tune stepper function
- PCW
-

- Away
- Moderator
-

- Posts: 17978
- Thank you received: 5277
So 10500mm/min is my max. velocity ...
Now I wanted to know, whether things change with different accelerations.
Short answer: it does not.
No matter, whether I use 50mm/s², 500mm/s² or 5000mm/s² - max velocity does not change.
I tried to lower resolution / microsteps to see, whether I could break the limit, but it does not make any difference. Lower resolution fails beyond 10500mm/min too.
Maximum velocity can be dependent on acceleration with simple open loop step motor drives
since they lose torque very quickly with increasing RPM. Depending on inertial load, they can stall
during acceleration at higher velocities since the have insufficient torque.
I suspect you are not using simple open loop step drives
Please Log in or Create an account to join the conversation.
- Reinhard
- Offline
- Platinum Member
-

- Posts: 508
- Thank you received: 94
Hm, isn't that true for every stepper system?... with simple open loop step motor drives
since they lose torque very quickly with increasing RPM.
.
Well, I do. On my cheap chinese 3D-printer ...I suspect you are not using simple open loop step drives
... but I can't take that for serious cnc machines. They are more like crap
- and yes, they loose steps very easily.
My plans are to integrate linuxcnc into closed loop. But for that I have to finish electronics, which is not my skil.
Please Log in or Create an account to join the conversation.
- Reinhard
- Offline
- Platinum Member
-
- Posts: 508
- Thank you received: 94
.
Timings are set according driver specs.
What causes the braking ramp slowing down to fast, so that a slow movement is necessary.
And where is the speed for that slow motion configured?
Slow-motion speed is 12.7°/s
After a quick grep I found that numbers in halfile at a line like this:
setp pid.a.maxerror 0.0127@cmorley
Chris, would it be possible, to link sampling of halscope to run-button of axis-tune dialog?
Would be nice to be able to examine recorded data after stopping motor without any hurry.
Attachments:
Please Log in or Create an account to join the conversation.
- Reinhard
- Offline
- Platinum Member
-
- Posts: 508
- Thank you received: 94

