Teco FM50 and Mesa 7i77
- Catch22
-
 Topic Author
Topic Author
- Offline
- Elite Member
-

Less
More
- Posts: 222
- Thank you received: 17
18 Apr 2020 01:13 #164377
by Catch22
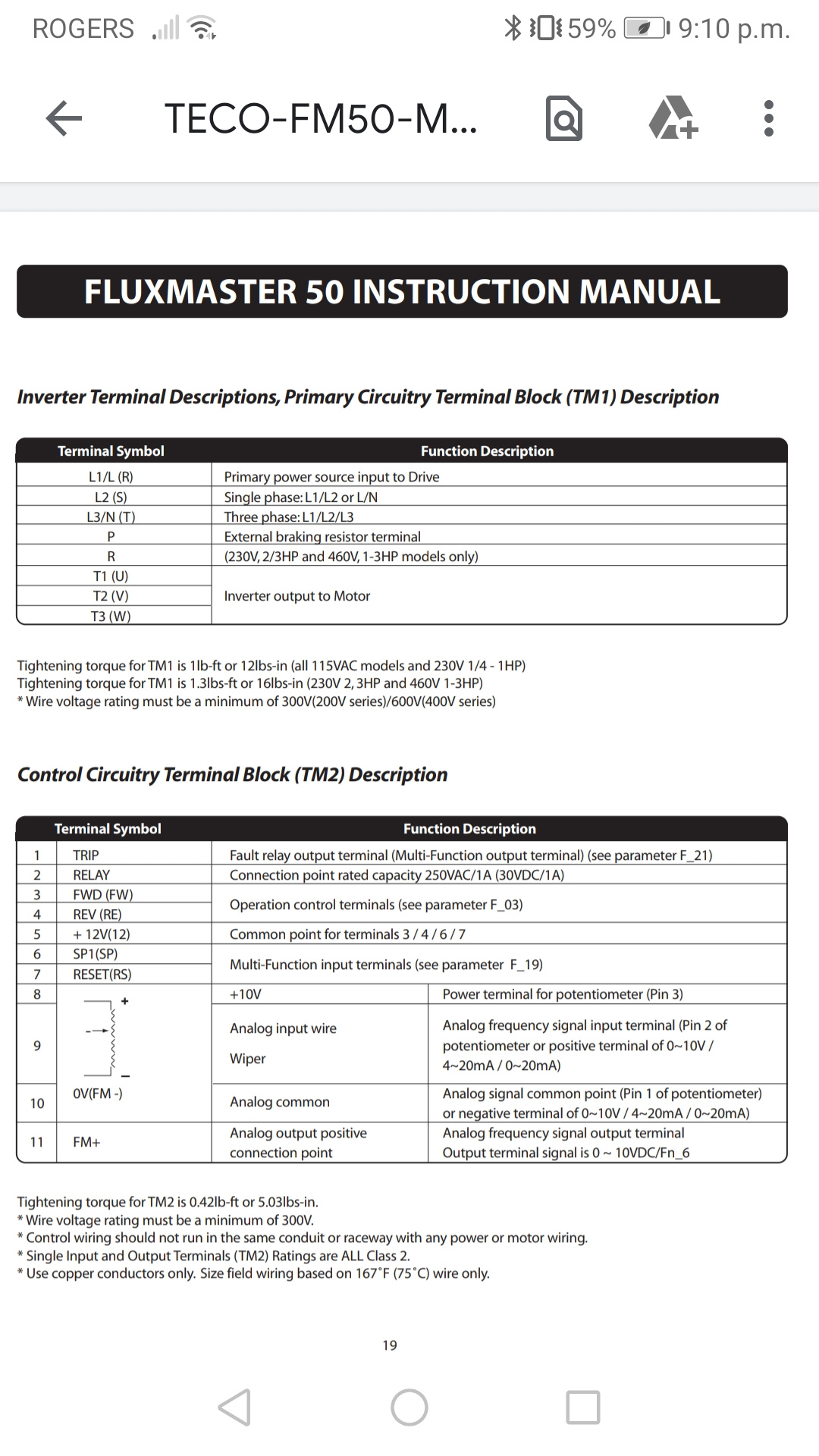
Yes it looks like it's 0-10v so do I select a positive spindle speed in the Pncconfig?
Replied by Catch22 on topic Teco FM50 and Mesa 7i77
Notice that you are commanding a negative spindle speed?
This will likely not work with the TECO as it probably expects 0 to 10V
_not_ -10 to +10
So to test further, select a positive spindle speed
If the TECO VFD is 0 to 10V you will need to connect the spindle
to the absolute RPM pin in hal rather than the signed RPM pin
Yes it looks like it's 0-10v so do I select a positive spindle speed in the Pncconfig?
