- Configuring LinuxCNC
- Advanced Configuration
- EtherCAT
- What do i need exactly for ethercat ? Recommended hardware??
What do i need exactly for ethercat ? Recommended hardware??
- smc.collins
- Offline
- Platinum Member
-

Less
More
- Posts: 723
- Thank you received: 139
16 Dec 2023 01:31 #288279
by smc.collins
What do i need exactly for ethercat ? Recommended hardware?? was created by smc.collins
I'm considering going ether at on my next build, is there a ethercat for dummys that would be helpful??
Please Log in or Create an account to join the conversation.
- rodw
-

- Offline
- Platinum Member
-
Less
More
- Posts: 11949
- Thank you received: 4068
16 Dec 2023 02:49 #288282
by rodw
Replied by rodw on topic What do i need exactly for ethercat ? Recommended hardware??
Installing the software is now super simple as the ethercat master and the linuxcnc ethercat driver are available on a repository.
We have included this repo already set up on the 2.9.1 ISO. The 2.9.2/2.9.1a ISO which will be released soon, will improve this a bit. (Mainly removing my repo for the hal driver as it is now hosted by the ethercat guys.
So basically install 2.9.1, do a sudo apt update and follow the Ethercat Sticky I wrote.
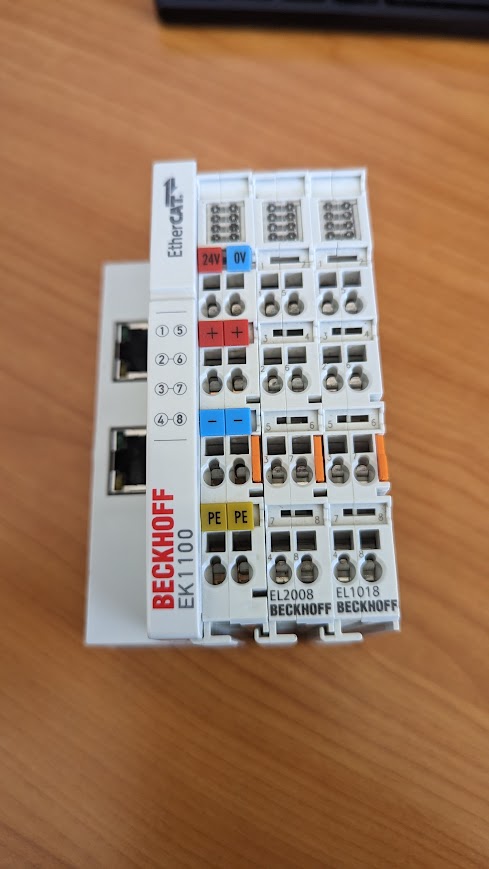
The simplest way would be to use the fully supported Beckhoff modules and a 24 volt power supply
EK1100 and the clipon modules EL200X inputs, EL101X outputs, EL5151 encoder input
There are some Chinese IO board from Rtelligent (has PWM etc) and Deiwu (basic I/O only) which we have configs for in my Github. (should be linked to in the sticky) github.com/rodw-au/linuxcnc-cia402. Its been hard to find an alternative to encoder interfaces other than Beckhoff. This one should be OK www.icpdas.com/en/product/ECAT-2092T and there is one Chiniese I/O board with an encoder input if you are brave.
For drives, it does not matter much but I would strongly suggest using CIA402 compatible drives that have good documentation available. There is a component by Dominc for these drives. github.com/dbraun1981/hal-cia402 (which I use)
For an entry level solution you could look at Rtelligent closed loop steppers ECT60 (Nema 23/24) or ECT86 (Nema 34) I have both and have used the ECT86 on my mill with a 60v AC toroid.
But for a super clean solution, consider using 220V AC CIA402 servos so you don't need an extra power supply. Rtelligent has some but there are others. User ChapEng has a cheaper one he got moving he will use on a 4th axis so it will just needs mains power and a ethernet cable.
