PID tuning for LS Mecapion setup with MESA 7i77
- alex.statie
- Offline
- New Member
-

Less
More
- Posts: 19
- Thank you received: 1
25 Mar 2020 09:11 #161407
by alex.statie
PID tuning for LS Mecapion setup with MESA 7i77 was created by alex.statie
Hello everyone!
Trying to PID tune the following setup:
L7SA004A Driver and APM-SB04 motor controlled by Analog Speed input Mesa 7i77.
The setup works overall, but the motor encounters periodic shocks.
Attached the hal scope:

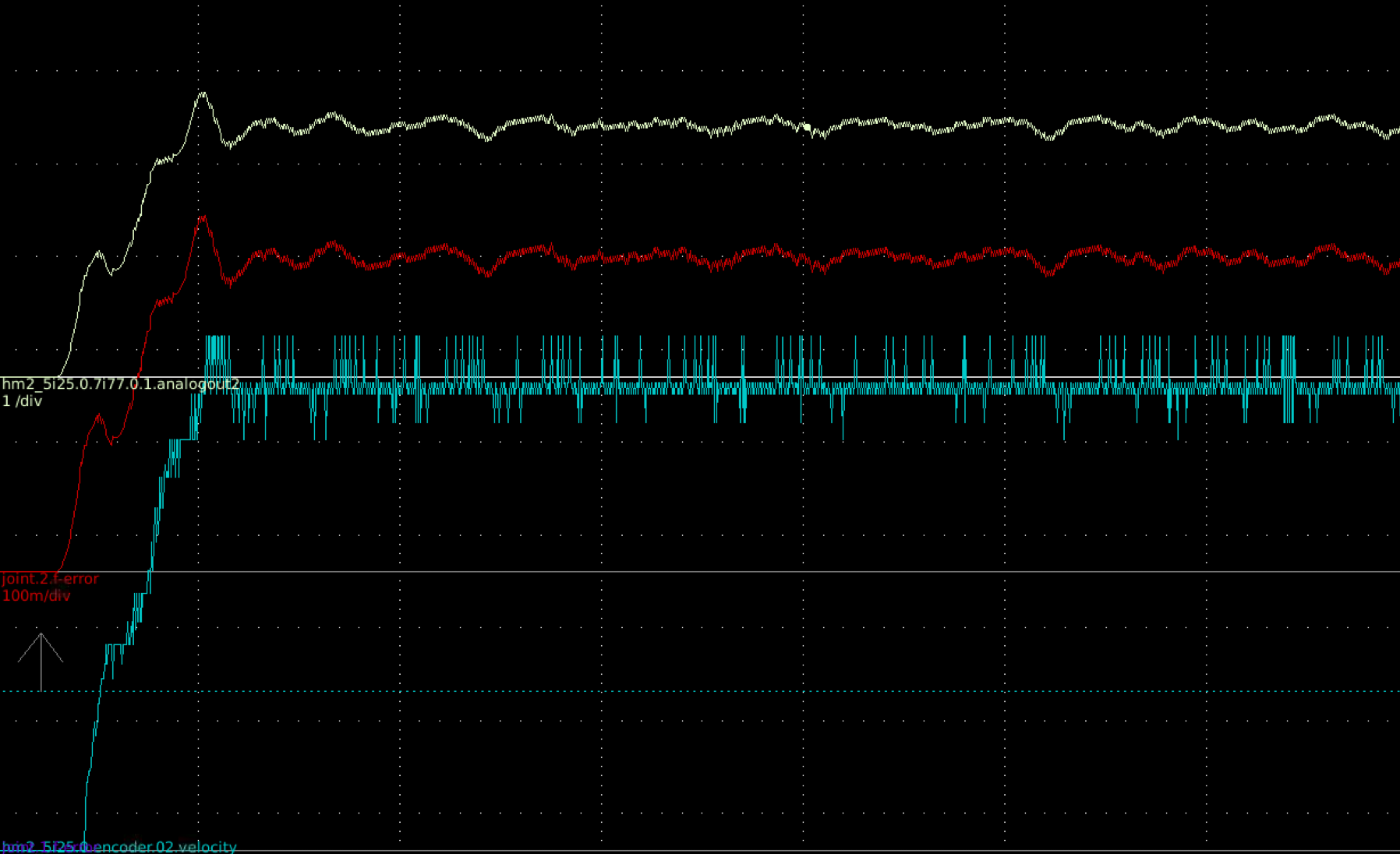
Any idea what causes this shocks?
