Standalone electronic leadscrew (gearbox) mode for lathe
- ttt
- Offline
- New Member
-

Less
More
- Posts: 11
- Thank you received: 23
21 Jan 2020 01:39 #155289
by ttt
Standalone electronic leadscrew (gearbox) mode for lathe was created by ttt
This is an example of how to configure LinuxCNC to operate as a pure electronic leadscrew (or gearbox) for a lathe, without any CNC function.
Background: While I do some CNC machining with my converted lathe it turns out that in 95% of my uses cases I prefer using my lathe in classic manual mode, especially for quick projects. Until recently I used a custom solution to use my Z-axis stepper and spindle encoder to behave like an electronic leadscrew. While there have been requests to supply examples on how to do this in LinuxCNC I have never seen a working example.
The example consists of a standalone .hal file with a QtVcp based panel and supporting python code and is available here:
github.com/tinic/ElectronicLeadscrew
Hardware used:
- 7i96 Mesa board
- Clone/fake E6B2-CWZ6C Omron encoder
- Two generic DM680T stepper drivers for Z and X axis
- Two Nema 23 stepper to drive Z and X axis
Not sure how interesting this is for anyone here, but I thought I should at least post about it in case someone searches for a solution/hints. Questions are welcome.
Background: While I do some CNC machining with my converted lathe it turns out that in 95% of my uses cases I prefer using my lathe in classic manual mode, especially for quick projects. Until recently I used a custom solution to use my Z-axis stepper and spindle encoder to behave like an electronic leadscrew. While there have been requests to supply examples on how to do this in LinuxCNC I have never seen a working example.
The example consists of a standalone .hal file with a QtVcp based panel and supporting python code and is available here:
github.com/tinic/ElectronicLeadscrew
Hardware used:
- 7i96 Mesa board
- Clone/fake E6B2-CWZ6C Omron encoder
- Two generic DM680T stepper drivers for Z and X axis
- Two Nema 23 stepper to drive Z and X axis
Not sure how interesting this is for anyone here, but I thought I should at least post about it in case someone searches for a solution/hints. Questions are welcome.
The following user(s) said Thank You: Mike_Eitel, joekline9, RGH, tommylight, Boogie, Benb, besriworld, anfänger, J Green and 2 other people also said thanks.
Please Log in or Create an account to join the conversation.
- J Green
- Offline
- Elite Member
-

Less
More
- Posts: 164
- Thank you received: 24
21 Jan 2020 03:01 #155293
by J Green
Replied by J Green on topic Standalone electronic leadscrew (gearbox) mode for lathe
Hi ttt
A very big thank you for sharing all of your efforts an the results.
Cheers
Bob
A very big thank you for sharing all of your efforts an the results.
Cheers
Bob
Please Log in or Create an account to join the conversation.
- michelko
- Offline
- Junior Member
-

Less
More
- Posts: 22
- Thank you received: 0
25 Apr 2023 12:03 #269848
by michelko
Replied by michelko on topic Standalone electronic leadscrew (gearbox) mode for lathe
Hi just found your ELS Project. Exactly what i am looking for unfortunately i use the paralelport instead of an Mesa Card.
Will this work with the parallel Port too?
Thanks Michael
Will this work with the parallel Port too?
Thanks Michael
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-

