THC2
- islander261
- Offline
- Platinum Member
-

Less
More
- Posts: 757
- Thank you received: 216
16 Apr 2017 15:57 #91459
by islander261
Replied by islander261 on topic THC2
Hello
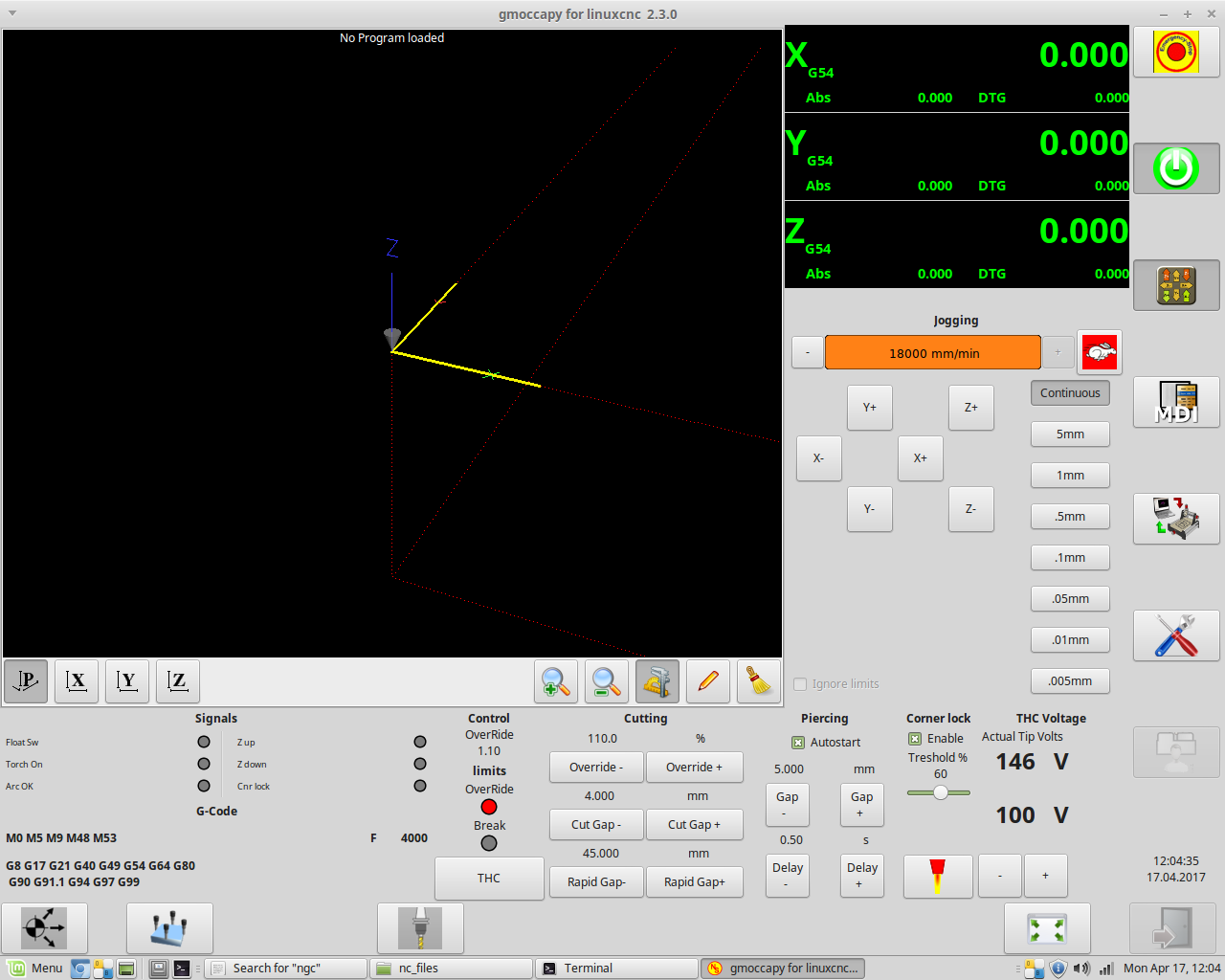