Finally because you understand C, you could look at writing a custom CIA402 homing component that would allow internal homing with prox sensors attached to the drives. linuxcnc.org/docs/stable/html/man/man9/homecomp.9.html That would be a valuable contribution.
We have included this repo already set up on the 2.9.1 ISO. The 2.9.2/2.9.1a ISO which will be released soon, will improve this a bit. (Mainly removing my repo for the hal driver as it is now hosted by the ethercat guys.
So basically install 2.9.1, do a sudo apt update and follow the Ethercat Sticky I wrote.
The simplest way would be to use the fully supported Beckhoff modules and a 24 volt power supply
EK1100 and the clipon modules EL200X inputs, EL101X outputs, EL5151 encoder input
There are some Chinese IO board from Rtelligent (has PWM etc) and Deiwu (basic I/O only) which we have configs for in my Github. (should be linked to in the sticky) github.com/rodw-au/linuxcnc-cia402. Its been hard to find an alternative to encoder interfaces other than Beckhoff. This one should be OK www.icpdas.com/en/product/ECAT-2092T and there is one Chiniese I/O board with an encoder input if you are brave.
For drives, it does not matter much but I would strongly suggest using CIA402 compatible drives that have good documentation available. There is a component by Dominc for these drives. github.com/dbraun1981/hal-cia402 (which I use)
For an entry level solution you could look at Rtelligent closed loop steppers ECT60 (Nema 23/24) or ECT86 (Nema 34) I have both and have used the ECT86 on my mill with a 60v AC toroid.
But for a super clean solution, consider using 220V AC CIA402 servos so you don't need an extra power supply. Rtelligent has some but there are others. User ChapEng has a cheaper one he got moving he will use on a 4th axis so it will just needs mains power and a ethernet cable.
Finally because you understand C, you could look at writing a custom CIA402 homing component that would allow internal homing with prox sensors attached to the drives. linuxcnc.org/docs/stable/html/man/man9/homecomp.9.html That would be a valuable contribution.
Attachments:
The following user(s) said Thank You: PKM, micro_marco, tommylight, blazini36, spumco, tiagounderground, smc.collins
Please Log in or Create an account to join the conversation.
- smc.collins
- Offline
- Platinum Member
-
Less
More
- Posts: 723
- Thank you received: 139
16 Dec 2023 17:58 #288353
by smc.collins
Replied by smc.collins on topic What do i need exactly for ethercat ? Recommended hardware??
I'll check drive specifics, I'm looking at 3.8kw, big machine
Please Log in or Create an account to join the conversation.
- GuiHue
-
- Offline
- Premium Member
-

Less
More
- Posts: 111
- Thank you received: 39
03 Jan 2024 07:55 - 03 Jan 2024 07:57 #289641
by GuiHue
Replied by GuiHue on topic What do i need exactly for ethercat ? Recommended hardware??
For drives: The delta ASDA A2 and A3 series drives come in pretty much any size and can be either made to work using the generic driver or the included driver (for A2, A3 requires a tiny modification to the deviceID). If memory serves right, A3 is cia402 compatible (cant check right now).
Big advantage of the Delta drivers over all the other junk: Proper software, proper documentation, proper ability to tune them.
Edit:
Regarding encoders. Beckhoffs 5101s are stupid expensive. I have now successfully tested using the Delta drives extenc input and accordingly connect my encoders to the respective controller (while still closing the loop within linuxcnc)
Big advantage of the Delta drivers over all the other junk: Proper software, proper documentation, proper ability to tune them.
Edit:
Regarding encoders. Beckhoffs 5101s are stupid expensive. I have now successfully tested using the Delta drives extenc input and accordingly connect my encoders to the respective controller (while still closing the loop within linuxcnc)
Last edit: 03 Jan 2024 07:57 by GuiHue. Reason: added further info
Please Log in or Create an account to join the conversation.
- bob8020
-

- Visitor
-

27 Jan 2024 22:29 #291771
by bob8020
Replied by bob8020 on topic What do i need exactly for ethercat ? Recommended hardware??