Less
More
- Posts: 17958
- Thank you received: 5263
25 Apr 2023 12:15 #269850
by PCW
Replied by PCW on topic Standalone electronic leadscrew (gearbox) mode for lathe
It should, You can do almost anything with a simple parallel port system
as you can with fancier hardware, there just will be some limitations
on step rates, PWM rates, and encoder resolution.
as you can with fancier hardware, there just will be some limitations
on step rates, PWM rates, and encoder resolution.
Please Log in or Create an account to join the conversation.
- michelko
- Offline
- Junior Member
-
Less
More
- Posts: 22
- Thank you received: 0
30 Apr 2023 19:09 #270326
by michelko
Replied by michelko on topic Standalone electronic leadscrew (gearbox) mode for lathe
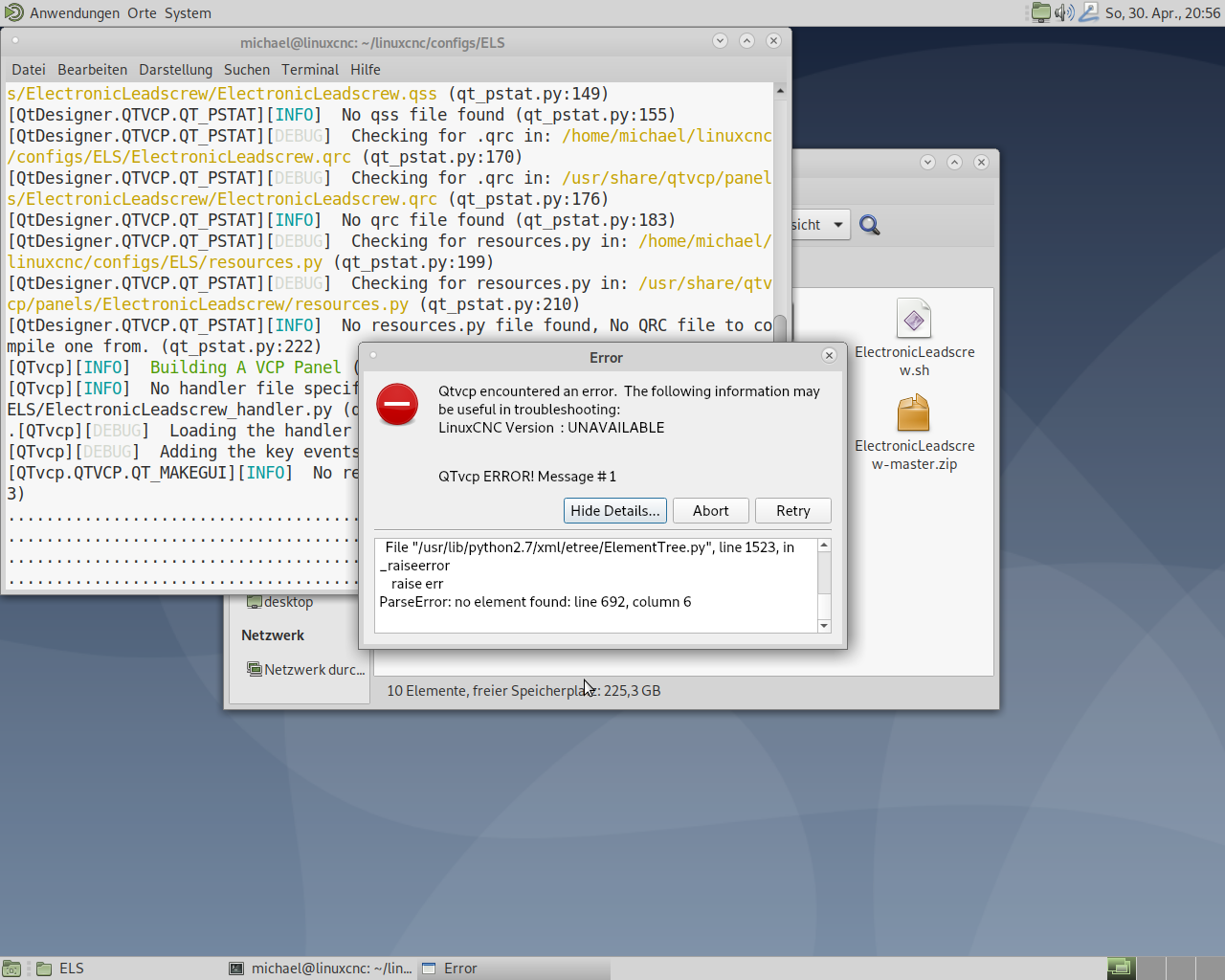
i tried to change to parallel poert but getting some errors on startup.
There is a window with this message:Traceback (most recent call last):File "/usr/bin/qtvcp", line 377, in <module>APP = QTVCP()File "/usr/bin/qtvcp", line 211, in __init__window.instance()File "/usr/lib/python2.7/dist-packages/qtvcp/qt_makegui.py", line 178, in instanceinstance = uic.loadUi(self.filename, self)File "/usr/lib/python2.7/dist-packages/PyQt5/uic/__init__.py", line 226, in loadUireturn DynamicUILoader(package).loadUi(uifile, baseinstance, resource_suffix)File "/usr/lib/python2.7/dist-packages/PyQt5/uic/Loader/loader.py", line 72, in loadUireturn self.parse(filename, resource_suffix, basedir)File "/usr/lib/python2.7/dist-packages/PyQt5/uic/uiparser.py", line 1013, in parsedocument = parse(filename)File "/usr/lib/python2.7/xml/etree/ElementTree.py", line 1182, in parsetree.parse(source, parser)File "/usr/lib/python2.7/xml/etree/ElementTree.py", line 657, in parseself._root = parser.close()File "/usr/lib/python2.7/xml/etree/ElementTree.py", line 1671, in closeself._raiseerror(v)File "/usr/lib/python2.7/xml/etree/ElementTree.py", line 1523, in _raiseerrorraise errParseError: no element found: line 692, column 6
There is a window with this message:Traceback (most recent call last):File "/usr/bin/qtvcp", line 377, in <module>APP = QTVCP()File "/usr/bin/qtvcp", line 211, in __init__window.instance()File "/usr/lib/python2.7/dist-packages/qtvcp/qt_makegui.py", line 178, in instanceinstance = uic.loadUi(self.filename, self)File "/usr/lib/python2.7/dist-packages/PyQt5/uic/__init__.py", line 226, in loadUireturn DynamicUILoader(package).loadUi(uifile, baseinstance, resource_suffix)File "/usr/lib/python2.7/dist-packages/PyQt5/uic/Loader/loader.py", line 72, in loadUireturn self.parse(filename, resource_suffix, basedir)File "/usr/lib/python2.7/dist-packages/PyQt5/uic/uiparser.py", line 1013, in parsedocument = parse(filename)File "/usr/lib/python2.7/xml/etree/ElementTree.py", line 1182, in parsetree.parse(source, parser)File "/usr/lib/python2.7/xml/etree/ElementTree.py", line 657, in parseself._root = parser.close()File "/usr/lib/python2.7/xml/etree/ElementTree.py", line 1671, in closeself._raiseerror(v)File "/usr/lib/python2.7/xml/etree/ElementTree.py", line 1523, in _raiseerrorraise errParseError: no element found: line 692, column 6
