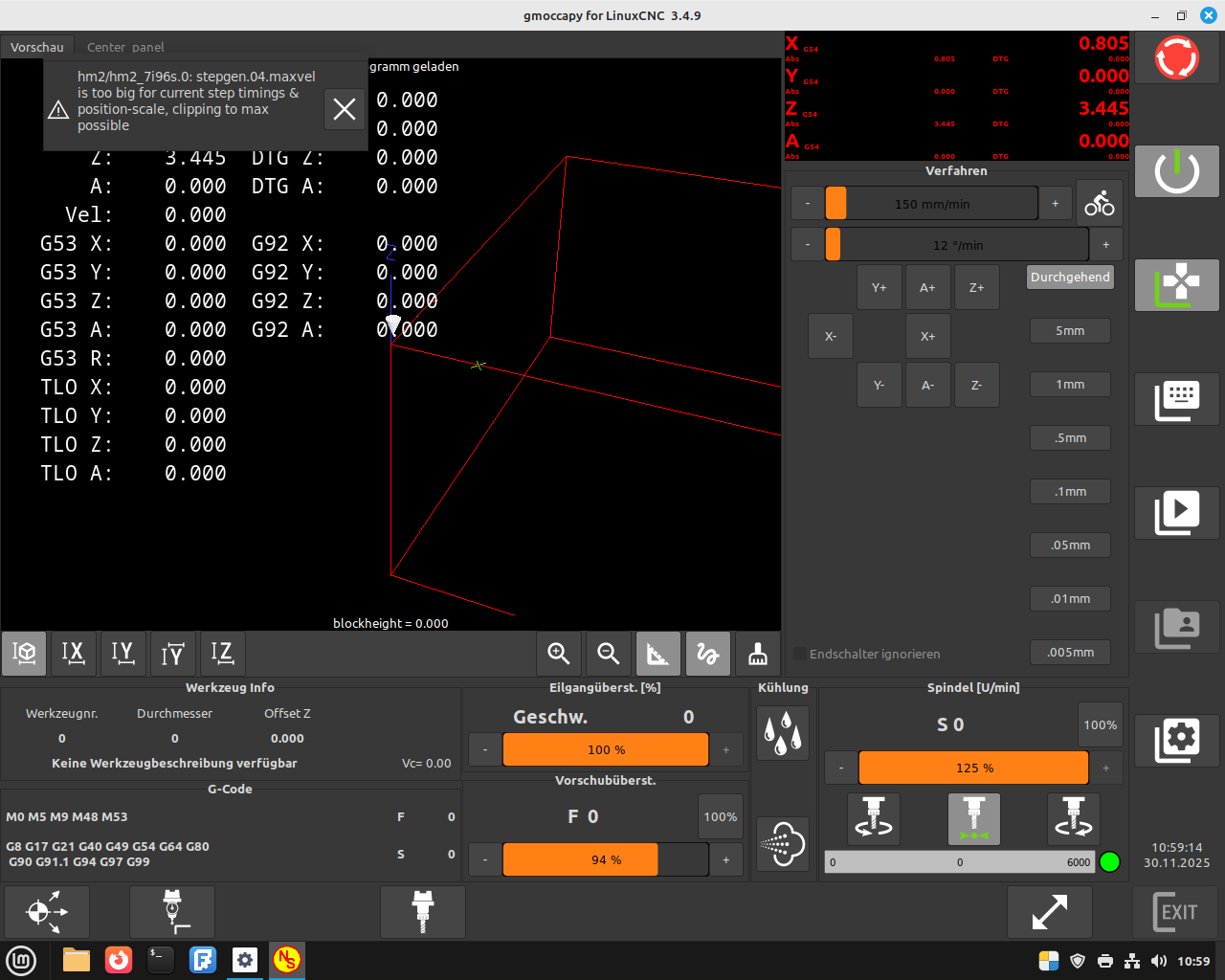
stepgen maxvel too big and MVO problem
- gravedigger
- Offline
- Junior Member
-

- Posts: 20
- Thank you received: 0
The second problem concerns the MVO rotary encoder. The spindle and the normal feed work, but the rapid-feed encoder does not. Even when I swap the inputs for feed and spindle, it still doesn’t work. It seems to be an issue with the GUI/interface? Where can I start looking to solve this?
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-

- Away
- Moderator
-

- Posts: 17481
- Thank you received: 5107
the requested step rate with the current steplength and stepspace parameters.
Options are to:
Lower the steps per turn on the spindle drive
Lower the spindle maximum RPM
Lower the values of the step length and step space parameters
(as long as they still meet the drives minimum width specifications)
The maximum RPM will be 60/(steps per turn(step_length+step_space))
So for example at 10000 steps per turn and 5000 ns (.000005 seconds) for step length
and step space, the maximum RPM would be 600...
Please Log in or Create an account to join the conversation.
- zz912
-

- Offline
- Platinum Member
-

- Posts: 583
- Thank you received: 95
We need more information. Specification encoder? Wiring encoder? What SRO mean?The second problem concerns the SRO rotary encoder. The spindle and the normal feed work, but the rapid-feed encoder does not. Even when I swap the inputs for feed and spindle, it still doesn’t work. It seems to be an issue with the GUI/interface? Where can I start looking to solve this?
Please Log in or Create an account to join the conversation.
- gravedigger
- Offline
- Junior Member
-
- Posts: 20
- Thank you received: 0
Please Log in or Create an account to join the conversation.
- gravedigger
- Offline
- Junior Member
-
- Posts: 20
- Thank you received: 0
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-
- Posts: 19752
- Thank you received: 4584
Which GUI are you using? And how are you overriding (ie, which HAL pins are the counts going to?)
Please Log in or Create an account to join the conversation.
- gravedigger
- Offline
- Junior Member
-
- Posts: 20
- Thank you received: 0
The MOV doesn't work. The spindle and the normal feed work with enc3.
# ---Überschreibung von Signalen zum Mesa-Geber - mpg (feed override signals to mesa encoder - mpg)---
net fo-count <= [HMOT](CARD0).7i73.0.0.enc1.count
# Vorschub-Override-Schritte verbinden - MPG (connect feed override increments - MPG)
setp halui.feed-override.direct-value false
setp halui.feed-override.scale .01
setp halui.feed-override.count-enable true
net fo-count => halui.feed-override.counts
# ---max Geschwindigkeit Neufestsetzungs-Signale an Mesa Encoder - mpg (max velocity override signals to mesa encoder - mpg)---
net mvo-count <= [HMOT](CARD0).7i73.0.0.enc3.count
# verbinde max Geschwindigkeit Neufestetzung Inkrement - MPG (connect max velocity override increments - MPG)
setp halui.max-velocity.direct-value false
setp halui.max-velocity.scale 0.666667
setp halui.max-velocity.count-enable true
net mvo-count => halui.max-velocity.counts
Please Log in or Create an account to join the conversation.
- gravedigger
- Offline
- Junior Member
-
- Posts: 20
- Thank you received: 0
Please Log in or Create an account to join the conversation.