How to find the right Step Time/Step Space?
- machinedude
-

- Offline
- Platinum Member
-

Less
More
- Posts: 715
- Thank you received: 312
23 Feb 2024 17:24 #294091
by machinedude
Replied by machinedude on topic How to find the right Step Time/Step Space?
with my other settings i had to run the servo_period at 2000000 and the most i could get was 400 IMP on the X and Y and 250 on my Z
after playing with these settings all morning i managed to get my Servo_period down to 1800000 and can get 800 IMP on X and Y and 400 IPM on my Z with no warnings coming up.
that's a pretty big improvement by being stubborn and pigheaded like i am") i think the 1800000 servo_period is older computer related, it seemed like you could get by as long as it was not over 2000000 from looking at the topic on here.
i think the 1800000 servo_period is older computer related, it seemed like you could get by as long as it was not over 2000000 from looking at the topic on here.
after playing with these settings all morning i managed to get my Servo_period down to 1800000 and can get 800 IMP on X and Y and 400 IPM on my Z with no warnings coming up.
that's a pretty big improvement by being stubborn and pigheaded like i am
i think the 1800000 servo_period is older computer related, it seemed like you could get by as long as it was not over 2000000 from looking at the topic on here. Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17985
- Thank you received: 5278
23 Feb 2024 17:37 - 23 Feb 2024 17:38 #294092
by PCW
Replied by PCW on topic How to find the right Step Time/Step Space?
The setup and hold times have negligible effect on performance
so there no real disadvantage to using larger values (so say 10000 is fine
for almost any system)
The maximum step rate is limited by the step time and step space
values. The maximum step rate is 1/(steptime+stepspace).
This is a simple physical limitation, that is you cannot issue steps
faster than the 1/(steptime+stepspace) limit without violating the
timing. This is independent of hardware limits.
In general there is no advantage to going beyond say 1/32 microstepping
(6400 steps per turn on a 200 step motor)
so there no real disadvantage to using larger values (so say 10000 is fine
for almost any system)
The maximum step rate is limited by the step time and step space
values. The maximum step rate is 1/(steptime+stepspace).
This is a simple physical limitation, that is you cannot issue steps
faster than the 1/(steptime+stepspace) limit without violating the
timing. This is independent of hardware limits.
In general there is no advantage to going beyond say 1/32 microstepping
(6400 steps per turn on a 200 step motor)
Last edit: 23 Feb 2024 17:38 by PCW.
Please Log in or Create an account to join the conversation.
- machinedude
-
- Offline
- Platinum Member
-
Less
More
- Posts: 715
- Thank you received: 312
23 Feb 2024 18:02 - 23 Feb 2024 18:40 #294096
by machinedude
Replied by machinedude on topic How to find the right Step Time/Step Space?
i seen some talk on that subject on micro stepping with open loop systems but how about when you have a closed loop stepping system? i am pretty sure i remember seeing something about encoder resolution playing a factor in this puzzle as well.
on the motors and drive i am using the encoder only has 1000 PPR but is a quadrature encoder so the total PPR is 4000 so how much micro stepping can you really get and still be accurate?
on the motors and drive i am using the encoder only has 1000 PPR but is a quadrature encoder so the total PPR is 4000 so how much micro stepping can you really get and still be accurate?
Last edit: 23 Feb 2024 18:40 by machinedude. Reason: more info
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17985
- Thank you received: 5278
23 Feb 2024 18:30 #294100
by PCW
Replied by PCW on topic How to find the right Step Time/Step Space?
For closed loop steppers there would be no advantage to
having more steps per turn than the encoder resolution.
having more steps per turn than the encoder resolution.
The following user(s) said Thank You: machinedude
Please Log in or Create an account to join the conversation.
- machinedude
-
- Offline
- Platinum Member
-
Less
More
- Posts: 715
- Thank you received: 312
23 Feb 2024 18:42 #294101
by machinedude
Replied by machinedude on topic How to find the right Step Time/Step Space?
so in my case 4000 more or less. i was thinking that when i was reading the manuals and was shocked a little bit by that. i guess this is why they are cheap.