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17977
- Thank you received: 5275
18 Apr 2020 01:23 #164378
by PCW
Replied by PCW on topic Teco FM50 and Mesa 7i77
For testing just select a clockwise spindle direction:
m3 s1000
in pncconf, uncheck the "Use +- voltage for direction" check box
_BUT_ you may want to make the changes in the hal file so you dont lose any tuning values you have adjusted
m3 s1000
in pncconf, uncheck the "Use +- voltage for direction" check box
_BUT_ you may want to make the changes in the hal file so you dont lose any tuning values you have adjusted
The following user(s) said Thank You: Catch22
Please Log in or Create an account to join the conversation.
- Catch22
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 222
- Thank you received: 17
18 Apr 2020 18:46 #164483
by Catch22
I tried to add to the HAL file as I found something that it said to do but now i just get an error.
addf scale.0 servo-thread
setp scale.0.gain 0.0027
net spindle-speed-scale motion.spindle-speed-out => scale.0.in
net spindle-speed-DAC scale.0.out => <your DAC pin name>
# Generated by PNCconf at Sat Apr 18 14:20:32 2020
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
loadrt trivkins
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[TRAJ]AXES
loadrt hostmot2
loadrt hm2_pci config=" num_encoders=6 num_pwmgens=0 num_stepgens=0 sserial_port_0=000xxx"
setp hm2_5i25.0.watchdog.timeout_ns 5000000
loadrt pid names=pid.x,pid.y,pid.z,pid.s
addf hm2_5i25.0.read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf pid.x.do-pid-calcs servo-thread
addf pid.y.do-pid-calcs servo-thread
addf pid.z.do-pid-calcs servo-thread
addf pid.s.do-pid-calcs servo-thread
addf hm2_5i25.0.write servo-thread
# external output signals
# external input signals
# --- ESTOP-EXT ---
net estop-ext <= hm2_5i25.0.7i77.0.0.input-00
# --- BOTH-HOME-X ---
net both-home-x <= hm2_5i25.0.7i77.0.0.input-11-not
# --- BOTH-HOME-Y ---
net both-home-y <= hm2_5i25.0.7i77.0.0.input-12-not
# --- BOTH-HOME-Z ---
net both-home-z <= hm2_5i25.0.7i77.0.0.input-13-not
# --- BOTH-HOME-A ---
net both-home-a <= hm2_5i25.0.7i77.0.0.input-14-not
#*******************
# AXIS X
#*******************
setp pid.x.Pgain [AXIS_0]P
setp pid.x.Igain [AXIS_0]I
setp pid.x.Dgain [AXIS_0]D
setp pid.x.bias [AXIS_0]BIAS
setp pid.x.FF0 [AXIS_0]FF0
setp pid.x.FF1 [AXIS_0]FF1
setp pid.x.FF2 [AXIS_0]FF2
setp pid.x.deadband [AXIS_0]DEADBAND
setp pid.x.maxoutput [AXIS_0]MAX_OUTPUT
setp pid.x.error-previous-target true
net x-index-enable <=> pid.x.index-enable
net x-enable => pid.x.enable
net x-pos-cmd => pid.x.command
net x-vel-cmd => pid.x.command-deriv
net x-pos-fb => pid.x.feedback
net x-output => pid.x.output
# ---PWM Generator signals/setup---
setp hm2_5i25.0.7i77.0.1.analogout0-scalemax [AXIS_0]OUTPUT_SCALE
setp hm2_5i25.0.7i77.0.1.analogout0-minlim [AXIS_0]OUTPUT_MIN_LIMIT
setp hm2_5i25.0.7i77.0.1.analogout0-maxlim [AXIS_0]OUTPUT_MAX_LIMIT
net x-output => hm2_5i25.0.7i77.0.1.analogout0
net x-pos-cmd axis.0.motor-pos-cmd
net x-enable axis.0.amp-enable-out
# enable _all_ sserial pwmgens
net x-enable hm2_5i25.0.7i77.0.1.analogena
# ---Encoder feedback signals/setup---
setp hm2_5i25.0.encoder.00.counter-mode 0
setp hm2_5i25.0.encoder.00.filter 1
setp hm2_5i25.0.encoder.00.index-invert 0
setp hm2_5i25.0.encoder.00.index-mask 0
setp hm2_5i25.0.encoder.00.index-mask-invert 0
setp hm2_5i25.0.encoder.00.scale [AXIS_0]ENCODER_SCALE
net x-pos-fb <= hm2_5i25.0.encoder.00.position
net x-vel-fb <= hm2_5i25.0.encoder.00.velocity
net x-pos-fb => axis.0.motor-pos-fb
net x-index-enable axis.0.index-enable <=> hm2_5i25.0.encoder.00.index-enable
net x-pos-rawcounts <= hm2_5i25.0.encoder.00.rawcounts