Wow, super excellent sticky from Ron, in under an hour installed 2.9.2, wired up Beckhoff EK1100 and a couple EL1018 inputs, typed:
ethercat slaves -v
and presto, lots of valid stuff about the modules. Hooray, no TwinCAT or WIndows needed so far...
My last LinuxCNC install was 2016/2017 with Mesa and that mill is still working 100% perfect, but I've likely forgotten lots about hal and ini and need to learn a LOT more about EtherCAT.
I have a Leadshine CS3E-D1008 closed loop EtherCAT stepper on the way from Damen.cnc, so might luck out and find that Ron's example CIA402 will work") if not I think I saw another user have success with D1008 in LinuxCNC.
if not I think I saw another user have success with D1008 in LinuxCNC.
In the meantime, I dug through /usr/share/examples/sample-configs and haven't seen any EtherCAT references. Maybe the EtherCAT interface code magically creates HAL pins all by itself from the magic XML file? If so that would be great.
So right now I have the Beckhoff "fully supported" modules alive but of course it is in pre-op state as no driver is talking to it.
Is there an example of say a generic Axis hal & ini with a few HAL pins from the Beckhoff input so I could poke in a +24v wire and see a HAL pin change state? In the past once that worked everything just fell into place and it was hal & ini & py gui and off to the races.
But right now I am very very lost with a zillion doc tabs open and no idea how to make the EtherCAT pin appear in Axis...
Anyone know of a trivial hal & ini that just has a few pins to read/write Beckhoff fieldbus pins?
Thanks *very* much.
ethercat slaves -v
and presto, lots of valid stuff about the modules. Hooray, no TwinCAT or WIndows needed so far...
My last LinuxCNC install was 2016/2017 with Mesa and that mill is still working 100% perfect, but I've likely forgotten lots about hal and ini and need to learn a LOT more about EtherCAT.
I have a Leadshine CS3E-D1008 closed loop EtherCAT stepper on the way from Damen.cnc, so might luck out and find that Ron's example CIA402 will work
if not I think I saw another user have success with D1008 in LinuxCNC.In the meantime, I dug through /usr/share/examples/sample-configs and haven't seen any EtherCAT references. Maybe the EtherCAT interface code magically creates HAL pins all by itself from the magic XML file? If so that would be great.
So right now I have the Beckhoff "fully supported" modules alive but of course it is in pre-op state as no driver is talking to it.
Is there an example of say a generic Axis hal & ini with a few HAL pins from the Beckhoff input so I could poke in a +24v wire and see a HAL pin change state? In the past once that worked everything just fell into place and it was hal & ini & py gui and off to the races.
But right now I am very very lost with a zillion doc tabs open and no idea how to make the EtherCAT pin appear in Axis...
Anyone know of a trivial hal & ini that just has a few pins to read/write Beckhoff fieldbus pins?
Thanks *very* much.
Please Log in or Create an account to join the conversation.
- bob8020
-
- Visitor
-
28 Jan 2024 01:01 #291778
by bob8020
Replied by bob8020 on topic What do i need exactly for ethercat ? Recommended hardware??
Well I need to apologize. I did the usual Very Bad Thing which is to keep editing ini and hal until something works. Of course I have pretty much no idea what I am doing, but starting with the Axis simulator, and adding a few loadrt lcec and addf lcec lines and then fixing the assorted errors when starting, after a while it actually started and the green "is it working" light on the Beckhoff EK1100 went from preop blinking to running solid green, and a whole bunch of lovely pins showed up in halshow.
I think it is a real testament to the many developers especially lcec that is actually is possible for an 99.8% ignorant person to get EtherCAT to do anything with no TwinCAT and no Windows.
I think it is a real testament to the many developers especially lcec that is actually is possible for an 99.8% ignorant person to get EtherCAT to do anything with no TwinCAT and no Windows.
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21630
- Thank you received: 7384
28 Jan 2024 08:29 #291789
by tommylight
Replied by tommylight on topic What do i need exactly for ethercat ? Recommended hardware??