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17985
- Thank you received: 5278
23 Feb 2024 19:09 #294103
by PCW
Replied by PCW on topic How to find the right Step Time/Step Space?
Higher resolutions would not make much difference.
It's not like higher resolutions would improve accuracy
on the class of machines that use step/drives. Mechanical
errors are typically going to be much larger than the
resolution even at 4000 counts/turn.
It's not like higher resolutions would improve accuracy
on the class of machines that use step/drives. Mechanical
errors are typically going to be much larger than the
resolution even at 4000 counts/turn.
Please Log in or Create an account to join the conversation.
- machinedude
-
- Offline
- Platinum Member
-
Less
More
- Posts: 715
- Thank you received: 312
23 Feb 2024 19:26 #294107
by machinedude
Replied by machinedude on topic How to find the right Step Time/Step Space?
i agree 100% the more connections you have the more the error that accumulates as a result. so if i can't get it more accurate i will make it fast and fun to watch you can probably negate a lot with cutter comp anyways.
you can probably negate a lot with cutter comp anyways. Please Log in or Create an account to join the conversation.
- rodw
-

- Away
- Platinum Member
-
Less
More
- Posts: 12027
- Thank you received: 4103
23 Feb 2024 20:10 - 23 Feb 2024 20:14 #294109
by rodw
Replied by rodw on topic How to find the right Step Time/Step Space?
Yes, as your timings are increased, the maximum frequency is reduced. This kinda makes sense because the overall step pulse becomes longer so fewer can fit into one second.
I think a lot of recommendations are based on very safe values because we want to make sure machines move!
After a lot of experimentation to find the optimum values for my open loop hardware, with a Mesa card, I settled on
25 x microstepping (5000 pulses/rev)
DIRSETUP = 500
DIRHOLD = 500
STEPLEN = 1000
STEPSPACE = 1000
STEP_SCALE = 1000
This gave me a max velocity of 60mm/sec (3600mm/min) on a 5mm ball screw on my plasma Z axis
Experimenting to get the max velocity got much higher values but it all went to shit once let loose in the real world with missing steps on uptravel.
The other thing I found on my closed loop ethercat mill conversion was that I was getting following errors on homing. I decided this was probably due to excessive acceleration settings whch meant on decelleration, table inertia prevented it from following the commanded profile. Sure enough, reducing the max accelleration solved the problem.
So whilst the maths will get you so far, you have to test in your application to fine tune.
I think a lot of recommendations are based on very safe values because we want to make sure machines move!
After a lot of experimentation to find the optimum values for my open loop hardware, with a Mesa card, I settled on
25 x microstepping (5000 pulses/rev)
DIRSETUP = 500
DIRHOLD = 500
STEPLEN = 1000
STEPSPACE = 1000
STEP_SCALE = 1000
This gave me a max velocity of 60mm/sec (3600mm/min) on a 5mm ball screw on my plasma Z axis
Experimenting to get the max velocity got much higher values but it all went to shit once let loose in the real world with missing steps on uptravel.
The other thing I found on my closed loop ethercat mill conversion was that I was getting following errors on homing. I decided this was probably due to excessive acceleration settings whch meant on decelleration, table inertia prevented it from following the commanded profile. Sure enough, reducing the max accelleration solved the problem.
So whilst the maths will get you so far, you have to test in your application to fine tune.
Last edit: 23 Feb 2024 20:14 by rodw.
The following user(s) said Thank You: rdtsc
Please Log in or Create an account to join the conversation.
- visharc
- Offline
- New Member
-

Less
More
- Posts: 4
- Thank you received: 0
05 Apr 2024 11:45 - 05 Apr 2024 11:50 #297639
by visharc
Replied by visharc on topic How to find the right Step Time/Step Space?
Hello !!