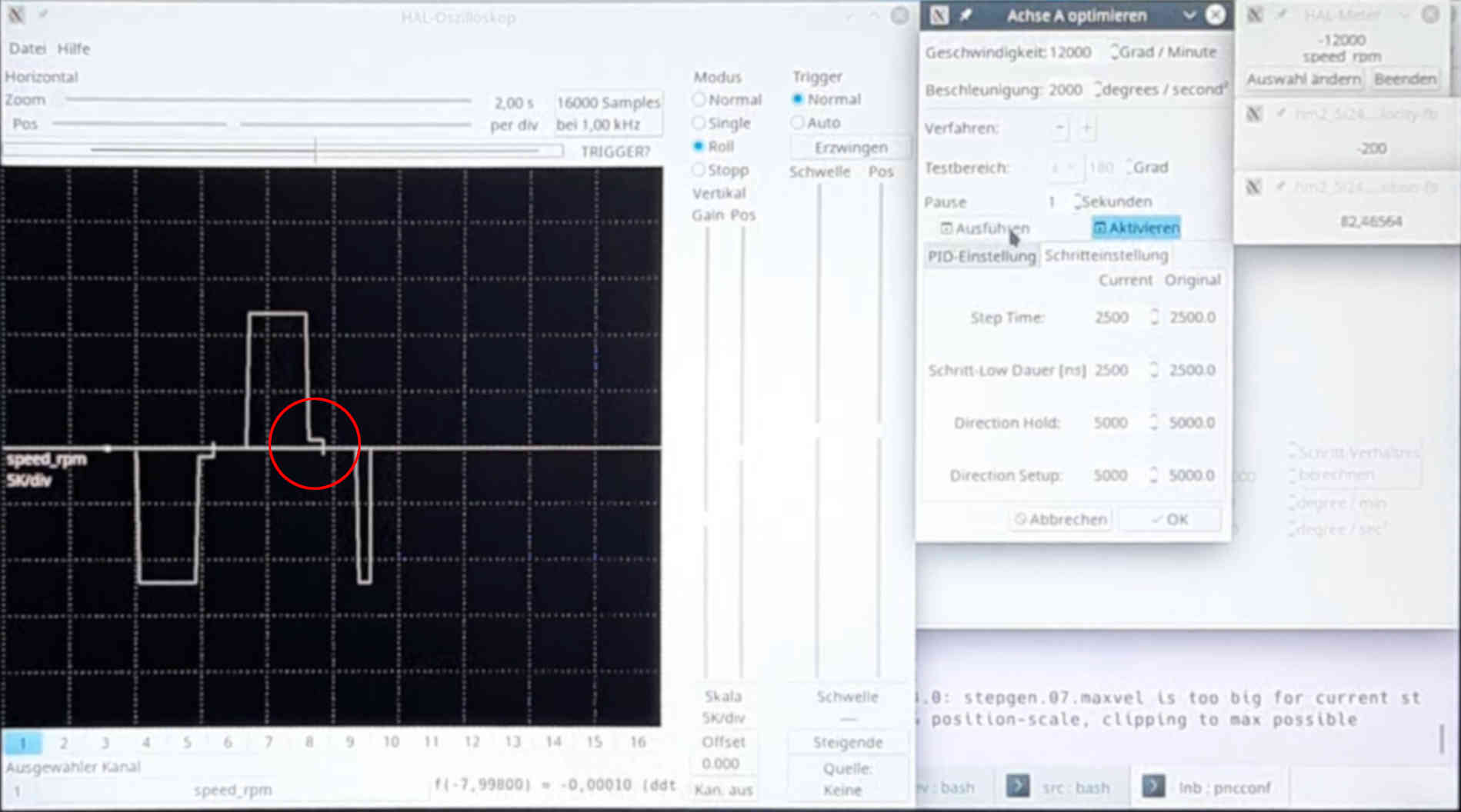
So I could grab a more detailled picture of what is happening:
.
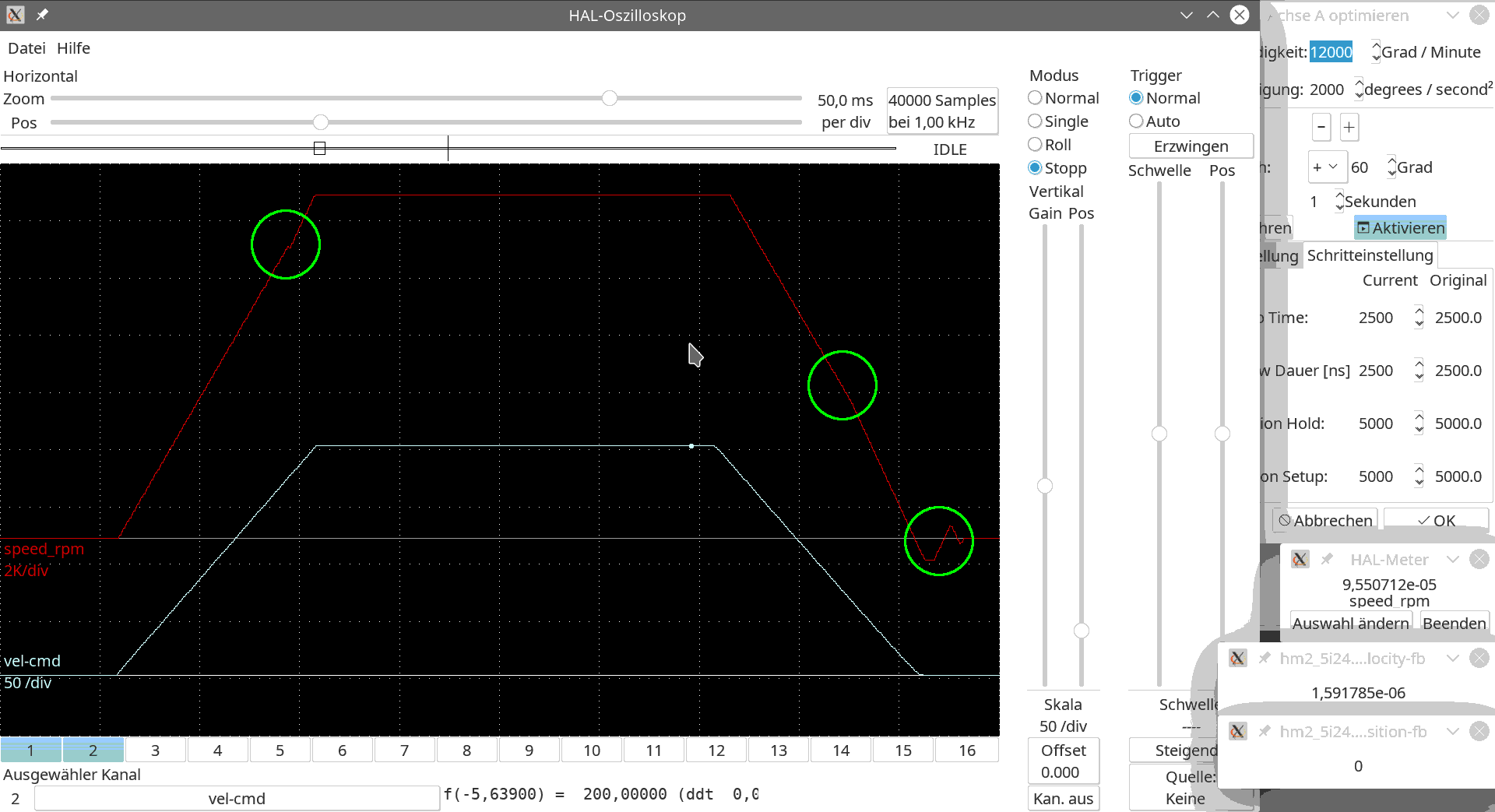
Any hints, how I could find out, why the motor does not follow commanded velocity?
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
- Posts: 17978
- Thank you received: 5277
(that is your step timings bound the maximum velocity so the PID does bad things)
Please Log in or Create an account to join the conversation.
- Reinhard
- Offline
- Platinum Member
-
- Posts: 508
- Thank you received: 94
What do I need to add to scope to see the output of PID?
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
- Posts: 17978
- Thank you received: 5277
( fed forward via the PIDs FF1 = 1.00 parameter )
But if you have the stepgen's steplen and stepspace
settings too long for the commanded rate, the stepgen will be
unable to follow.
Please Log in or Create an account to join the conversation.
- Reinhard
- Offline
- Platinum Member
-
- Posts: 508
- Thank you received: 94
I haven't heard similar restrictions before.
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
- Posts: 17978
- Thank you received: 5277
limitations. That is if I have a step length of 2.5 usec and a step space of 2.5 usec, the
minimum total period is 5 usec or 200 KHz. If I command a higher speed, the step generator
will lag behind. In addition there needs to be some control overhead so the actual maximum speed
will need to be somewhat lower than 200K steps per second.
Please Log in or Create an account to join the conversation.
- Reinhard
- Offline
- Platinum Member
-
- Posts: 508
- Thank you received: 94
But the control overhead - is that linuxcnc specific?
Never heard that restriction before.
Please Log in or Create an account to join the conversation.