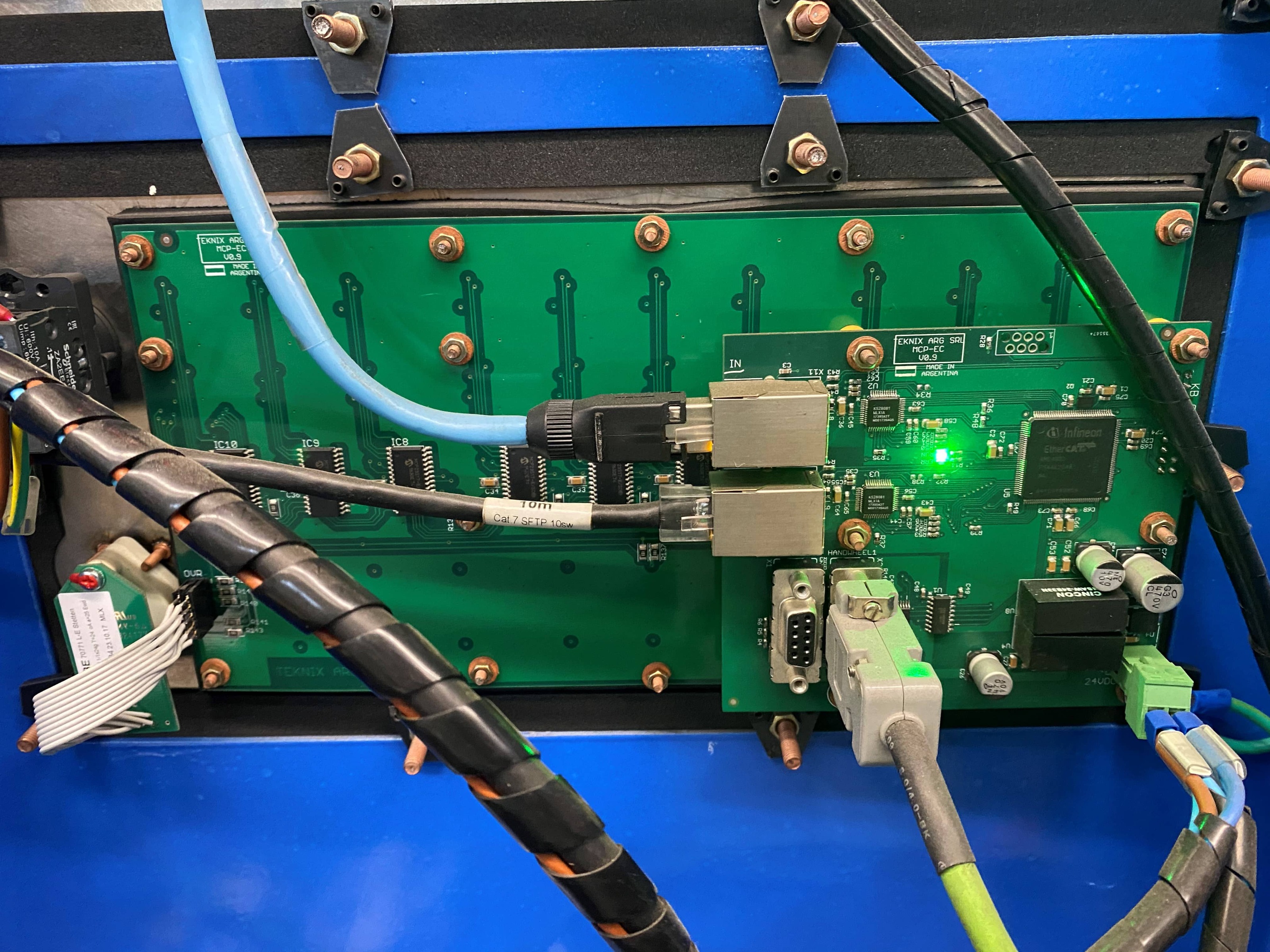
So I just wanted to show you the last retrofit I did: It consist of servomotor of 16Nm with 15kw spindle. Coe Ethercat drivers + Ethercat IO + Siemens-like Machine control panel (MCP) running also in ethercat. The handwheel is connected to the MCP.
It has an advantech industrial SBC PC.
Any question, more than welcome
Regards
Franco





