7i92 default firmware version and pncconf
- hwe
- Offline
- Junior Member
-

Less
More
- Posts: 37
- Thank you received: 0
08 Oct 2021 18:01 - 08 Oct 2021 18:04 #222571
by hwe
Replied by hwe on topic 7i92 default firmware version and pncconf
Looks like this now:
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
loadrt hostmot2
loadrt hm2_eth board_ip="192.168.1.121" config=" num_encoders=1 num_pwmgens=0 num_stepgens=5 sserial_port_0=00xxxx"
#setp hm2_5i25.0.watchdog.timeout_ns 5000000
loadrt pid names=pid.x,pid.y,pid.z,pid.s
addf hm2_5i25.0.read servo-thread
addf motion-command-handler servo-thread#
EDIT: corrected to board_ip=192.168.1.121 but no success. Same error.
So - first complained about watchdog.timeout - I commented out
Now - complains about "hm2_5i25.0.read not found"
Is there a tutorial somewhere I can follow to setup a simple 7i92 configuation ?
Shouldn't be so hard to config this .....
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
loadrt hostmot2
loadrt hm2_eth board_ip="192.168.1.121" config=" num_encoders=1 num_pwmgens=0 num_stepgens=5 sserial_port_0=00xxxx"
#setp hm2_5i25.0.watchdog.timeout_ns 5000000
loadrt pid names=pid.x,pid.y,pid.z,pid.s
addf hm2_5i25.0.read servo-thread
addf motion-command-handler servo-thread#
EDIT: corrected to board_ip=192.168.1.121 but no success. Same error.
So - first complained about watchdog.timeout - I commented out
Now - complains about "hm2_5i25.0.read not found"
Is there a tutorial somewhere I can follow to setup a simple 7i92 configuation ?
Shouldn't be so hard to config this .....
Last edit: 08 Oct 2021 18:04 by hwe.
Please Log in or Create an account to join the conversation.
- hwe
- Offline
- Junior Member
-
Less
More
- Posts: 37
- Thank you received: 0
08 Oct 2021 18:06 - 08 Oct 2021 18:11 #222573
by hwe
Replied by hwe on topic 7i92 default firmware version and pncconf
I did not yet flash the 7i92 with any linuxcnc-software.
Is this required ?
I think the default config should be fine just to get out some signals of the 7i92.
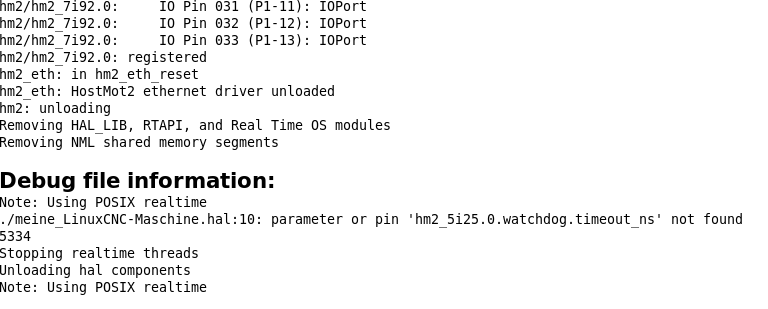
Added the error message in screenshot.
One more thing: my lan-port is "enp0s25" instead of "eth0" - is this a problem ?
Is this required ?
I think the default config should be fine just to get out some signals of the 7i92.
Added the error message in screenshot.
One more thing: my lan-port is "enp0s25" instead of "eth0" - is this a problem ?
Attachments:
Last edit: 08 Oct 2021 18:11 by hwe.
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-

Less
More
- Posts: 17996
- Thank you received: 5283
08 Oct 2021 18:14 #222575
by PCW
Replied by PCW on topic 7i92 default firmware version and pncconf
Look's like you made a 5i25 PCI card configuration.
To use that hal file, you would need to replace
all instances of '5i25" with "7i92".
To use that hal file, you would need to replace
all instances of '5i25" with "7i92".
Please Log in or Create an account to join the conversation.
- hwe
- Offline
- Junior Member
-
Less
More
- Posts: 37
- Thank you received: 0
08 Oct 2021 18:47 #222577
by hwe
Replied by hwe on topic 7i92 default firmware version and pncconf
You are my hero - it works !
Maybe with all the fiddling with IPs and so on, I missed to choose 7i92 for my latest pncconfig.
dummy me !
Maybe with all the fiddling with IPs and so on, I missed to choose 7i92 for my latest pncconfig.
dummy me !
Please Log in or Create an account to join the conversation.
- hwe
- Offline
- Junior Member
-
Less
More
- Posts: 37
- Thank you received: 0
08 Oct 2021 20:33 - 08 Oct 2021 20:42 #222580
by hwe
Replied by hwe on topic 7i92 default firmware version and pncconf
Machine is running now, but as expected the pin-out of the "7i76x2 with one 7i76" is not optimal.