Thanks!
Trying to PID tune the following setup:
L7SA004A Driver and APM-SB04 motor controlled by Analog Speed input Mesa 7i77.
The setup works overall, but the motor encounters periodic shocks.
Attached the hal scope:
Any idea what causes this shocks?
Thanks!
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17961
- Thank you received: 5265
25 Mar 2020 09:56 #161409
by PCW
Replied by PCW on topic PID tuning for LS Mecapion setup with MESA 7i77
Hard to tell if this is a noise issue or a tuning issue
Can you post your hal/ini files?
Can you post your hal/ini files?
Please Log in or Create an account to join the conversation.
- alex.statie
- Offline
- New Member
-
Less
More
- Posts: 19
- Thank you received: 1
25 Mar 2020 10:18 #161411
by alex.statie
Replied by alex.statie on topic PID tuning for LS Mecapion setup with MESA 7i77
Attached.
The "problem" is on Axis Y - joint 2
Thank you!
The "problem" is on Axis Y - joint 2
Thank you!
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17961
- Thank you received: 5265
25 Mar 2020 10:37 #161414
by PCW
Replied by PCW on topic PID tuning for LS Mecapion setup with MESA 7i77
Just to test whether this is a noise issue, can you set the encoder sample frequency to 1 MHZ (1000,000)
Note that if the drives are in velocity mode, FF1 does 99% of the tuning
Note that if the drives are in velocity mode, FF1 does 99% of the tuning
Please Log in or Create an account to join the conversation.
- alex.statie
- Offline
- New Member
-
Less
More
- Posts: 19
- Thank you received: 1
25 Mar 2020 12:26 #161421
by alex.statie
Replied by alex.statie on topic PID tuning for LS Mecapion setup with MESA 7i77
Could you please give me just a bit more info on how to do that?
Should i create a new thread with higher frequency and assign the halscope to that thread?
Should i create a new thread with higher frequency and assign the halscope to that thread?
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17961
- Thank you received: 5265
25 Mar 2020 14:12 #161431
by PCW
Replied by PCW on topic PID tuning for LS Mecapion setup with MESA 7i77
setp hm2_5i25.0.encoder.muxed-sample-frequency 1000000
Please Log in or Create an account to join the conversation.
- alex.statie
- Offline
- New Member
-
Less
More
- Posts: 19
- Thank you received: 1
25 Mar 2020 14:28 #161436
by alex.statie
Replied by alex.statie on topic PID tuning for LS Mecapion setup with MESA 7i77
Thank you!!
