hal: lpt spindle quad encoder with pid
- juergen-home
- Offline
- Senior Member
-

Less
More
- Posts: 44
- Thank you received: 15
28 Dec 2014 23:18 - 28 Dec 2014 23:20 #54336
by juergen-home
hal: lpt spindle quad encoder with pid was created by juergen-home
The basic was generated by stepconf wizard.
The rest was copied from other hal-files and self coded.
The rest was copied from other hal-files and self coded.
Last edit: 28 Dec 2014 23:20 by juergen-home.
Please Log in or Create an account to join the conversation.
- juergen-home
- Offline
- Senior Member
-
Less
More
- Posts: 44
- Thank you received: 15
29 Dec 2014 17:47 - 29 Dec 2014 17:54 #54360
by juergen-home
Replied by juergen-home on topic hal: lpt spindle quad encoder with pid
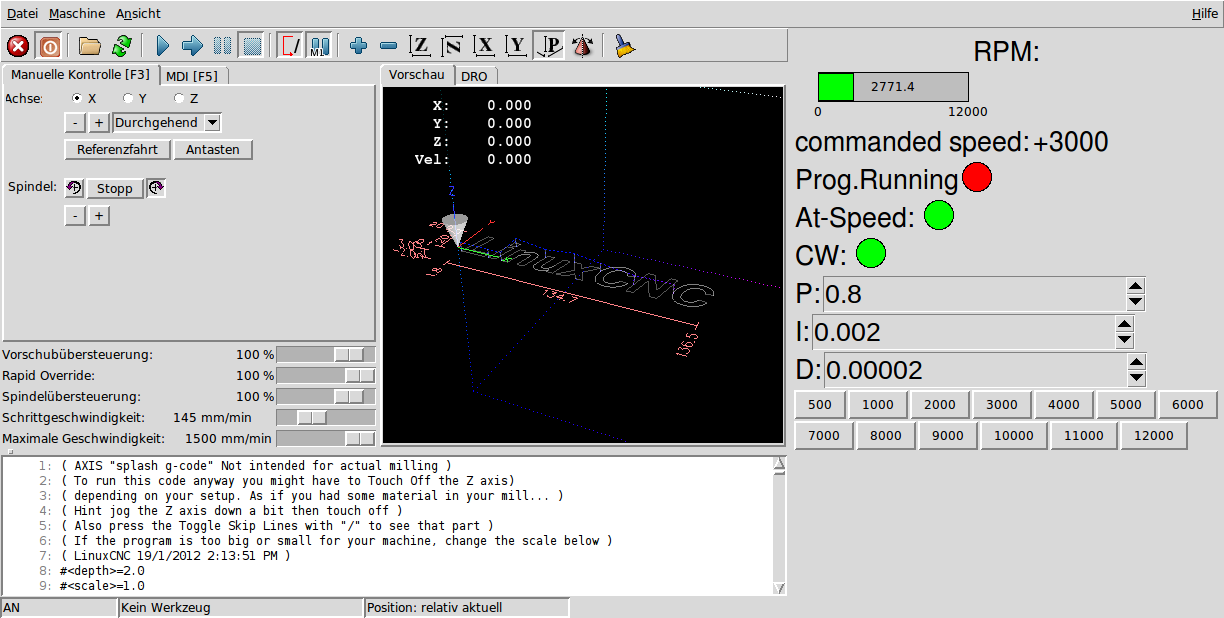
So here some improvement of this draft system.
I use it to test my closed loop spindel configuration.
The hal file and all other config is inside the attaches zip.
connected:

I use it to test my closed loop spindel configuration.
The hal file and all other config is inside the attaches zip.
connected:
Last edit: 29 Dec 2014 17:54 by juergen-home.
The following user(s) said Thank You: danimal300
Please Log in or Create an account to join the conversation.
- danimal300
- Offline
- Senior Member
-
Less
More
- Posts: 54
- Thank you received: 1
08 Jun 2016 01:19 - 08 Jun 2016 14:16 #75664
by danimal300
Replied by danimal300 on topic hal: lpt spindle quad encoder with pid
Thank you for posting this! I have been trying to incorporate this into my machine, and I was wondering if you could walk me through the operation of your PID algorithm.
I am having problems tuning the speed values and my displayed spindle values jump all over the place, even when I have I and D off. are there other I and D values that need to be turned off to be in true proportional mode? I am talking like 500 - 10,000 jumps when set to 200 RPM.
I know that it has been years since you posted this, but any help that you could provide would be greatly appreciated.
Edit: disregard the jumping around issue, I forgot that I changed the low pass filter value to 1 when I was testing. I have it settled back down pretty well now.
I am having problems tuning the speed values and my displayed spindle values jump all over the place, even when I have I and D off. are there other I and D values that need to be turned off to be in true proportional mode? I am talking like 500 - 10,000 jumps when set to 200 RPM.
I know that it has been years since you posted this, but any help that you could provide would be greatly appreciated.
Edit: disregard the jumping around issue, I forgot that I changed the low pass filter value to 1 when I was testing. I have it settled back down pretty well now.
Last edit: 08 Jun 2016 14:16 by danimal300.
Please Log in or Create an account to join the conversation.
- PhilipME
-

- Offline
- Elite Member
-

Less
More
- Posts: 176
- Thank you received: 14
01 Sep 2024 04:59 - 01 Sep 2024 05:01 #309128
by PhilipME
Replied by PhilipME on topic hal: lpt spindle quad encoder with pid
Apology for my simple question
Spindel ein
and
Spindel links
equivalent English
Spindle on
and
Spindle CCW
then on the parport input pins
spindelencoder kanal A
and spindelencoder index
are
spindle phase A
and
spindle index
Is my understanding correct?
Best regards
Philip
Spindel ein
and
Spindel links
equivalent English
Spindle on
and
Spindle CCW
then on the parport input pins
spindelencoder kanal A
and spindelencoder index
are
spindle phase A
and
spindle index
Is my understanding correct?
Best regards
Philip
Last edit: 01 Sep 2024 05:01 by PhilipME.
Please Log in or Create an account to join the conversation.
- juergen-home
- Offline
- Senior Member
-
Less
More
- Posts: 44
- Thank you received: 15
07 Sep 2024 06:46 #309541
by juergen-home
Replied by juergen-home on topic hal: lpt spindle quad encoder with pid
This is correct.
The following user(s) said Thank You: PhilipME
Please Log in or Create an account to join the conversation.
Time to create page: 0.102 seconds