So I just wanted to show you the last retrofit I did: It consist of servomotor of 16Nm with 15kw spindle. Coe Ethercat drivers + Ethercat IO + Siemens-like Machine control panel (MCP) running also in ethercat. The handwheel is connected to the MCP.
It has an advantech industrial SBC PC.
Any question, more than welcome
Regards
Franco
The following user(s) said Thank You: sivaraj, tommylight, besriworld
Please Log in or Create an account to join the conversation.
- pinder
-

- Offline
- Elite Member
-

Less
More
- Posts: 196
- Thank you received: 128
10 Oct 2020 05:35 #185556
by pinder
Replied by pinder on topic Ethercat retrofit
That looks amazing. Thankyou for sharing nice photos here.
Can you shed some light on ethercat setup.
You modified something in control panel, or you retrofit only with software?
Can you shed some light on ethercat setup.
You modified something in control panel, or you retrofit only with software?
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21692
- Thank you received: 7414
10 Oct 2020 06:35 #185558
by tommylight
Replied by tommylight on topic Ethercat retrofit
Very nice, thank you.
Please Log in or Create an account to join the conversation.
- fsabbatini
- Offline
- Senior Member
-
Less
More
- Posts: 43
- Thank you received: 70
11 Oct 2020 22:30 #185771
by fsabbatini
Replied by fsabbatini on topic Ethercat retrofit
So I made the electronics, (mcp, keyboard, inboard and computer case). That was a prototype, I can upload some pictures of the final thing.
In software it works with the with lcec, ethercat master, and a custom ds402 profile.
I modified the linuxcnc control so you can switch between motor encoder or optical scale (read by the drives). I made a Hal component to handle encoder overflow. Also homing.c was modified to handle ds402 drive homing (several modes)
Regarding HMI this is a prototype using gmocappy lcd7 modified to work with current lcnc version but I am working on a more industry-like , no mouse HMi.
Best regards
Franco
In software it works with the with lcec, ethercat master, and a custom ds402 profile.
I modified the linuxcnc control so you can switch between motor encoder or optical scale (read by the drives). I made a Hal component to handle encoder overflow. Also homing.c was modified to handle ds402 drive homing (several modes)
Regarding HMI this is a prototype using gmocappy lcd7 modified to work with current lcnc version but I am working on a more industry-like , no mouse HMi.
Best regards
Franco
The following user(s) said Thank You: pinder
Please Log in or Create an account to join the conversation.
- pinder
-
- Offline
- Elite Member
-
Less
More
- Posts: 196
- Thank you received: 128
12 Oct 2020 03:13 #185783
by pinder
Probe basic is Fantastic for HMI
kcjengr.github.io/probe_basic/quick_start.html
I should also introduce new VCP
www.forum.linuxcnc.org/qtpyvcp/40082-mon...for-plasmac-and-mill
Cheers
Pinder
Replied by pinder on topic Ethercat retrofit
So I made the electronics, (mcp, keyboard, inboard and computer case). That was a prototype, I can upload some pictures of the final thing.
In software it works with the with lcec, ethercat master, and a custom ds402 profile.
I modified the linuxcnc control so you can switch between motor encoder or optical scale (read by the drives). I made a Hal component to handle encoder overflow. Also homing.c was modified to handle ds402 drive homing (several modes)
Regarding HMI this is a prototype using gmocappy lcd7 modified to work with current lcnc version but I am working on a more industry-like , no mouse HMi.
Best regards
Franco
Probe basic is Fantastic for HMI
kcjengr.github.io/probe_basic/quick_start.html
I should also introduce new VCP
www.forum.linuxcnc.org/qtpyvcp/40082-mon...for-plasmac-and-mill
Cheers
Pinder
Please Log in or Create an account to join the conversation.
- pyzworld
- Offline
- New Member
-

Less
More
- Posts: 3
- Thank you received: 0
04 Dec 2020 14:21 #191029
by pyzworld
Replied by pyzworld on topic Ethercat retrofit
How do you drive and control BK SERVO GS DRIVER.
Can I take a look at your configuration file? Thanks~
Can I take a look at your configuration file? Thanks~
Please Log in or Create an account to join the conversation.
Time to create page: 0.249 seconds