# ---setup home / limit switch signals---
net both-home-x => axis.0.home-sw-in
net both-home-x => axis.0.neg-lim-sw-in
net both-home-x => axis.0.pos-lim-sw-in
#*******************
# AXIS Y
#*******************
setp pid.y.Pgain [AXIS_1]P
setp pid.y.Igain [AXIS_1]I
setp pid.y.Dgain [AXIS_1]D
setp pid.y.bias [AXIS_1]BIAS
setp pid.y.FF0 [AXIS_1]FF0
setp pid.y.FF1 [AXIS_1]FF1
setp pid.y.FF2 [AXIS_1]FF2
setp pid.y.deadband [AXIS_1]DEADBAND
setp pid.y.maxoutput [AXIS_1]MAX_OUTPUT
setp pid.y.error-previous-target true
net y-index-enable <=> pid.y.index-enable
net y-enable => pid.y.enable
net y-pos-cmd => pid.y.command
net y-vel-cmd => pid.y.command-deriv
net y-pos-fb => pid.y.feedback
net y-output => pid.y.output
# ---PWM Generator signals/setup---
setp hm2_5i25.0.7i77.0.1.analogout1-scalemax [AXIS_1]OUTPUT_SCALE
setp hm2_5i25.0.7i77.0.1.analogout1-minlim [AXIS_1]OUTPUT_MIN_LIMIT
setp hm2_5i25.0.7i77.0.1.analogout1-maxlim [AXIS_1]OUTPUT_MAX_LIMIT
net y-output => hm2_5i25.0.7i77.0.1.analogout1
net y-pos-cmd axis.1.motor-pos-cmd
net y-enable axis.1.amp-enable-out
# ---Encoder feedback signals/setup---
setp hm2_5i25.0.encoder.01.counter-mode 0
setp hm2_5i25.0.encoder.01.filter 1
setp hm2_5i25.0.encoder.01.index-invert 0
setp hm2_5i25.0.encoder.01.index-mask 0
setp hm2_5i25.0.encoder.01.index-mask-invert 0
setp hm2_5i25.0.encoder.01.scale [AXIS_1]ENCODER_SCALE
net y-pos-fb <= hm2_5i25.0.encoder.01.position
net y-vel-fb <= hm2_5i25.0.encoder.01.velocity
net y-pos-fb => axis.1.motor-pos-fb
net y-index-enable axis.1.index-enable <=> hm2_5i25.0.encoder.01.index-enable
net y-pos-rawcounts <= hm2_5i25.0.encoder.01.rawcounts
# ---setup home / limit switch signals---
net both-home-y => axis.1.home-sw-in
net both-home-y => axis.1.neg-lim-sw-in
net both-home-y => axis.1.pos-lim-sw-in
#*******************
# AXIS Z
#*******************
setp pid.z.Pgain [AXIS_2]P
setp pid.z.Igain [AXIS_2]I
setp pid.z.Dgain [AXIS_2]D
setp pid.z.bias [AXIS_2]BIAS
setp pid.z.FF0 [AXIS_2]FF0
setp pid.z.FF1 [AXIS_2]FF1
setp pid.z.FF2 [AXIS_2]FF2
setp pid.z.deadband [AXIS_2]DEADBAND
setp pid.z.maxoutput [AXIS_2]MAX_OUTPUT
setp pid.z.error-previous-target true
net z-index-enable <=> pid.z.index-enable
net z-enable => pid.z.enable
net z-pos-cmd => pid.z.command
net z-vel-cmd => pid.z.command-deriv
net z-pos-fb => pid.z.feedback
net z-output => pid.z.output
# ---PWM Generator signals/setup---
setp hm2_5i25.0.7i77.0.1.analogout2-scalemax [AXIS_2]OUTPUT_SCALE
setp hm2_5i25.0.7i77.0.1.analogout2-minlim [AXIS_2]OUTPUT_MIN_LIMIT
setp hm2_5i25.0.7i77.0.1.analogout2-maxlim [AXIS_2]OUTPUT_MAX_LIMIT
net z-output => hm2_5i25.0.7i77.0.1.analogout2
net z-pos-cmd axis.2.motor-pos-cmd
net z-enable axis.2.amp-enable-out
# ---Encoder feedback signals/setup---
setp hm2_5i25.0.encoder.02.counter-mode 0
setp hm2_5i25.0.encoder.02.filter 1
setp hm2_5i25.0.encoder.02.index-invert 0
setp hm2_5i25.0.encoder.02.index-mask 0
setp hm2_5i25.0.encoder.02.index-mask-invert 0
setp hm2_5i25.0.encoder.02.scale [AXIS_2]ENCODER_SCALE
net z-pos-fb <= hm2_5i25.0.encoder.02.position
net z-vel-fb <= hm2_5i25.0.encoder.02.velocity
net z-pos-fb => axis.2.motor-pos-fb
net z-index-enable axis.2.index-enable <=> hm2_5i25.0.encoder.02.index-enable
net z-pos-rawcounts <= hm2_5i25.0.encoder.02.rawcounts
# ---setup home / limit switch signals---
net both-home-z => axis.2.home-sw-in
net both-home-z => axis.2.neg-lim-sw-in
net both-home-z => axis.2.pos-lim-sw-in
#*******************
# SPINDLE S
#*******************
setp pid.s.Pgain [SPINDLE_9]P
setp pid.s.Igain [SPINDLE_9]I
setp pid.s.Dgain [SPINDLE_9]D
setp pid.s.bias [SPINDLE_9]BIAS
setp pid.s.FF0 [SPINDLE_9]FF0
setp pid.s.FF1 [SPINDLE_9]FF1
setp pid.s.FF2 [SPINDLE_9]FF2
setp pid.s.deadband [SPINDLE_9]DEADBAND