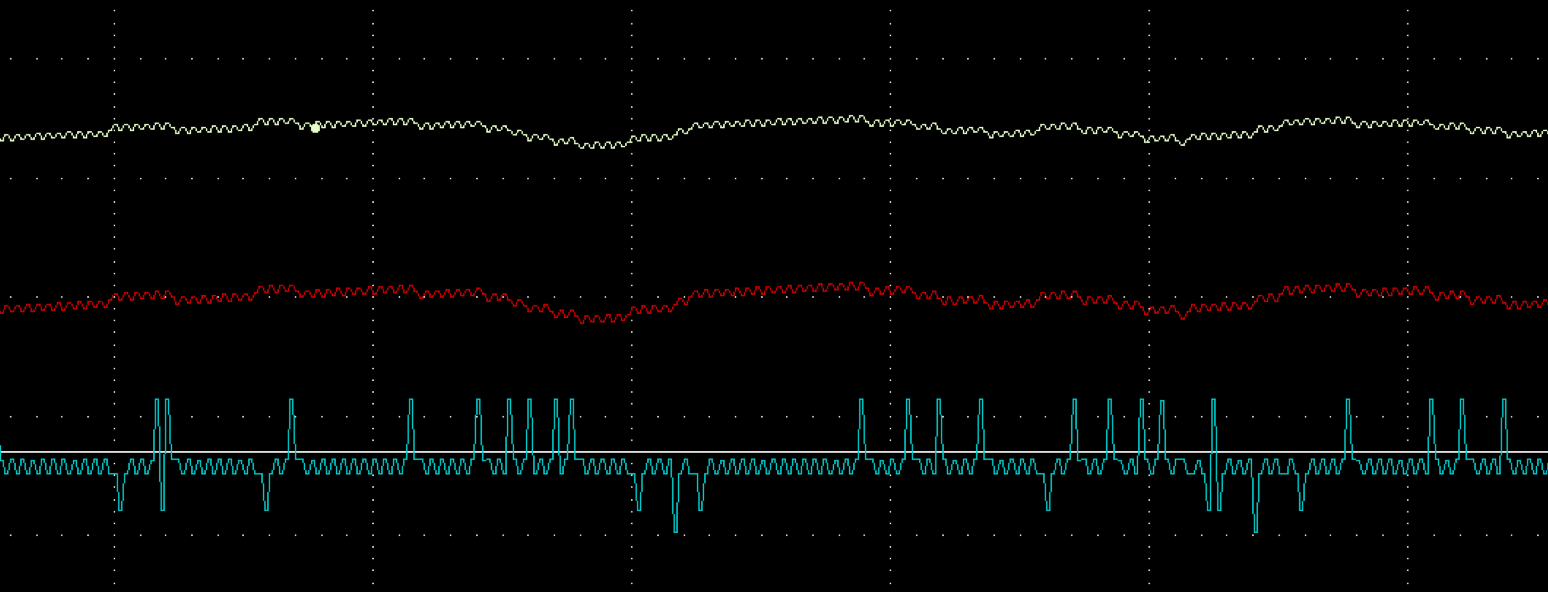
Added the config in the hal file and rerun the test.
By the way, also triggered a servo auto gain tuning in the meantime - nothing has changed.
Added the config in the hal file and rerun the test.
By the way, also triggered a servo auto gain tuning in the meantime - nothing has changed.
Attachments:
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17961
- Thank you received: 5265
25 Mar 2020 14:34 #161439
by PCW
Replied by PCW on topic PID tuning for LS Mecapion setup with MESA 7i77
Can you lower the P term to say 0.5 to see if the noise is feedback related?
also including the complete halscope screen would help (so the time/div is visible)
also including the complete halscope screen would help (so the time/div is visible)
Please Log in or Create an account to join the conversation.