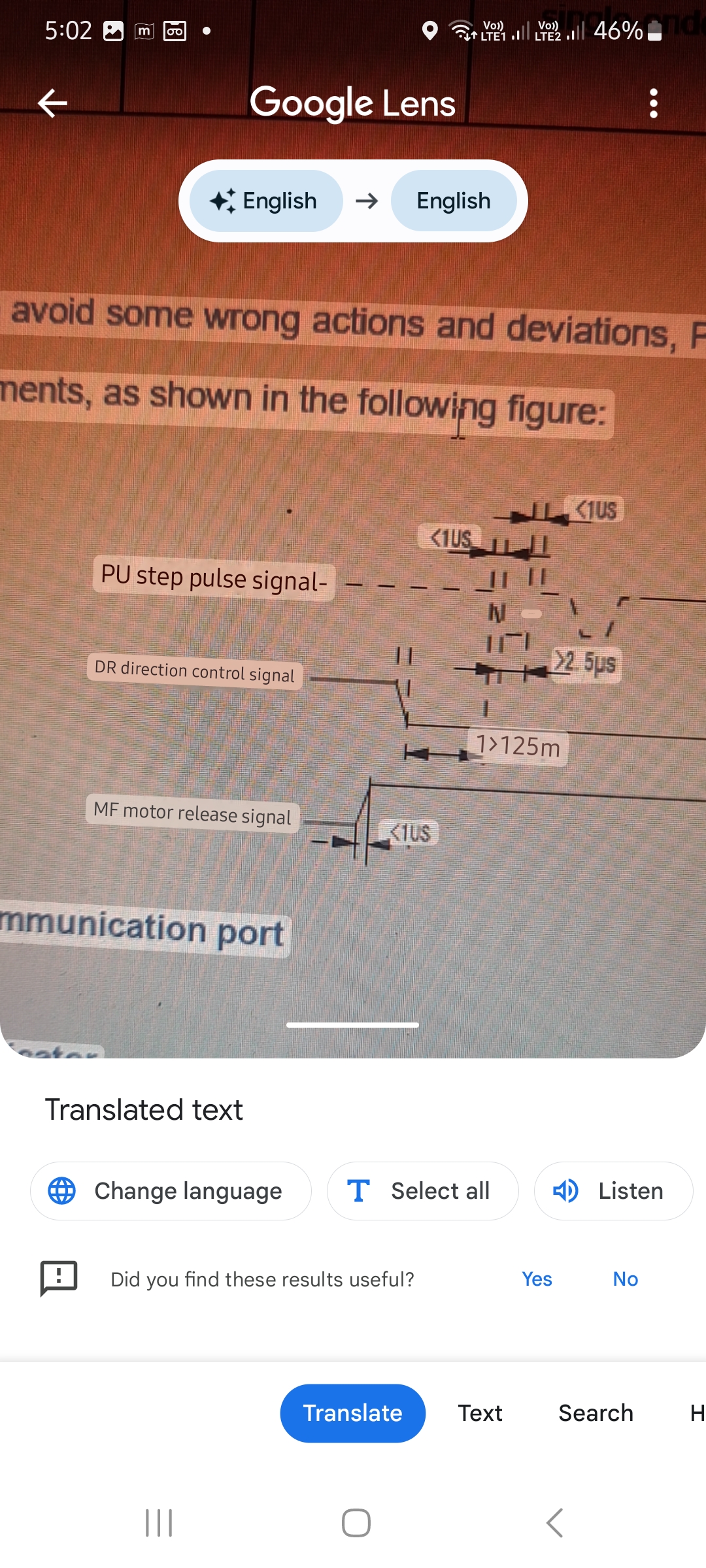
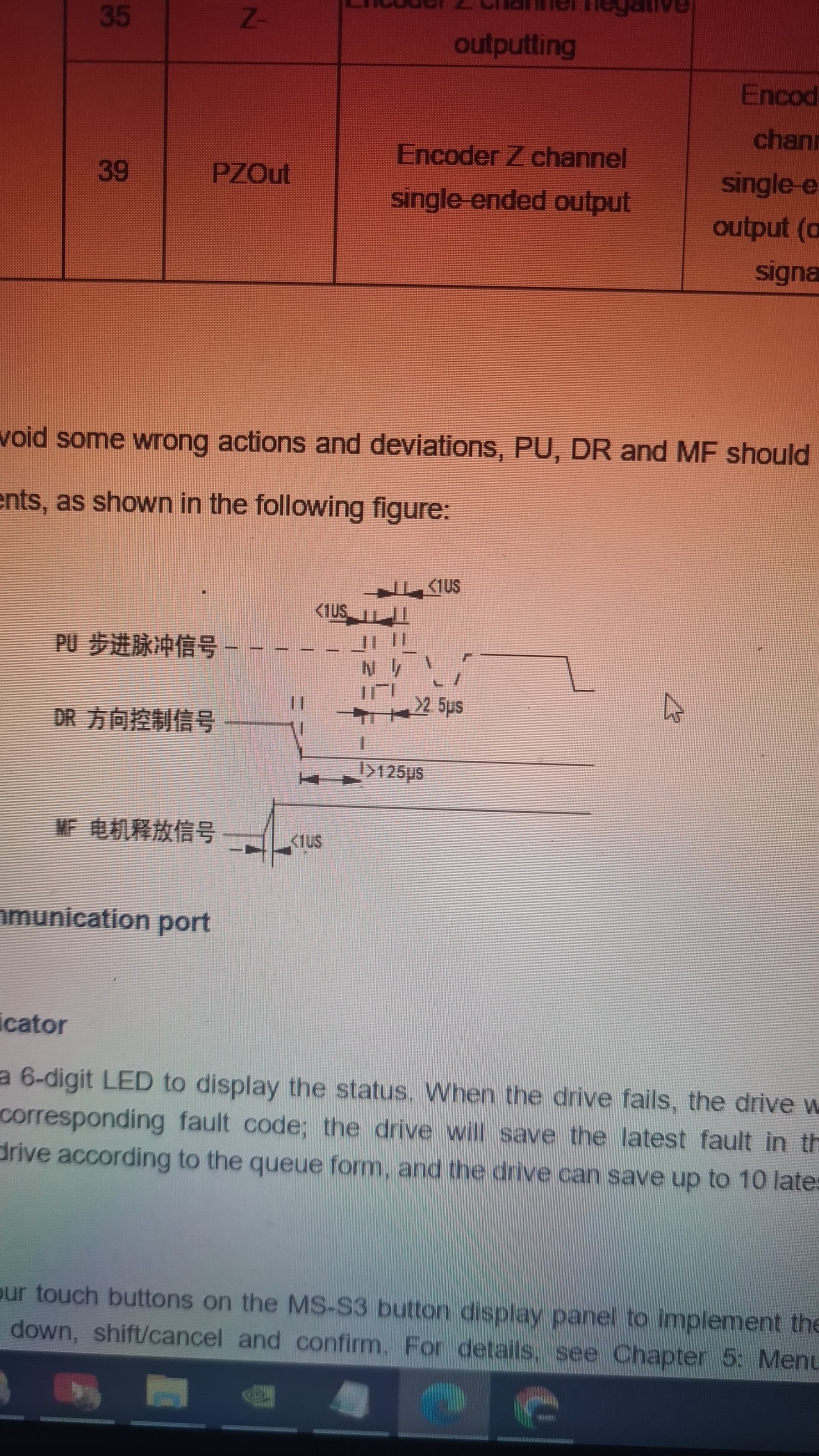
i am new here i also had a question about this i have attached a photograph from my driver's manual but not sure what to conclude about
step time
Step space
direction hold
Direction setup
Can you please help me
i am new here i also had a question about this i have attached a photograph from my driver's manual but not sure what to conclude about
step time
Step space
direction hold
Direction setup
Can you please help me
Attachments:
Last edit: 05 Apr 2024 11:50 by visharc.
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17985
- Thank you received: 5278
05 Apr 2024 12:44 #297642
by PCW
Replied by PCW on topic How to find the right Step Time/Step Space?
The specifications miss the minimum step pulse high
time and direction hold time but this should work:
Steptime = 5000
Stepspace = 5000
Dirsetup = 130000
Dirhold = 130000
Note that the picture shows active low
step pulses so make sure you invert
the step outputs (LinuxCNC default is active high)
time and direction hold time but this should work:
Steptime = 5000
Stepspace = 5000
Dirsetup = 130000
Dirhold = 130000
Note that the picture shows active low
step pulses so make sure you invert
the step outputs (LinuxCNC default is active high)
The following user(s) said Thank You: visharc
Please Log in or Create an account to join the conversation.
Moderators: cmorley
Time to create page: 0.665 seconds