setp pid.s.maxoutput [SPINDLE_9]MAX_OUTPUT
setp pid.s.error-previous-target true
net spindle-index-enable <=> pid.s.index-enable
net spindle-enable => pid.s.enable
net spindle-vel-cmd-rpm-abs => pid.s.command
net spindle-vel-fb-rpm-abs => pid.s.feedback
net spindle-output <= pid.s.output
# ---PWM Generator signals/setup---
setp hm2_5i25.0.7i77.0.1.analogout5-scalemax [SPINDLE_9]OUTPUT_SCALE
setp hm2_5i25.0.7i77.0.1.analogout5-minlim [SPINDLE_9]OUTPUT_MIN_LIMIT
setp hm2_5i25.0.7i77.0.1.analogout5-maxlim [SPINDLE_9]OUTPUT_MAX_LIMIT
net spindle-output => hm2_5i25.0.7i77.0.1.analogout5
net spindle-enable => hm2_5i25.0.7i77.0.1.spinena
# ---setup spindle control signals---
net spindle-vel-cmd-rps <= motion.spindle-speed-out-rps
net spindle-vel-cmd-rps-abs <= motion.spindle-speed-out-rps-abs
net spindle-vel-cmd-rpm <= motion.spindle-speed-out
net spindle-vel-cmd-rpm-abs <= motion.spindle-speed-out-abs
net spindle-enable <= motion.spindle-on
net spindle-cw <= motion.spindle-forward
net spindle-ccw <= motion.spindle-reverse
net spindle-brake <= motion.spindle-brake
net spindle-revs => motion.spindle-revs
net spindle-at-speed => motion.spindle-at-speed
net spindle-vel-fb-rps => motion.spindle-speed-in
net spindle-index-enable <=> motion.spindle-index-enable
loadrt scale count=1
addf scale.0 servo-thread
setp scale.0.gain 0.0027
net spindle-speed-scale motion.spindle-speed-out => scale.0.in
net spindle-speed-DAC scale.0.out => <your DAC pin name>
# ---Setup spindle at speed signals---
sets spindle-at-speed true
#******************************
# connect miscellaneous signals
#******************************
# ---HALUI signals---
net joint-select-a halui.joint.0.select
net x-is-homed halui.joint.0.is-homed
net jog-x-pos halui.jog.0.plus
net jog-x-neg halui.jog.0.minus
net jog-x-analog halui.jog.0.analog
net joint-select-b halui.joint.1.select
net y-is-homed halui.joint.1.is-homed
net jog-y-pos halui.jog.1.plus
net jog-y-neg halui.jog.1.minus
net jog-y-analog halui.jog.1.analog
net joint-select-c halui.joint.2.select
net z-is-homed halui.joint.2.is-homed
net jog-z-pos halui.jog.2.plus
net jog-z-neg halui.jog.2.minus
net jog-z-analog halui.jog.2.analog
net jog-selected-pos halui.jog.selected.plus
net jog-selected-neg halui.jog.selected.minus
net spindle-manual-cw halui.spindle.forward
net spindle-manual-ccw halui.spindle.reverse
net spindle-manual-stop halui.spindle.stop
net machine-is-on halui.machine.is-on
net jog-speed halui.jog-speed
net MDI-mode halui.mode.is-mdi
# ---coolant signals---
net coolant-mist <= iocontrol.0.coolant-mist
net coolant-flood <= iocontrol.0.coolant-flood
# ---probe signal---
net probe-in => motion.probe-input
# ---motion control signals---
net in-position <= motion.in-position
net machine-is-enabled <= motion.motion-enabled
# ---digital in / out signals---
# ---estop signals---
net estop-out <= iocontrol.0.user-enable-out
net estop-ext => iocontrol.0.emc-enable-in
# ---manual tool change signals---
loadusr -W hal_manualtoolchange
net tool-change-request iocontrol.0.tool-change => hal_manualtoolchange.change
net tool-change-confirmed iocontrol.0.tool-changed <= hal_manualtoolchange.changed
net tool-number iocontrol.0.tool-prep-number => hal_manualtoolchange.number
net tool-prepare-loopback iocontrol.0.tool-prepare => iocontrol.0.tool-prepared
Replied by Catch22 on topic Teco FM50 and Mesa 7i77
For testing just select a clockwise spindle direction:
m3 s1000
in pncconf, uncheck the "Use +- voltage for direction" check box
_BUT_ you may want to make the changes in the hal file so you dont lose any tuning values you have adjusted
I tried to add to the HAL file as I found something that it said to do but now i just get an error.