- alex.statie
- Offline
- New Member
-
Less
More
- Posts: 19
- Thank you received: 1
25 Mar 2020 14:44 - 25 Mar 2020 14:45 #161443
by alex.statie
Replied by alex.statie on topic PID tuning for LS Mecapion setup with MESA 7i77
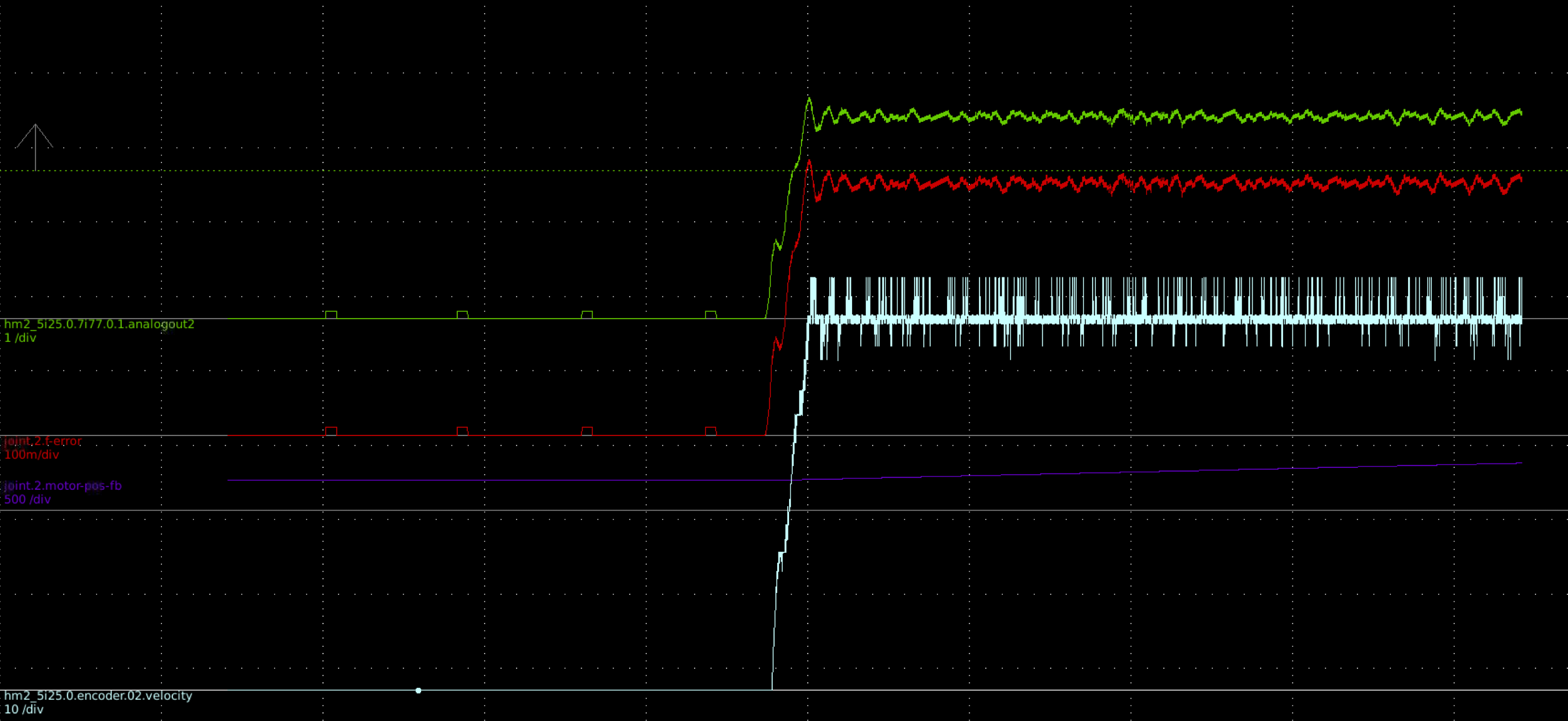
Lowered P to 0.5
Had to run at a much lower speed - from F3000 to F300 - otherwise i would trigger following error with this P value.
Here is the result:

Had to run at a much lower speed - from F3000 to F300 - otherwise i would trigger following error with this P value.
Here is the result:
Attachments:
Last edit: 25 Mar 2020 14:45 by alex.statie.
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17961
- Thank you received: 5265
25 Mar 2020 14:58 #161447
by PCW
Replied by PCW on topic PID tuning for LS Mecapion setup with MESA 7i77
Note: you need to tune FF1 to lower the following error, this should be done at
a low P value
Use the calibrate menu and adjust FF1 so the following error is minimized
If error is in the same direction as the velocity (like the plot above) you have
too little FF1, If the error is in the opposite direction of the velocity, you have too
much FF1
This should allow you to get to the previous speed
a low P value
Use the calibrate menu and adjust FF1 so the following error is minimized
If error is in the same direction as the velocity (like the plot above) you have
too little FF1, If the error is in the opposite direction of the velocity, you have too
much FF1
This should allow you to get to the previous speed
Please Log in or Create an account to join the conversation.
Moderators: snowgoer540
Time to create page: 0.235 seconds