Category: Advanced Configuration
Hi all
I was looking for a way to control my vacuum table's vacuum pump from within axis. After reading the manual, searching linuxcnc's forums, I realised others were probably struggling with similar tasks (myst, dust extraction, ...), too. I could not find a proof cooked recipe. Below, you'll find what I am ready to go with. It is a proof of concept at the time. However, and since I use same/similar components the same/similar way in home automation, I am positive, it works in the real harsh world. Teaser wanted?
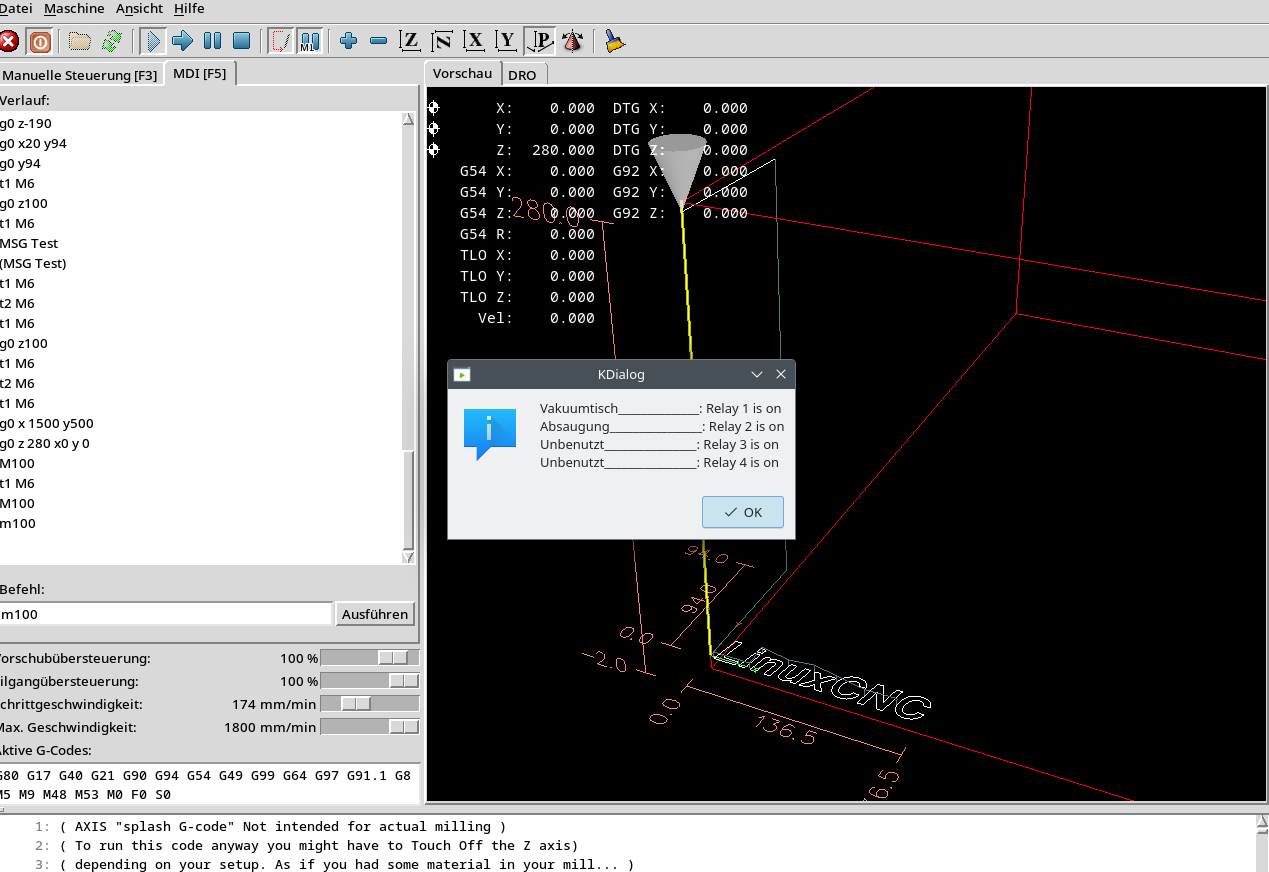
The KDialog message box is being called by M100, this reads the relays statii and displays as shown
So: let's go, just a remark: the editor seems to be disfunct, so I use my own marking:
Ingredients:
=====================================================
*
github.com/ondrej1024/crelay
* a crelay compatible USB relay controller card, I used this one:
* some time
Setting stuff up:
=====================================================
* follow the installation intructions of ondrej, should you fail (like me) at the first step (git clone git://github.com/signal11/hidapi.git), do this instead:
git clone
github.com/signal11/hidapi.git
* If you'd like to have access to your relays over LAN. you can set it up as follows:cat /etc/crelay.conf which crelay
/usr/local/bin/crelay
sudo echo "user ALL=(ALL) NOPASSWD:/path/to/other/comands, /usr/local/bin/crelay" > user
Replace "user" with the very username you run linuxcnc, check itcrelay 1
crelay 1 is on
That was a success, now get familiar with crelay:crelay -i
Detected relay cards:
#
#1 Conrad USB 4-channel relay card (serial 00633CF4)
crelay 1 on
crelay 1
crelay 1 is on
I guess there is no comment needed, ondrej's work is just perfect, isn't it?
So we can set relays from command line, as user "user" (cnc in my case) and read their status. Howto do it from within g-code?
M1xx comes handy:
=====================================================
Place a script similar to attached M100 into the directory specified in the .ini file's [DISPLAY] section under PROGRAM_PREFIX = /home/cnc/linuxcnc/configs/cnc0/macros
My path above needs to be changed to your definition.
Maybe, there is some rebooting and logging in/out/in required. I did not make notes on this.
Things to consider:
=====================================================
This approach is not for real time requiring tasks. However, I think, for these tasks:
* clamping stock via vacuum
* starting dust extraction
* and mybe even myst
real time is not required
Hope that helps someone else, too
greez
chris