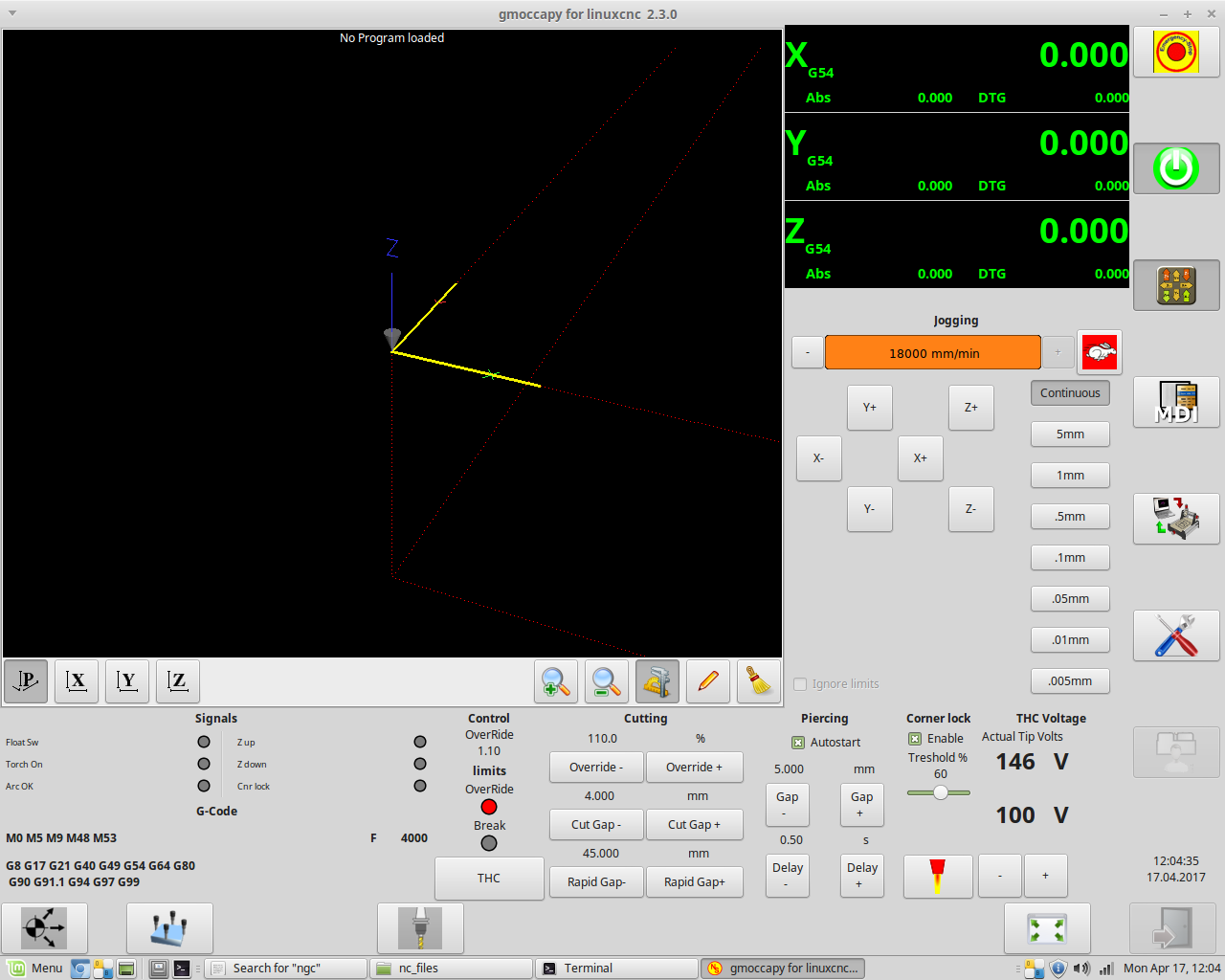
Here is quick screen shot showing my user interface for all the plasma related settings. Some will go away or be modified in the future as find what works well.