addf scale.0 servo-thread
setp scale.0.gain 0.0027
net spindle-speed-scale motion.spindle-speed-out => scale.0.in
net spindle-speed-DAC scale.0.out => <your DAC pin name>
# Generated by PNCconf at Sat Apr 18 14:20:32 2020
# If you make changes to this file, they will be
# overwritten when you run PNCconf again
loadrt trivkins
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[TRAJ]AXES
loadrt hostmot2
loadrt hm2_pci config=" num_encoders=6 num_pwmgens=0 num_stepgens=0 sserial_port_0=000xxx"
setp hm2_5i25.0.watchdog.timeout_ns 5000000
loadrt pid names=pid.x,pid.y,pid.z,pid.s
addf hm2_5i25.0.read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf pid.x.do-pid-calcs servo-thread
addf pid.y.do-pid-calcs servo-thread
addf pid.z.do-pid-calcs servo-thread
addf pid.s.do-pid-calcs servo-thread
addf hm2_5i25.0.write servo-thread
# external output signals
# external input signals
# --- ESTOP-EXT ---
net estop-ext <= hm2_5i25.0.7i77.0.0.input-00
# --- BOTH-HOME-X ---
net both-home-x <= hm2_5i25.0.7i77.0.0.input-11-not
# --- BOTH-HOME-Y ---
net both-home-y <= hm2_5i25.0.7i77.0.0.input-12-not
# --- BOTH-HOME-Z ---
net both-home-z <= hm2_5i25.0.7i77.0.0.input-13-not
# --- BOTH-HOME-A ---
net both-home-a <= hm2_5i25.0.7i77.0.0.input-14-not
#*******************
# AXIS X
#*******************
setp pid.x.Pgain [AXIS_0]P
setp pid.x.Igain [AXIS_0]I
setp pid.x.Dgain [AXIS_0]D
setp pid.x.bias [AXIS_0]BIAS
setp pid.x.FF0 [AXIS_0]FF0
setp pid.x.FF1 [AXIS_0]FF1
setp pid.x.FF2 [AXIS_0]FF2
setp pid.x.deadband [AXIS_0]DEADBAND
setp pid.x.maxoutput [AXIS_0]MAX_OUTPUT
setp pid.x.error-previous-target true
net x-index-enable <=> pid.x.index-enable
net x-enable => pid.x.enable
net x-pos-cmd => pid.x.command
net x-vel-cmd => pid.x.command-deriv
net x-pos-fb => pid.x.feedback
net x-output => pid.x.output
# ---PWM Generator signals/setup---
setp hm2_5i25.0.7i77.0.1.analogout0-scalemax [AXIS_0]OUTPUT_SCALE
setp hm2_5i25.0.7i77.0.1.analogout0-minlim [AXIS_0]OUTPUT_MIN_LIMIT
setp hm2_5i25.0.7i77.0.1.analogout0-maxlim [AXIS_0]OUTPUT_MAX_LIMIT
net x-output => hm2_5i25.0.7i77.0.1.analogout0
net x-pos-cmd axis.0.motor-pos-cmd
net x-enable axis.0.amp-enable-out
# enable _all_ sserial pwmgens
net x-enable hm2_5i25.0.7i77.0.1.analogena
# ---Encoder feedback signals/setup---
setp hm2_5i25.0.encoder.00.counter-mode 0
setp hm2_5i25.0.encoder.00.filter 1
setp hm2_5i25.0.encoder.00.index-invert 0
setp hm2_5i25.0.encoder.00.index-mask 0
setp hm2_5i25.0.encoder.00.index-mask-invert 0
setp hm2_5i25.0.encoder.00.scale [AXIS_0]ENCODER_SCALE
net x-pos-fb <= hm2_5i25.0.encoder.00.position
net x-vel-fb <= hm2_5i25.0.encoder.00.velocity
net x-pos-fb => axis.0.motor-pos-fb
net x-index-enable axis.0.index-enable <=> hm2_5i25.0.encoder.00.index-enable
net x-pos-rawcounts <= hm2_5i25.0.encoder.00.rawcounts
# ---setup home / limit switch signals---
net both-home-x => axis.0.home-sw-in
net both-home-x => axis.0.neg-lim-sw-in
net both-home-x => axis.0.pos-lim-sw-in
#*******************
# AXIS Y
#*******************
setp pid.y.Pgain [AXIS_1]P
setp pid.y.Igain [AXIS_1]I
setp pid.y.Dgain [AXIS_1]D
setp pid.y.bias [AXIS_1]BIAS
setp pid.y.FF0 [AXIS_1]FF0
setp pid.y.FF1 [AXIS_1]FF1
setp pid.y.FF2 [AXIS_1]FF2
setp pid.y.deadband [AXIS_1]DEADBAND
setp pid.y.maxoutput [AXIS_1]MAX_OUTPUT
setp pid.y.error-previous-target true
net y-index-enable <=> pid.y.index-enable
net y-enable => pid.y.enable
net y-pos-cmd => pid.y.command
