Updating pncconf for 7i95t
- bigmactx
-
 Topic Author
Topic Author
- Offline
- New Member
-

Less
More
- Posts: 11
- Thank you received: 1
13 Apr 2025 00:13 #326201
by bigmactx
Updating pncconf for 7i95t was created by bigmactx
Sorry so slow but massive interruptions and a few train wrecks to clean up...
I have the 7i95t working completly now and would like to share what I've learned about getting this board to work with linuxcnc 2.10pre. MesaCT tool 2.1.7 doesn't currently support the 7i95t and neither does pncconf as compilied with 2.10pre however using the information in the file Under ADDING_A_MESA_CARD.md along with lots of searching and some trial and error I managed to create a good working entry for the private_data.py file. Pnccconf can now use this information to create a working configuration. I've attached this information in "pncconf for 7i95t".
I didn't include the P1 expansion connector as the 7i95t has sufficient resources for all my needs. It would be very easy to add however if you need it.
Now when you run pncconf you can select the 7i95t and properly configure it as required however the ~/linuxcnc/configs/<config name>.hal file needs a minor tweak before linuxcnc can use it. It seems pncconf translates inmux to inm and that needs to be fixed (thanks to user merongi on the forum). To do this I simply created a one line script since this must be fixed everytime you run pncconf. Basicly you need:
sed -i 's/inm.00/inmux.00/g' ~/linuxcnc/configs/<config name>/<config name>.hal
Now you can run linuxcnc.
I also wanted to add a joystick for X & Y axis that will provide the same function as the Up/Down. Left/Right arrow keys of the keyboard. While HAL overall and creating the necessary entries is well documented finding the right inputs took me a lot of study/trial and error with halshow to find the right signals. First assign inputs to each switch using the drop down selection Axis Rapid -> Jog xx in pncconf as appropriate. Pncconf will create the necessary entry in your <config name>.hal. To connect these inputs you need to map them appropriately. Here's the custom.hal contents I created to accomplish this (this implies X is joint 0 and Y is 1):
setp halui.joint.jog-speed 6500
net jog-x-neg => halui.joint.0.minus
net jog-x-pos => halui.joint.0.plus
net jog-y-neg => halui.joint.1.minus
net jog-y-pos => halui.joint.1.plus
The last item I spent time on was getting clarity on proper setup to eliminate Following Errors. Following some comments from andypugh and PCW I was able to clean this up. Here's a quick recap of the knowlege shared:
base period max velocity > stepgen max velocity > machine max velocity
Each step requires headroom (say 5-25% each)
My interpertation is in the Screen section of pncconf you set Min linear velocity and Max linear velocity. They become in the <config name>.ini file:
[TRAJ]
...
DEFAULT_LINEAR_VELOCITY = xx
MAX_LINEAR_VELOCITY = xx which is machine max velocity in the equation above
Under each Axis you set Max Velocity which becomes MAX_VELOCITY in the <config name>.ini file. STEPGEN_MAXVEL is automatically calculated by pncconf at 125% of the MAX_VELOCITY (which is required also).
If I'm correct, the base period max velocity can be computed by ACTUAL SERVO PERIOD / highest STEPGEN_MAXVEL used by any motor. You need to allow head room here so I multiply it by 0.75.
Now you have all three components which allows you to avoid following errors, or at least it works for me. While not clearly stated, the max jitter value could also be a factor. If it's excessively high you will likely need more than 25% headroom.
Comments and corrections always welcome.
Mike
I have the 7i95t working completly now and would like to share what I've learned about getting this board to work with linuxcnc 2.10pre. MesaCT tool 2.1.7 doesn't currently support the 7i95t and neither does pncconf as compilied with 2.10pre however using the information in the file Under ADDING_A_MESA_CARD.md along with lots of searching and some trial and error I managed to create a good working entry for the private_data.py file. Pnccconf can now use this information to create a working configuration. I've attached this information in "pncconf for 7i95t".
I didn't include the P1 expansion connector as the 7i95t has sufficient resources for all my needs. It would be very easy to add however if you need it.