John
Here is quick screen shot showing my user interface for all the plasma related settings. Some will go away or be modified in the future as find what works well.
John
The following user(s) said Thank You: tommylight, rodw
Please Log in or Create an account to join the conversation.
- tommylight
-

- Offline
- Moderator
-

Less
More
- Posts: 21686
- Thank you received: 7411
16 Apr 2017 16:58 #91462
by tommylight
Replied by tommylight on topic THC2
Been following this, looks nice so far. I do not have the THCAD, so i use the config i mentioned here several times that i modified, works extremely well vith simple THC's.
I also have two of my own design so i can program them to send any type of signal to the 5 outputs, so i was thinking that i should use those to send the pulses back to the computer, same as THCAD does, as to be able to use this config.
I am pressed for time, so unfortunately i can not help much regarding this.
Great job.
With utmost respect,
Tom
I also have two of my own design so i can program them to send any type of signal to the 5 outputs, so i was thinking that i should use those to send the pulses back to the computer, same as THCAD does, as to be able to use this config.
I am pressed for time, so unfortunately i can not help much regarding this.
Great job.
With utmost respect,
Tom
Please Log in or Create an account to join the conversation.
- rodw
-

- Offline
- Platinum Member
-
Less
More
- Posts: 11980
- Thank you received: 4082
17 Apr 2017 03:09 #91493
by rodw
Replied by rodw on topic THC2
John, your screen is very comprehensive and makes mine quite modest by comparison..
I tried using glade to edit the GUI screens and while I could open plasma.glade, it broke it when I saved it. Anybody got any ideas on what might cause this?
I've now got all of the main items hooked up with the exception of piercing parameters, cut height and rapid height. As these are currently set in gcode, I have not bothered with them for now.
I did not think THC speed was relevant anymore so I've repurposed the buttons for feed override.
Cnr Lock LED lights up when the velocity is below the eoffset_pid minimum velocity,
There is also an LED indicator that is turned on if a feed override is programmed as well as one for torch breakaway.
I'll also have a look at the kerf crossing as it looks simple enough and will post it up as I've done with the other components I've written.
I tried using glade to edit the GUI screens and while I could open plasma.glade, it broke it when I saved it. Anybody got any ideas on what might cause this?
I've now got all of the main items hooked up with the exception of piercing parameters, cut height and rapid height. As these are currently set in gcode, I have not bothered with them for now.
I did not think THC speed was relevant anymore so I've repurposed the buttons for feed override.
Cnr Lock LED lights up when the velocity is below the eoffset_pid minimum velocity,
There is also an LED indicator that is turned on if a feed override is programmed as well as one for torch breakaway.
I'll also have a look at the kerf crossing as it looks simple enough and will post it up as I've done with the other components I've written.
Please Log in or Create an account to join the conversation.
- islander261
- Offline
- Platinum Member
-
Less
More
- Posts: 757
- Thank you received: 216
17 Apr 2017 04:06 #91494
by islander261
Replied by islander261 on topic THC2
Rod
I had quite a go of it when I installed Glade. I think you need 3.8.5 with added GTK2 libraries. I followed many instructions posted on the forum here and finally one worked. I would not have been able to edit my screen and tabs without it. It has only minorly broken screens a few times but they where all fixable in XML.
I will attach a crude kerf crossing comp to this post.
John
I had quite a go of it when I installed Glade. I think you need 3.8.5 with added GTK2 libraries. I followed many instructions posted on the forum here and finally one worked. I would not have been able to edit my screen and tabs without it. It has only minorly broken screens a few times but they where all fixable in XML.