net y-vel-cmd => pid.y.command-deriv
net y-pos-fb => pid.y.feedback
net y-output => pid.y.output
# ---PWM Generator signals/setup---
setp hm2_5i25.0.7i77.0.1.analogout1-scalemax [AXIS_1]OUTPUT_SCALE
setp hm2_5i25.0.7i77.0.1.analogout1-minlim [AXIS_1]OUTPUT_MIN_LIMIT
setp hm2_5i25.0.7i77.0.1.analogout1-maxlim [AXIS_1]OUTPUT_MAX_LIMIT
net y-output => hm2_5i25.0.7i77.0.1.analogout1
net y-pos-cmd axis.1.motor-pos-cmd
net y-enable axis.1.amp-enable-out
# ---Encoder feedback signals/setup---
setp hm2_5i25.0.encoder.01.counter-mode 0
setp hm2_5i25.0.encoder.01.filter 1
setp hm2_5i25.0.encoder.01.index-invert 0
setp hm2_5i25.0.encoder.01.index-mask 0
setp hm2_5i25.0.encoder.01.index-mask-invert 0
setp hm2_5i25.0.encoder.01.scale [AXIS_1]ENCODER_SCALE
net y-pos-fb <= hm2_5i25.0.encoder.01.position
net y-vel-fb <= hm2_5i25.0.encoder.01.velocity
net y-pos-fb => axis.1.motor-pos-fb
net y-index-enable axis.1.index-enable <=> hm2_5i25.0.encoder.01.index-enable
net y-pos-rawcounts <= hm2_5i25.0.encoder.01.rawcounts
# ---setup home / limit switch signals---
net both-home-y => axis.1.home-sw-in
net both-home-y => axis.1.neg-lim-sw-in
net both-home-y => axis.1.pos-lim-sw-in
#*******************
# AXIS Z
#*******************
setp pid.z.Pgain [AXIS_2]P
setp pid.z.Igain [AXIS_2]I
setp pid.z.Dgain [AXIS_2]D
setp pid.z.bias [AXIS_2]BIAS
setp pid.z.FF0 [AXIS_2]FF0
setp pid.z.FF1 [AXIS_2]FF1
setp pid.z.FF2 [AXIS_2]FF2
setp pid.z.deadband [AXIS_2]DEADBAND
setp pid.z.maxoutput [AXIS_2]MAX_OUTPUT
setp pid.z.error-previous-target true
net z-index-enable <=> pid.z.index-enable
net z-enable => pid.z.enable
net z-pos-cmd => pid.z.command
net z-vel-cmd => pid.z.command-deriv
net z-pos-fb => pid.z.feedback
net z-output => pid.z.output
# ---PWM Generator signals/setup---
setp hm2_5i25.0.7i77.0.1.analogout2-scalemax [AXIS_2]OUTPUT_SCALE
setp hm2_5i25.0.7i77.0.1.analogout2-minlim [AXIS_2]OUTPUT_MIN_LIMIT
setp hm2_5i25.0.7i77.0.1.analogout2-maxlim [AXIS_2]OUTPUT_MAX_LIMIT
net z-output => hm2_5i25.0.7i77.0.1.analogout2
net z-pos-cmd axis.2.motor-pos-cmd
net z-enable axis.2.amp-enable-out
# ---Encoder feedback signals/setup---
setp hm2_5i25.0.encoder.02.counter-mode 0
setp hm2_5i25.0.encoder.02.filter 1
setp hm2_5i25.0.encoder.02.index-invert 0
setp hm2_5i25.0.encoder.02.index-mask 0
setp hm2_5i25.0.encoder.02.index-mask-invert 0
setp hm2_5i25.0.encoder.02.scale [AXIS_2]ENCODER_SCALE
net z-pos-fb <= hm2_5i25.0.encoder.02.position
net z-vel-fb <= hm2_5i25.0.encoder.02.velocity
net z-pos-fb => axis.2.motor-pos-fb
net z-index-enable axis.2.index-enable <=> hm2_5i25.0.encoder.02.index-enable
net z-pos-rawcounts <= hm2_5i25.0.encoder.02.rawcounts
# ---setup home / limit switch signals---
net both-home-z => axis.2.home-sw-in
net both-home-z => axis.2.neg-lim-sw-in
net both-home-z => axis.2.pos-lim-sw-in
#*******************
# SPINDLE S
#*******************
setp pid.s.Pgain [SPINDLE_9]P
setp pid.s.Igain [SPINDLE_9]I
setp pid.s.Dgain [SPINDLE_9]D
setp pid.s.bias [SPINDLE_9]BIAS
setp pid.s.FF0 [SPINDLE_9]FF0
setp pid.s.FF1 [SPINDLE_9]FF1
setp pid.s.FF2 [SPINDLE_9]FF2
setp pid.s.deadband [SPINDLE_9]DEADBAND
setp pid.s.maxoutput [SPINDLE_9]MAX_OUTPUT
setp pid.s.error-previous-target true
net spindle-index-enable <=> pid.s.index-enable
net spindle-enable => pid.s.enable
net spindle-vel-cmd-rpm-abs => pid.s.command
net spindle-vel-fb-rpm-abs => pid.s.feedback
net spindle-output <= pid.s.output