Now when you run pncconf you can select the 7i95t and properly configure it as required however the ~/linuxcnc/configs/<config name>.hal file needs a minor tweak before linuxcnc can use it. It seems pncconf translates inmux to inm and that needs to be fixed (thanks to user merongi on the forum). To do this I simply created a one line script since this must be fixed everytime you run pncconf. Basicly you need:
sed -i 's/inm.00/inmux.00/g' ~/linuxcnc/configs/<config name>/<config name>.hal
Now you can run linuxcnc.
I also wanted to add a joystick for X & Y axis that will provide the same function as the Up/Down. Left/Right arrow keys of the keyboard. While HAL overall and creating the necessary entries is well documented finding the right inputs took me a lot of study/trial and error with halshow to find the right signals. First assign inputs to each switch using the drop down selection Axis Rapid -> Jog xx in pncconf as appropriate. Pncconf will create the necessary entry in your <config name>.hal. To connect these inputs you need to map them appropriately. Here's the custom.hal contents I created to accomplish this (this implies X is joint 0 and Y is 1):
setp halui.joint.jog-speed 6500
net jog-x-neg => halui.joint.0.minus
net jog-x-pos => halui.joint.0.plus
net jog-y-neg => halui.joint.1.minus
net jog-y-pos => halui.joint.1.plus
The last item I spent time on was getting clarity on proper setup to eliminate Following Errors. Following some comments from andypugh and PCW I was able to clean this up. Here's a quick recap of the knowlege shared:
base period max velocity > stepgen max velocity > machine max velocity
Each step requires headroom (say 5-25% each)
My interpertation is in the Screen section of pncconf you set Min linear velocity and Max linear velocity. They become in the <config name>.ini file:
[TRAJ]
...
DEFAULT_LINEAR_VELOCITY = xx
MAX_LINEAR_VELOCITY = xx which is machine max velocity in the equation above
Under each Axis you set Max Velocity which becomes MAX_VELOCITY in the <config name>.ini file. STEPGEN_MAXVEL is automatically calculated by pncconf at 125% of the MAX_VELOCITY (which is required also).
If I'm correct, the base period max velocity can be computed by ACTUAL SERVO PERIOD / highest STEPGEN_MAXVEL used by any motor. You need to allow head room here so I multiply it by 0.75.
Now you have all three components which allows you to avoid following errors, or at least it works for me. While not clearly stated, the max jitter value could also be a factor. If it's excessively high you will likely need more than 25% headroom.
Comments and corrections always welcome.
Mike
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-

Less
More
- Posts: 17988
- Thank you received: 5280
13 Apr 2025 00:34 #326203
by PCW
Replied by PCW on topic Updating pncconf for 7i95t
A couple of comments
There is no base period.
The maximum velocity is not dependent on the servo thread period.
You should get no latency dependent following errors unless"
1. The latency is so bad that a whole servo cycle is skipped
2. The DPLL does not have enough headroom to account for
linux's baseline timing drift (fix by setting the timer to a larger
negative number say -200)
There is no base period.
The maximum velocity is not dependent on the servo thread period.
You should get no latency dependent following errors unless"
1. The latency is so bad that a whole servo cycle is skipped
2. The DPLL does not have enough headroom to account for
linux's baseline timing drift (fix by setting the timer to a larger
negative number say -200)
Please Log in or Create an account to join the conversation.
- alexandrap
- Offline
- Junior Member
-

Less
More
- Posts: 22
- Thank you received: 2
28 Apr 2025 11:10 #327210
by alexandrap
Replied by alexandrap on topic Updating pncconf for 7i95t
bigmactx
I also have a 7i95T card and I have a problem with the configuration. I don't understand your procedure at all...
Please write the most detailed procedure for activating the script and attach the script - I would like to use pnconfig on linuxcnc 2.94.
Thank you
I also have a 7i95T card and I have a problem with the configuration. I don't understand your procedure at all...
Please write the most detailed procedure for activating the script and attach the script - I would like to use pnconfig on linuxcnc 2.94.
Thank you
Please Log in or Create an account to join the conversation.