I will attach a crude kerf crossing comp to this post.
John
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 11980
- Thank you received: 4082
17 Apr 2017 04:44 - 17 Apr 2017 04:46 #91496
by rodw
Replied by rodw on topic THC2
John, Thanks, I found some of your posts. I can edit with glade, just the config breaks when it runs. I only had one go at it so will play around.
Since my last post, I also knocked up a kerfcrossing component but I can see it could be improved.
I like the idea of a delay and that you dynamically calculate it but a diagonal cut or crossing a leadin might need more than the kerf width
I think it probably should monitor ArcOK so that it resets itself if it looses an arc.
Since my last post, I also knocked up a kerfcrossing component but I can see it could be improved.
pin in float torch_volts "Live torch Volts";
pin in float threshold "Threshold change in torch volts (Volts per millisecond)";
pin in bit enabled "Set to TRUE to enable kerf crossing detection";
pin out bit active "True if torch volts exceeds the threshold change";
function _;
license "GPL";
;;
#include <rtapi_math.h>
float last_volts = 0.0;
FUNCTION(_) {
if(enabled){
if(last_volts > 0.0){ // only do something if we have got a previous volt reading
if(torch_volts > last_volts){ // volts have increased, we will ignore falling volts
if((torch_volts - last_volts) > threshold)
active = 1;
else
active = 0;
}
if(active) // turn off
active = 0;
}
}
last_volts = torch_volts;
}I like the idea of a delay and that you dynamically calculate it but a diagonal cut or crossing a leadin might need more than the kerf width
I think it probably should monitor ArcOK so that it resets itself if it looses an arc.
Last edit: 17 Apr 2017 04:46 by rodw.
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 11980
- Thank you received: 4082
18 Apr 2017 12:55 #91577
by rodw
Replied by rodw on topic THC2
I've hit a bit of a snag with the eoffset_pid component. I've printed out my config and the other docs and ticked off all of the settings and I'm certain its installed correctly. I'm using steppers, gmoccapy and a 7i76e. I've also commented out all of the pin connections and the error persists.
No matter what I do, I continue to get following errors on the Z axis joint after it moves. If I home the axis, after it homes, it moves the exact distance set by MIN_FERROR in the ini file before halting with a following error.
If I turn it on and don't home the axis when I jog the axis, the same thing happens.
In both of the above instances, whenever I press the GUI power button, the axis moves on its own slowly and halts with a following error
I played with STEPGEN_MAXVEL and STEPGEN_MAXACCEL and a few other ini file settings and nothing changes.
When I look at the eoffset_pid via Halshow the only thing that changes is the LED to say Eoffsets are on.
I was bitten by this behaviour a week or so ago and I thought I had hardware errors and reworked all of my gantry wiring before building a new version step by step. When I revisit those old configs, the behaviour is identical.
I've not seen this happen with steppers before, maybe someone else has, but if you have any ideas on where I should look, it would be appreciated.
No matter what I do, I continue to get following errors on the Z axis joint after it moves. If I home the axis, after it homes, it moves the exact distance set by MIN_FERROR in the ini file before halting with a following error.
If I turn it on and don't home the axis when I jog the axis, the same thing happens.
In both of the above instances, whenever I press the GUI power button, the axis moves on its own slowly and halts with a following error
I played with STEPGEN_MAXVEL and STEPGEN_MAXACCEL and a few other ini file settings and nothing changes.
When I look at the eoffset_pid via Halshow the only thing that changes is the LED to say Eoffsets are on.
I was bitten by this behaviour a week or so ago and I thought I had hardware errors and reworked all of my gantry wiring before building a new version step by step. When I revisit those old configs, the behaviour is identical.
I've not seen this happen with steppers before, maybe someone else has, but if you have any ideas on where I should look, it would be appreciated.
Please Log in or Create an account to join the conversation.