# ---PWM Generator signals/setup---
setp hm2_5i25.0.7i77.0.1.analogout5-scalemax [SPINDLE_9]OUTPUT_SCALE
setp hm2_5i25.0.7i77.0.1.analogout5-minlim [SPINDLE_9]OUTPUT_MIN_LIMIT
setp hm2_5i25.0.7i77.0.1.analogout5-maxlim [SPINDLE_9]OUTPUT_MAX_LIMIT
net spindle-output => hm2_5i25.0.7i77.0.1.analogout5
net spindle-enable => hm2_5i25.0.7i77.0.1.spinena
# ---setup spindle control signals---
net spindle-vel-cmd-rps <= motion.spindle-speed-out-rps
net spindle-vel-cmd-rps-abs <= motion.spindle-speed-out-rps-abs
net spindle-vel-cmd-rpm <= motion.spindle-speed-out
net spindle-vel-cmd-rpm-abs <= motion.spindle-speed-out-abs
net spindle-enable <= motion.spindle-on
net spindle-cw <= motion.spindle-forward
net spindle-ccw <= motion.spindle-reverse
net spindle-brake <= motion.spindle-brake
net spindle-revs => motion.spindle-revs
net spindle-at-speed => motion.spindle-at-speed
net spindle-vel-fb-rps => motion.spindle-speed-in
net spindle-index-enable <=> motion.spindle-index-enable
loadrt scale count=1
addf scale.0 servo-thread
setp scale.0.gain 0.0027
net spindle-speed-scale motion.spindle-speed-out => scale.0.in
net spindle-speed-DAC scale.0.out => <your DAC pin name>
# ---Setup spindle at speed signals---
sets spindle-at-speed true
#******************************
# connect miscellaneous signals
#******************************
# ---HALUI signals---
net joint-select-a halui.joint.0.select
net x-is-homed halui.joint.0.is-homed
net jog-x-pos halui.jog.0.plus
net jog-x-neg halui.jog.0.minus
net jog-x-analog halui.jog.0.analog
net joint-select-b halui.joint.1.select
net y-is-homed halui.joint.1.is-homed
net jog-y-pos halui.jog.1.plus
net jog-y-neg halui.jog.1.minus
net jog-y-analog halui.jog.1.analog
net joint-select-c halui.joint.2.select
net z-is-homed halui.joint.2.is-homed
net jog-z-pos halui.jog.2.plus
net jog-z-neg halui.jog.2.minus
net jog-z-analog halui.jog.2.analog
net jog-selected-pos halui.jog.selected.plus
net jog-selected-neg halui.jog.selected.minus
net spindle-manual-cw halui.spindle.forward
net spindle-manual-ccw halui.spindle.reverse
net spindle-manual-stop halui.spindle.stop
net machine-is-on halui.machine.is-on
net jog-speed halui.jog-speed
net MDI-mode halui.mode.is-mdi
# ---coolant signals---
net coolant-mist <= iocontrol.0.coolant-mist
net coolant-flood <= iocontrol.0.coolant-flood
# ---probe signal---
net probe-in => motion.probe-input
# ---motion control signals---
net in-position <= motion.in-position
net machine-is-enabled <= motion.motion-enabled
# ---digital in / out signals---
# ---estop signals---
net estop-out <= iocontrol.0.user-enable-out
net estop-ext => iocontrol.0.emc-enable-in
# ---manual tool change signals---
loadusr -W hal_manualtoolchange
net tool-change-request iocontrol.0.tool-change => hal_manualtoolchange.change
net tool-change-confirmed iocontrol.0.tool-changed <= hal_manualtoolchange.changed
net tool-number iocontrol.0.tool-prep-number => hal_manualtoolchange.number
net tool-prepare-loopback iocontrol.0.tool-prepare => iocontrol.0.tool-prepared
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17977
- Thank you received: 5275
18 Apr 2020 19:26 #164489
by PCW
Replied by PCW on topic Teco FM50 and Mesa 7i77
You do not need a scale component to scale the spindle output
This is done in pncconf when you setup the spindle or can be done by
editing the spindle section of the INI file
Can you post the spindle section of your INI file here?