It would be best if I could remove 2 of the 5 dir/step-gens, and get 4 GPIOs instead.
I want 1x GPIO for "all limits" to not run against the wall, and 1x GPIO for Z-axis touch-off.
What would be the steps to do this ?
Do I need to reconfigure the VHDL-code and create a new FPGA image, or can I reconfigure with HAL settings only ?
For the G540x2 configuration I do not understand the assignment between the function and the pin of the 7i92.
Or is it just as simple as that the first upper left function (e.g. GPIO) is PIN1 and the lower left (e.g. STEPGEN A) is PIN12 ?
It would be best if I could remove 2 of the 5 dir/step-gens, and get 4 GPIOs instead.
I want 1x GPIO for "all limits" to not run against the wall, and 1x GPIO for Z-axis touch-off.
What would be the steps to do this ?
Do I need to reconfigure the VHDL-code and create a new FPGA image, or can I reconfigure with HAL settings only ?
For the G540x2 configuration I do not understand the assignment between the function and the pin of the 7i92.
Or is it just as simple as that the first upper left function (e.g. GPIO) is PIN1 and the lower left (e.g. STEPGEN A) is PIN12 ?
Last edit: 08 Oct 2021 20:42 by hwe.
Please Log in or Create an account to join the conversation.
- hwe
- Offline
- Junior Member
-
Less
More
- Posts: 37
- Thank you received: 0
08 Oct 2021 20:45 - 08 Oct 2021 21:02 #222581
by hwe
Replied by hwe on topic 7i92 default firmware version and pncconf
Okay, I found it - one can select the number of stepper in the config-page.
Selecting 3 steppers gives me 4 GPIOs - just perfect !
EDIT: Does not seem to be as easy as expected. Get "Axis at limit" errors, even if there is nothing connected to the pin.
But the configuration is as expected:
halcmd: loadrt hm2_eth board_ip="192.168.1.121" config=" num_encoders=0 num_pwmgens=0 num_stepgens=3"
Note: Using POSIX realtime
hm2_eth: dlopen: /usr/lib/linuxcnc/modules/hm2_eth.so: undefined symbol: hm2_register
<stdin>:1: waitpid failed /usr/bin/rtapi_app hm2_eth
<stdin>:1: /usr/bin/rtapi_app exited without becoming ready
<stdin>:1: insmod for hm2_eth failed, returned -1
halcmd: loadrt hostmot2
Note: Using POSIX realtime
hm2: loading Mesa HostMot2 driver version 0.15
halcmd: loadrt hm2_eth board_ip="192.168.1.121" config=" num_encoders=0 num_pwmgens=0 num_stepgens=3"
hm2_eth: loading Mesa AnyIO HostMot2 ethernet driver version 0.2
hm2_eth: 192.168.1.121: INFO: Hardware address (MAC): 00:60:1b:13:06:39
hm2_eth: discovered 7I92
hm2/hm2_7i92.0: Low Level init 0.15
hm2/hm2_7i92.0: Smart Serial Firmware Version 43
hm2/hm2_7i92.0: 34 I/O Pins used:
hm2/hm2_7i92.0: IO Pin 000 (P2-01): StepGen #0, pin Direction (Output)
hm2/hm2_7i92.0: IO Pin 001 (P2-14): StepGen #0, pin Step (Output)
hm2/hm2_7i92.0: IO Pin 002 (P2-02): StepGen #1, pin Direction (Output)
hm2/hm2_7i92.0: IO Pin 003 (P2-15): StepGen #1, pin Step (Output)
hm2/hm2_7i92.0: IO Pin 004 (P2-03): StepGen #2, pin Direction (Output)
hm2/hm2_7i92.0: IO Pin 005 (P2-16): StepGen #2, pin Step (Output)
hm2/hm2_7i92.0: IO Pin 006 (P2-04): IOPort
hm2/hm2_7i92.0: IO Pin 007 (P2-17): IOPort
hm2/hm2_7i92.0: IO Pin 008 (P2-05): IOPort
hm2/hm2_7i92.0: IO Pin 009 (P2-06): IOPort
hm2/hm2_7i92.0: IO Pin 010 (P2-07): IOPort
hm2/hm2_7i92.0: IO Pin 011 (P2-08): IOPort
hm2/hm2_7i92.0: IO Pin 012 (P2-09): IOPort
hm2/hm2_7i92.0: IO Pin 013 (P2-10): IOPort
hm2/hm2_7i92.0: IO Pin 014 (P2-11): IOPort
hm2/hm2_7i92.0: IO Pin 015 (P2-12): IOPort
hm2/hm2_7i92.0: IO Pin 016 (P2-13): IOPort
Selecting 3 steppers gives me 4 GPIOs - just perfect !