- islander261
- Offline
- Platinum Member
-
Less
More
- Posts: 757
- Thank you received: 216
18 Apr 2017 13:42 #91580
by islander261
Replied by islander261 on topic THC2
Rod
I am only running the Z axis with eoffsets_pid now as well. My install has worked fine out of the box, no uncommanded moves. Homes and touches off correctly, fingers aren't fast enough on the test switches to reliably make shift to the cutting state for actual cut tests.
Now I still have problems with my store parameters loading reliably into Gmocappy. The files are always correct.
John
John
I am only running the Z axis with eoffsets_pid now as well. My install has worked fine out of the box, no uncommanded moves. Homes and touches off correctly, fingers aren't fast enough on the test switches to reliably make shift to the cutting state for actual cut tests.
Now I still have problems with my store parameters loading reliably into Gmocappy. The files are always correct.
John
John
Please Log in or Create an account to join the conversation.
- tommylight
-
- Offline
- Moderator
-
Less
More
- Posts: 21686
- Thank you received: 7411
18 Apr 2017 15:54 #91586
by tommylight
Replied by tommylight on topic THC2
Rod,
Missing feedback in hal or wired incorrectly in hal ???
Missing feedback in hal or wired incorrectly in hal ???
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 11980
- Thank you received: 4082
18 Apr 2017 21:20 #91600
by rodw
Replied by rodw on topic THC2
I've spent an hour going through this this morning and auditing every signal and pin and everything seems correct with eoffset_pid.
zo.command is set to torch requested volts
zo.feedback is set to torch actual volts
It still happens. and because the axis moves, I got this error
On soft limit is OK as the DRO was reading 2.001, so is outside of soft limits. the Misconfigured error is coming from emctaskmain.cc
With a joint axis, I don't have kinstype=both in the .ini file so I don't have a joint mode so from what I can see, LinuxCNC is making an incorrect (or maybe obsolete) assumption for a Joint Axis machine. Anyway, whilst probably a Linuxcnc bug, I think that is a red herring as it is a symptom not a cause. If I put kinstype=both, Gmocappy shows me joint homing buttons and not X,Y,Z buttons. I thank I am correct there as Norbert has fixed a bug I found.
I'm at a bit of a loss.
zo.command is set to torch requested volts
zo.feedback is set to torch actual volts
It still happens. and because the axis moves, I got this error
On Soft Limit
Identity kinematics are MISCONFIGURED
Exceeded POSITIVE soft limit (1.10000) on joint 3On soft limit is OK as the DRO was reading 2.001, so is outside of soft limits. the Misconfigured error is coming from emctaskmain.cc
// if gui does not provide a means to switch to joint mode
// the machine may be stuck (a misconfiguration)
if (emcmotConfig.kinType == KINEMATICS_IDENTITY) {
emcOperatorError(0,"Identity kinematics are MISCONFIGURED");With a joint axis, I don't have kinstype=both in the .ini file so I don't have a joint mode so from what I can see, LinuxCNC is making an incorrect (or maybe obsolete) assumption for a Joint Axis machine. Anyway, whilst probably a Linuxcnc bug, I think that is a red herring as it is a symptom not a cause. If I put kinstype=both, Gmocappy shows me joint homing buttons and not X,Y,Z buttons. I thank I am correct there as Norbert has fixed a bug I found.
I'm at a bit of a loss.
Please Log in or Create an account to join the conversation.
- rodw
-
- Offline
- Platinum Member
-
Less
More
- Posts: 11980
- Thank you received: 4082
18 Apr 2017 21:25 #91603
by rodw
Replied by rodw on topic THC2
The only other thought I have is my machine joints are configured as XXYZ. I think most gantries are configured as XYYZ. This has unearthed some LCNC bugs along the way that Norbert and I think some others have fixed in Master.
John, how is your machine configured?
John, how is your machine configured?
Please Log in or Create an account to join the conversation.
Moderators: snowgoer540
Time to create page: 0.200 seconds