This is done in pncconf when you setup the spindle or can be done by
editing the spindle section of the INI file
Can you post the spindle section of your INI file here?
The following user(s) said Thank You: Catch22
Please Log in or Create an account to join the conversation.
- Catch22
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 222
- Thank you received: 17
18 Apr 2020 20:37 #164510
by Catch22
here it is.
Spindle
#********************
[SPINDLE_9]
P = 0.0
I = 0.0
D = 0.0
FF0 = 1.0
FF1 = 0.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 3600.0
OUTPUT_SCALE = 3600
OUTPUT_MIN_LIMIT = 0
OUTPUT_MAX_LIMIT = 3600
Replied by Catch22 on topic Teco FM50 and Mesa 7i77
You do not need a scale component to scale the spindle output
This is done in pncconf when you setup the spindle or can be done by
editing the spindle section of the INI file
Can you post the spindle section of your INI file here?
here it is.
Spindle
#********************
[SPINDLE_9]
P = 0.0
I = 0.0
D = 0.0
FF0 = 1.0
FF1 = 0.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 3600.0
OUTPUT_SCALE = 3600
OUTPUT_MIN_LIMIT = 0
OUTPUT_MAX_LIMIT = 3600
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17977
- Thank you received: 5275
18 Apr 2020 23:16 #164538
by PCW
Replied by PCW on topic Teco FM50 and Mesa 7i77
Right so that is setup for 3600 RPM at 10V
so is you do a M3 S1800 you should get 5V out of AOUT5
so is you do a M3 S1800 you should get 5V out of AOUT5
The following user(s) said Thank You: Catch22
Please Log in or Create an account to join the conversation.
- Catch22
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 222
- Thank you received: 17
18 Apr 2020 23:44 - 18 Apr 2020 23:58 #164542
by Catch22
Ok so I did what you said and got 4v at 1800 and 1v at 900 but the spindle speed doesn't change, it was running at full rpm.
The multimeter I'm using isn't really good and I think the batteries might be getting low so that could factor in on the volts being a bit off.
Replied by Catch22 on topic Teco FM50 and Mesa 7i77
Right so that is setup for 3600 RPM at 10V
so is you do a M3 S1800 you should get 5V out of AOUT5
Ok so I did what you said and got 4v at 1800 and 1v at 900 but the spindle speed doesn't change, it was running at full rpm.
The multimeter I'm using isn't really good and I think the batteries might be getting low so that could factor in on the volts being a bit off.
Last edit: 18 Apr 2020 23:58 by Catch22.
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17977
- Thank you received: 5275
19 Apr 2020 01:23 #164558
by PCW
Replied by PCW on topic Teco FM50 and Mesa 7i77
It sounds like the drive is not listening to the analog input.
That's likely a drive a setup issue
That's likely a drive a setup issue
The following user(s) said Thank You: Catch22
Please Log in or Create an account to join the conversation.
- Catch22
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 222
- Thank you received: 17
19 Apr 2020 01:52 #164563
by Catch22
Ok thanks, I will go through the parameters again and see if I missed something.
Replied by Catch22 on topic Teco FM50 and Mesa 7i77
It sounds like the drive is not listening to the analog input.
That's likely a drive a setup issue
Ok thanks, I will go through the parameters again and see if I missed something.
Please Log in or Create an account to join the conversation.
- Catch22
-
Topic Author
- Offline
- Elite Member
-
Less
More
- Posts: 222
- Thank you received: 17
19 Apr 2020 02:17 #164567
by Catch22
That's what it was, had to change one parameter and it's working.
But reverse still don't work, is this something that has to be added to the HAL file or possibly the INI file?
Replied by Catch22 on topic Teco FM50 and Mesa 7i77
It sounds like the drive is not listening to the analog input.
That's likely a drive a setup issue
Ok thanks, I will go through the parameters again and see if I missed something.
That's what it was, had to change one parameter and it's working.
But reverse still don't work, is this something that has to be added to the HAL file or possibly the INI file?
Please Log in or Create an account to join the conversation.
Moderators: cmorley
Time to create page: 0.143 seconds