@bob8020
Do not change subject tittle, makes it impossible to find when searching.
Thank you.
Do not change subject tittle, makes it impossible to find when searching.
Thank you.
Please Log in or Create an account to join the conversation.
- smc.collins
- Offline
- Platinum Member
-
Less
More
- Posts: 723
- Thank you received: 139
28 Jan 2024 15:59 #291813
by smc.collins
Replied by smc.collins on topic What do i need exactly for ethercat ? Recommended hardware??
make a video, put it on youtube or rumble, my next machine build is going ethercat
Please Log in or Create an account to join the conversation.
- endian
-

- Away
- Platinum Member
-
Less
More
- Posts: 333
- Thank you received: 131
28 Jan 2024 19:46 #291821
by endian
Replied by endian on topic What do i need exactly for ethercat ? Recommended hardware??
hello,
i do not what kind of hardware do you think, but from my point of view is really nice hardware stuff from producer called delta ... they have a great servo packs with great prices... then also they have kopplers and IO cards which should be used here... also have pulsetrain interface (pulse/dir) which is really like mesa card... beckhoff ethercat hardware is great, but price and avaibility was poor few years ago...
I am personally working with old kollmorgen stuff and newer pilz which I bought at scrapeyard... great stuff but there is no support and no documentation avaible... delta has all stuff avaible and all software free...
For PC it is very easy... you defenetely need Intel network chipset... main stream (beckhoff too) using just intel chipset because they have predeterminated RT, DC etc on board... lets check ethercat network drivers and then check chipset on you hardware if it is compatible... but nowdays there are some play because of generic driver makes things easier...
if you what hear something more precise, let us know...
regards
i do not what kind of hardware do you think, but from my point of view is really nice hardware stuff from producer called delta ... they have a great servo packs with great prices... then also they have kopplers and IO cards which should be used here... also have pulsetrain interface (pulse/dir) which is really like mesa card... beckhoff ethercat hardware is great, but price and avaibility was poor few years ago...
I am personally working with old kollmorgen stuff and newer pilz which I bought at scrapeyard... great stuff but there is no support and no documentation avaible... delta has all stuff avaible and all software free...
For PC it is very easy... you defenetely need Intel network chipset... main stream (beckhoff too) using just intel chipset because they have predeterminated RT, DC etc on board... lets check ethercat network drivers and then check chipset on you hardware if it is compatible... but nowdays there are some play because of generic driver makes things easier...
if you what hear something more precise, let us know...
regards
Please Log in or Create an account to join the conversation.
- bob8020
-
- Visitor
-
29 Jan 2024 04:39 #291868
by bob8020
Replied by bob8020 on topic What do i need exactly for ethercat ? Recommended hardware??
Glad the Delta drives are working well for you, that's a good data point as their manuals and software seem good (like Beckhoff).
Has anyone tried a gantry where a pair of servos are needed to move one axis, I have read manuals for three mfg. so far and they all suggest an 'automatic' method where the drive software moves the motor to figure out the inertia and resonance...
For a dual motor gantry I think they would need some sort of coordinated scheme where (somehow) both motors move in sync. In no manual have I found anything like that at all. Yes there are the two axis and three axis controllers but I've not seen dual motor on one axis mentioned. Maybe there is some trick for tuning one motor at a time.
Has anyone tried a gantry where a pair of servos are needed to move one axis, I have read manuals for three mfg. so far and they all suggest an 'automatic' method where the drive software moves the motor to figure out the inertia and resonance...
For a dual motor gantry I think they would need some sort of coordinated scheme where (somehow) both motors move in sync. In no manual have I found anything like that at all. Yes there are the two axis and three axis controllers but I've not seen dual motor on one axis mentioned. Maybe there is some trick for tuning one motor at a time.
Please Log in or Create an account to join the conversation.
- Configuring LinuxCNC
- Advanced Configuration
- EtherCAT
- What do i need exactly for ethercat ? Recommended hardware??
Time to create page: 0.455 seconds