various linking signal problems
- dangu85
- Offline
- New Member
-

Less
More
- Posts: 15
- Thank you received: 1
09 Jul 2019 18:03 #138963
by dangu85
Replied by dangu85 on topic various linking signal problems
oh sorry.. that line must be
if GSTAT.stat.flood:
now it's ok
thanks
if GSTAT.stat.flood:
now it's ok
thanks
Please Log in or Create an account to join the conversation.
- dangu85
- Offline
- New Member
-
Less
More
- Posts: 15
- Thank you received: 1
13 Jul 2019 13:10 #139249
by dangu85
Replied by dangu85 on topic various linking signal problems
So, I think I'm near to an end of this... finaly.
I managed to make the combo box work. It was a bit tricky. Following the youtube vid and a configuration example: one should create the combobox first (named combo) and then create a list with 2 columns. One composed of chararray and the other with ints type data. Then create the MDI_Action to call the oword and pass the parameter which takes the name of the combobox with an "-s" appended. Exemple: o<oword> call [${combo-s}]
Now only thing left is the max-velocity slider. I changed the scale to match the ini file but it does not work.
I think that halui.max−velocity.increase/decrease must be used too, but how??
Anyway here how it looks:
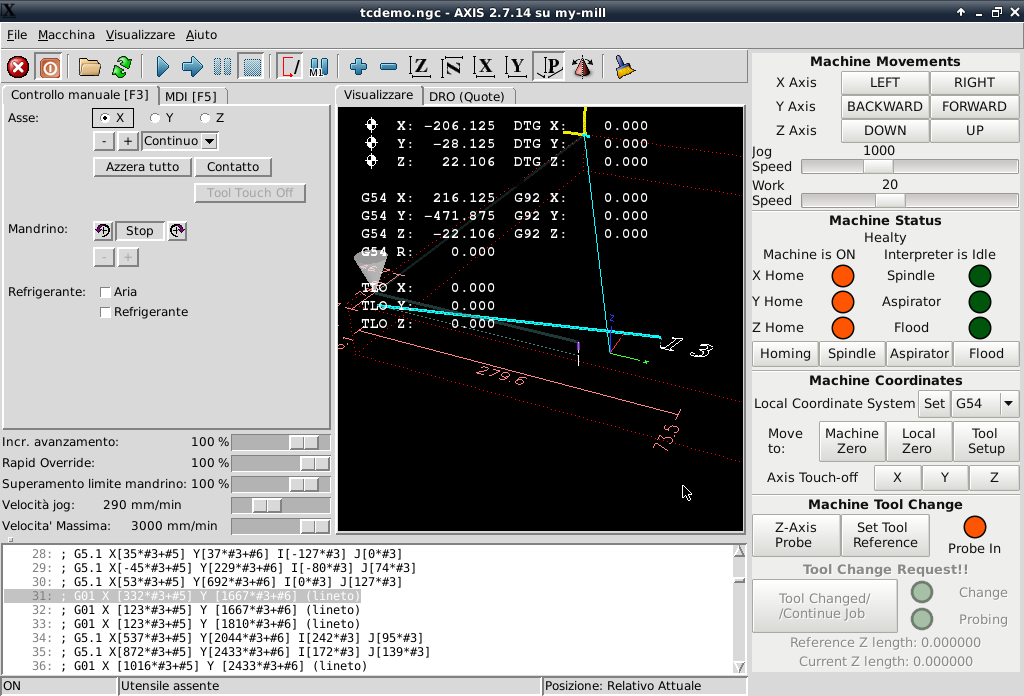
Some ngc routines for tool leght compensation must be checked with real machine. Now I'm simulating it with a bob
The M6 remap is a semplified version of the demo one. The Z-Axis Probe button is a touch-plate routine to zero the Z on the piece. The Set tool Ref button calls a routine which removes any leght compensation and measures to a fixed point the first tool. It is used as reference when an M6 is called. When an M6 is called in a program, the tool change menu activates to do the that task and new tool leght is measured. Then the tool offset is applayed. Tool number is completly ignored except for T0(tool remove)
Files here
Thanks
I managed to make the combo box work. It was a bit tricky. Following the youtube vid and a configuration example: one should create the combobox first (named combo) and then create a list with 2 columns. One composed of chararray and the other with ints type data. Then create the MDI_Action to call the oword and pass the parameter which takes the name of the combobox with an "-s" appended. Exemple: o<oword> call [${combo-s}]
Now only thing left is the max-velocity slider. I changed the scale to match the ini file but it does not work.