Please Log in or Create an account to join the conversation.
- michelko
- Offline
- Junior Member
-
Less
More
- Posts: 22
- Thank you received: 0
30 Apr 2023 19:15 #270328
by michelko
Replied by michelko on topic Standalone electronic leadscrew (gearbox) mode for lathe
iam not good in programming so can someone help out, please?
Here is whats the Terminal is showing:
Cant post the terminal message. Says: to many links in your Message
What am i doing wrong?
Regards
Here is whats the Terminal is showing:
Cant post the terminal message. Says: to many links in your Message
What am i doing wrong?
Regards
Please Log in or Create an account to join the conversation.
- michelko
- Offline
- Junior Member
-
Less
More
- Posts: 22
- Thank you received: 0
30 Apr 2023 19:17 #270329
by michelko
Replied by michelko on topic Standalone electronic leadscrew (gearbox) mode for lathe
Attachments:
Please Log in or Create an account to join the conversation.
- michelko
- Offline
- Junior Member
-
Less
More
- Posts: 22
- Thank you received: 0
16 Oct 2023 09:28 - 16 Oct 2023 09:29 #283112
by michelko
Replied by michelko on topic Standalone electronic leadscrew (gearbox) mode for lathe
Hi,
at leats i got i running with my parallel Port setup.
One problem left:
in the HAL are those sections one for x and one for z
net x-control-type <= lathe_ui.control_x_type
net x-control-type => hm2_7i96.0.stepgen.01.control-type
net x-velocity-cmd <= lathe_ui.velocity_x_cmd
net x-velocity-cmd => hm2_7i96.0.stepgen.01.velocity-cmd
The problemis in the second and the fourth line
I don´t know how to switch this to the parport stepgen commands.
As far as i understand the Hal those are used for jogging with the cursor buttons, but maybe i am wrong.
Any ideas??
Thanks in advance
at leats i got i running with my parallel Port setup.
One problem left:
in the HAL are those sections one for x and one for z
net x-control-type <= lathe_ui.control_x_type
net x-control-type => hm2_7i96.0.stepgen.01.control-type
net x-velocity-cmd <= lathe_ui.velocity_x_cmd
net x-velocity-cmd => hm2_7i96.0.stepgen.01.velocity-cmd
The problemis in the second and the fourth line
I don´t know how to switch this to the parport stepgen commands.
As far as i understand the Hal those are used for jogging with the cursor buttons, but maybe i am wrong.
Any ideas??
Thanks in advance
Last edit: 16 Oct 2023 09:29 by michelko.
Please Log in or Create an account to join the conversation.
- Markyd
- Offline
- Senior Member
-

Less
More
- Posts: 76
- Thank you received: 2
16 Oct 2023 20:02 #283139
by Markyd
Replied by Markyd on topic Standalone electronic leadscrew (gearbox) mode for lathe
Will this work with only one stepper (on the main leadscrew)?
Please Log in or Create an account to join the conversation.
- michelko
- Offline
- Junior Member
-
Less
More
- Posts: 22
- Thank you received: 0
17 Oct 2023 05:15 #283158
by michelko
Replied by michelko on topic Standalone electronic leadscrew (gearbox) mode for lathe
Yes but then the facing and taper function won`t work
Please Log in or Create an account to join the conversation.
Time to create page: 0.215 seconds