- JT
-

- Away
- Administrator
-

Less
More
- Posts: 1093
- Thank you received: 582
30 Apr 2025 10:19 #327334
by JT
JT
Replied by JT on topic Updating pncconf for 7i95t
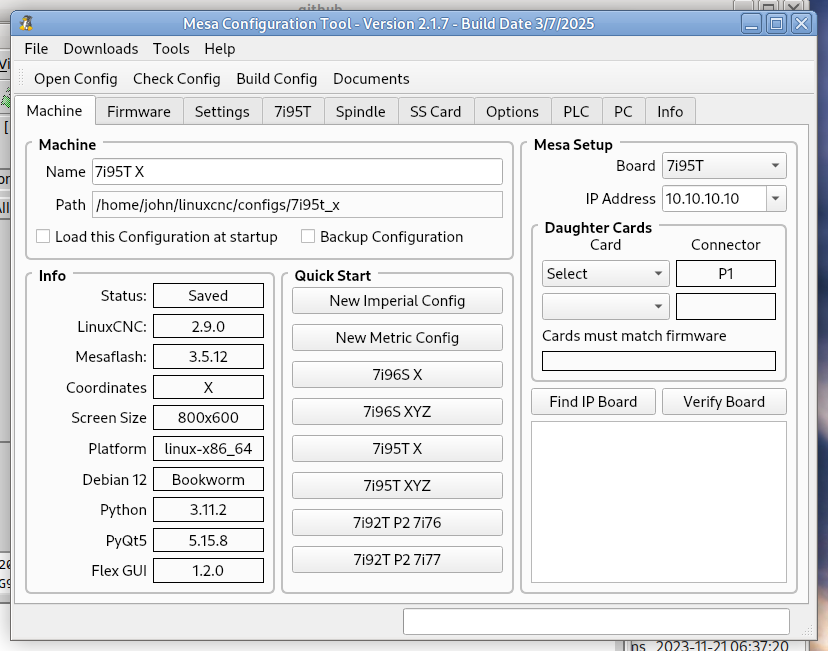
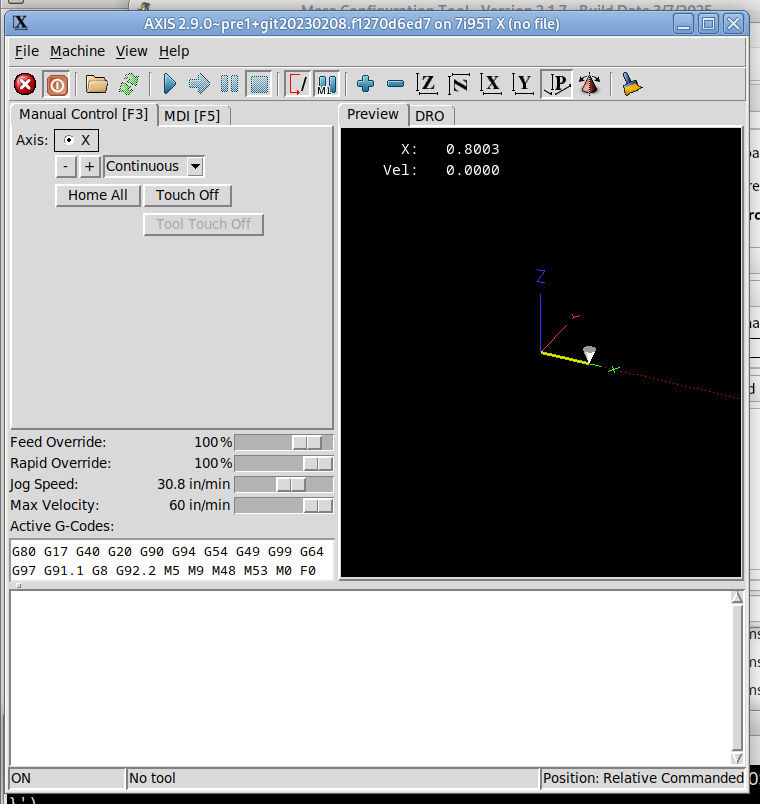
I just ran MesaCT 2.1.7 and pressed two buttons and created a working configuration for a 7i95T.Sorry so slow but massive interruptions and a few train wrecks to clean up...
I have the 7i95t working completly now and would like to share what I've learned about getting this board to work with linuxcnc 2.10pre. MesaCT tool 2.1.7 doesn't currently support the 7i95t
JT
Attachments:
Please Log in or Create an account to join the conversation.