EDIT: Does not seem to be as easy as expected. Get "Axis at limit" errors, even if there is nothing connected to the pin.
But the configuration is as expected:
halcmd: loadrt hm2_eth board_ip="192.168.1.121" config=" num_encoders=0 num_pwmgens=0 num_stepgens=3"
Note: Using POSIX realtime
hm2_eth: dlopen: /usr/lib/linuxcnc/modules/hm2_eth.so: undefined symbol: hm2_register
<stdin>:1: waitpid failed /usr/bin/rtapi_app hm2_eth
<stdin>:1: /usr/bin/rtapi_app exited without becoming ready
<stdin>:1: insmod for hm2_eth failed, returned -1
halcmd: loadrt hostmot2
Note: Using POSIX realtime
hm2: loading Mesa HostMot2 driver version 0.15
halcmd: loadrt hm2_eth board_ip="192.168.1.121" config=" num_encoders=0 num_pwmgens=0 num_stepgens=3"
hm2_eth: loading Mesa AnyIO HostMot2 ethernet driver version 0.2
hm2_eth: 192.168.1.121: INFO: Hardware address (MAC): 00:60:1b:13:06:39
hm2_eth: discovered 7I92
hm2/hm2_7i92.0: Low Level init 0.15
hm2/hm2_7i92.0: Smart Serial Firmware Version 43
hm2/hm2_7i92.0: 34 I/O Pins used:
hm2/hm2_7i92.0: IO Pin 000 (P2-01): StepGen #0, pin Direction (Output)
hm2/hm2_7i92.0: IO Pin 001 (P2-14): StepGen #0, pin Step (Output)
hm2/hm2_7i92.0: IO Pin 002 (P2-02): StepGen #1, pin Direction (Output)
hm2/hm2_7i92.0: IO Pin 003 (P2-15): StepGen #1, pin Step (Output)
hm2/hm2_7i92.0: IO Pin 004 (P2-03): StepGen #2, pin Direction (Output)
hm2/hm2_7i92.0: IO Pin 005 (P2-16): StepGen #2, pin Step (Output)
hm2/hm2_7i92.0: IO Pin 006 (P2-04): IOPort
hm2/hm2_7i92.0: IO Pin 007 (P2-17): IOPort
hm2/hm2_7i92.0: IO Pin 008 (P2-05): IOPort
hm2/hm2_7i92.0: IO Pin 009 (P2-06): IOPort
hm2/hm2_7i92.0: IO Pin 010 (P2-07): IOPort
hm2/hm2_7i92.0: IO Pin 011 (P2-08): IOPort
hm2/hm2_7i92.0: IO Pin 012 (P2-09): IOPort
hm2/hm2_7i92.0: IO Pin 013 (P2-10): IOPort
hm2/hm2_7i92.0: IO Pin 014 (P2-11): IOPort
hm2/hm2_7i92.0: IO Pin 015 (P2-12): IOPort
hm2/hm2_7i92.0: IO Pin 016 (P2-13): IOPort
Last edit: 08 Oct 2021 21:02 by hwe.
Please Log in or Create an account to join the conversation.
- hwe
- Offline
- Junior Member
-
Less
More
- Posts: 37
- Thank you received: 0
08 Oct 2021 21:18 - 08 Oct 2021 21:32 #222585
by hwe
Replied by hwe on topic 7i92 default firmware version and pncconf
It was working as expected with the custom config for 3 steppers only.
I just had to invert the limits-signal. It needs 0V to detect the limit.
When setting an GPIO to HOME for z-axis it start to run automatically when I do the reference-run.
What I really want is that I can manually to the reference-run, but activate the touch-off signal.
Which signal do I have to select for the GPIO to signal the touch-off ?
EDIT: Found it - it is the External->Sensor !
I just had to invert the limits-signal. It needs 0V to detect the limit.
When setting an GPIO to HOME for z-axis it start to run automatically when I do the reference-run.
What I really want is that I can manually to the reference-run, but activate the touch-off signal.
Which signal do I have to select for the GPIO to signal the touch-off ?
EDIT: Found it - it is the External->Sensor !
Last edit: 08 Oct 2021 21:32 by hwe.
Please Log in or Create an account to join the conversation.
- tommylight
-

- Offline
- Moderator
-
Less
More
- Posts: 21764
- Thank you received: 7438
08 Oct 2021 22:18 #222591
by tommylight
Replied by tommylight on topic 7i92 default firmware version and pncconf
Party for one ? ")
Glad you figured it out.
Glad you figured it out.
Please Log in or Create an account to join the conversation.
Moderators: cmorley
Time to create page: 0.127 seconds