I think that halui.max−velocity.increase/decrease must be used too, but how??
Anyway here how it looks:
Some ngc routines for tool leght compensation must be checked with real machine. Now I'm simulating it with a bob
The M6 remap is a semplified version of the demo one. The Z-Axis Probe button is a touch-plate routine to zero the Z on the piece. The Set tool Ref button calls a routine which removes any leght compensation and measures to a fixed point the first tool. It is used as reference when an M6 is called. When an M6 is called in a program, the tool change menu activates to do the that task and new tool leght is measured. Then the tool offset is applayed. Tool number is completly ignored except for T0(tool remove)
Files here
Thanks
Attachments:
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21660
- Thank you received: 7400
13 Jul 2019 13:16 #139252
by tommylight
Replied by tommylight on topic various linking signal problems
Nice, thank you.
Please Log in or Create an account to join the conversation.
- cmorley
- Offline
- Moderator
-
Less
More
- Posts: 7316
- Thank you received: 2147
13 Jul 2019 16:53 #139263
by cmorley
I see nowhere in your postgui file where:
max-velocity.direct-value is set true
max-velocity.scale is set to .01666 (for converting from distance per minute to required distance per second
halui.max-velocity.count-enable is set to true to enable
But since you are using a python handler file - personally I would use python for everything and forget halui
Chris M
Replied by cmorley on topic various linking signal problems
So,
Now only thing left is the max-velocity slider. I changed the scale to match the ini file but it does not work.
I think that halui.max−velocity.increase/decrease must be used too, but how??
I see nowhere in your postgui file where:
max-velocity.direct-value is set true
max-velocity.scale is set to .01666 (for converting from distance per minute to required distance per second
halui.max-velocity.count-enable is set to true to enable
But since you are using a python handler file - personally I would use python for everything and forget halui
Chris M
Please Log in or Create an account to join the conversation.
- dangu85
- Offline
- New Member
-
Less
More
- Posts: 15
- Thank you received: 1
13 Jul 2019 18:15 #139265
by dangu85
Infinitely Thanks!
Added this and now works. The slider data needed to be converted from float to s32 type so it became a bit long
Now it's complete
Thanks so much!
Replied by dangu85 on topic various linking signal problems
I see nowhere in your postgui file where:
max-velocity.direct-value is set true
max-velocity.scale is set to .01666 (for converting from distance per minute to required distance per second
halui.max-velocity.count-enable is set to true to enable
Infinitely Thanks!
Added this and now works. The slider data needed to be converted from float to s32 type so it became a bit long
setp halui.max-velocity.direct-value TRUE
setp halui.max-velocity.count-enable TRUE
net workspeed-scale halui.max-velocity.scale
sets workspeed-scale 0.01666
loadrt conv_float_s32 count=1
addf conv-float-s32.0 servo-thread
net panel-workspeed-float conv-float-s32.0.in gladevcp.work-speed
net panel-workspeed-s32 conv-float-s32.0.out halui.max-velocity.countsDon't have much python programming experience sadlyBut since you are using a python handler file - personally I would use python for everything and forget halui
Now it's complete
Thanks so much!
Please Log in or Create an account to join the conversation.
- cmorley
- Offline
- Moderator
-
Less
More
- Posts: 7316
- Thank you received: 2147
13 Jul 2019 18:40 #139266
by cmorley
Replied by cmorley on topic various linking signal problems
Oh great glad it works for you.
Yes we should add a s32 pin to the sliders so you don't need to convert...
Chris M
Yes we should add a s32 pin to the sliders so you don't need to convert...
Chris M
Please Log in or Create an account to join the conversation.
Moderators: HansU
Time to create page: 0.100 seconds