- alexandrap
- Offline
- Junior Member
-
Less
More
- Posts: 22
- Thank you received: 2
30 Apr 2025 13:16 #327338
by alexandrap
Replied by alexandrap on topic Updating pncconf for 7i95t
Yes, excellent tool , but I can't create a spindle configuration with a servo motor drive (step-dir chinese servo T3D) using CT2 - I was hoping that pnconfig knew that.
I'm afraid I don't have enough knowledge to manually insert component lines into an already created configuration file (CT2).
I'm afraid I don't have enough knowledge to manually insert component lines into an already created configuration file (CT2).
Please Log in or Create an account to join the conversation.
- alexandrap
- Offline
- Junior Member
-
Less
More
- Posts: 22
- Thank you received: 2
03 Jun 2025 11:43 #329594
by alexandrap
Replied by alexandrap on topic Updating pncconf for 7i95t
Can't find anyone who can " translate" the procedure mentioned by the author into " human" language?
is this a script?:
sed -i 's/inm.00/inmux.00/g' ~/linuxcnc/configs/<config name>/<config name>.hal
Where should I put " pncconffor7i95T.txt" ?
what is meant <config name>/<config name>.hal
how do I run the script ?
is this a script?:
sed -i 's/inm.00/inmux.00/g' ~/linuxcnc/configs/<config name>/<config name>.hal
Where should I put " pncconffor7i95T.txt" ?
what is meant <config name>/<config name>.hal
how do I run the script ?
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17988
- Thank you received: 5280
03 Jun 2025 14:10 #329606
by PCW
Replied by PCW on topic Updating pncconf for 7i95t
Its probably easier to add the step/dir spindle to a MesaCT created configuration.
Can you post your MesaCT created hal/ini/io files?
No more than handful of lines need to be added.
Can you post your MesaCT created hal/ini/io files?
No more than handful of lines need to be added.
Please Log in or Create an account to join the conversation.
- alexandrap
- Offline
- Junior Member
-
Less
More
- Posts: 22
- Thank you received: 2
03 Jun 2025 17:16 - 03 Jun 2025 17:18 #329619
by alexandrap
Replied by alexandrap on topic Updating pncconf for 7i95t
I don't have a Mesa CT2 file created yet - I'm still hoping to find a "pure" way to create it via pnconfig in one step - without inserting lines.
I have a small lathe that I would like to use in 3 configurations - as a lathe, as a milling machine (I have a milling attachment for the lathe) and as a rotary table, when the additional spindle (which will be classically driven via an inverter) will be on the support.
my machine:
www.youtube.com/channel/UC_zOVvs96VKX6R_DIO5KyJg
I have a small lathe that I would like to use in 3 configurations - as a lathe, as a milling machine (I have a milling attachment for the lathe) and as a rotary table, when the additional spindle (which will be classically driven via an inverter) will be on the support.
my machine:
www.youtube.com/channel/UC_zOVvs96VKX6R_DIO5KyJg
Last edit: 03 Jun 2025 17:18 by alexandrap.
Please Log in or Create an account to join the conversation.
- alexandrap
- Offline
- Junior Member
-
Less
More
- Posts: 22
- Thank you received: 2
04 Jun 2025 12:55 - 04 Jun 2025 12:56 #329684
by alexandrap
Replied by alexandrap on topic Updating pncconf for 7i95t
I resigned.
Can you tell me what lines you would put in the fictitious .hal and .ini files to make the step-dir spindle work?
for lathe config XZ(C?)
Or a link to an example.
thanks
Can you tell me what lines you would put in the fictitious .hal and .ini files to make the step-dir spindle work?
for lathe config XZ(C?)
Or a link to an example.
thanks
Last edit: 04 Jun 2025 12:56 by alexandrap.
Please Log in or Create an account to join the conversation.
- PCW
-
- Away
- Moderator
-
Less
More
- Posts: 17988
- Thank you received: 5280
04 Jun 2025 13:57 #329686
by PCW
Replied by PCW on topic Updating pncconf for 7i95t
It would be easier with a starting hal/ini file set because
while the Mesa and LinuxCNC pin names are known,
the specific signal names used are configuration dependent.
(signal names are arbitrary and everyone uses different ones)
while the Mesa and LinuxCNC pin names are known,
the specific signal names used are configuration dependent.
(signal names are arbitrary and everyone uses different ones)
Please Log in or Create an account to join the conversation.
Moderators: cmorley
Time to create page: 0.210 seconds