Probe Basic and Carousel ATC with Geneva and Stepper
- IB_CnC
- Offline
- Senior Member
-

Less
More
- Posts: 42
- Thank you received: 14
19 Apr 2025 10:34 - 19 Apr 2025 10:38 #326680
by IB_CnC
Probe Basic and Carousel ATC with Geneva and Stepper was created by IB_CnC
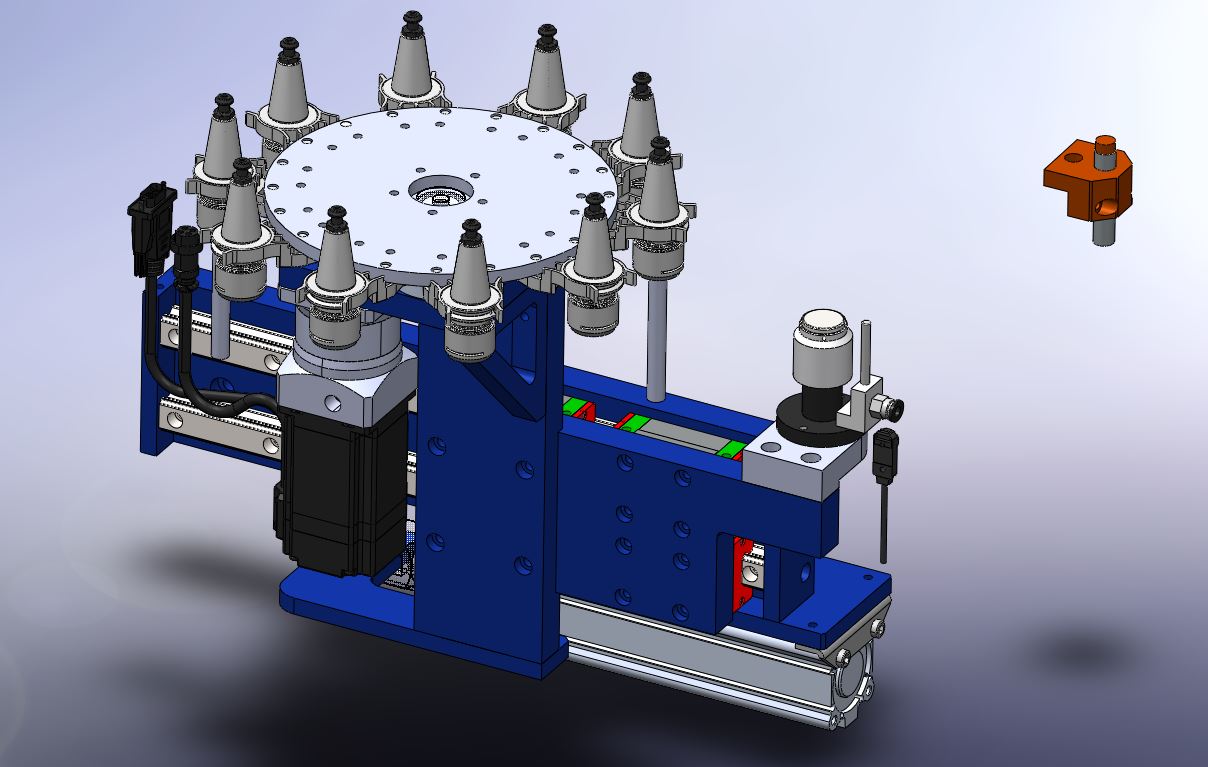
Hi, i've build a gantry piggy back toolchanger for my router, driven by a stepper (with gear reduction) and a geneva wheel, and am looking for some quick pointers.
At this point I've got it to rotate, creating an extra axis in HAL / INI, nothing else.
I was planning to use the stepper 'velocity mode' to drive the stepper.
I envision I need to place two proximity sensors:
At this point I've got it to rotate, creating an extra axis in HAL / INI, nothing else.
I was planning to use the stepper 'velocity mode' to drive the stepper.
I envision I need to place two proximity sensors:
- Prox sensor for homing pin
- Prox sensor to detect an index step, for counting logic of the pockets
How does the base Probe Basic configuration handle pocket homing (locating pocket nr 1), counting pockets and the drive signals to the motor?
Some clips of the geneva mechanism:
Attachments:
Last edit: 19 Apr 2025 10:38 by IB_CnC.
Please Log in or Create an account to join the conversation.
- IB_CnC
- Offline
- Senior Member
-
Less
More
- Posts: 42
- Thank you received: 14
19 Apr 2025 10:45 - 19 Apr 2025 10:50 #326681
by IB_CnC
Replied by IB_CnC on topic Probe Basic and Carousel ATC with Geneva and Stepper
I think I already found most of what I was looking for, as I just found:
github.com/kcjengr/probe_basic/blob/main...toolchange_index.hal :-))
Still have to find out the best approach to map the stepper drive signal in velocity mode to
net car-ccw motion.digital-out-03
net car-cw motion.digital-out-04
github.com/kcjengr/probe_basic/blob/main...toolchange_index.hal :-))
Still have to find out the best approach to map the stepper drive signal in velocity mode to
net car-ccw motion.digital-out-03
net car-cw motion.digital-out-04
Last edit: 19 Apr 2025 10:50 by IB_CnC.
Please Log in or Create an account to join the conversation.
- IB_CnC
- Offline
- Senior Member
-
Less
More
- Posts: 42
- Thank you received: 14
19 Apr 2025 23:44 - 19 Apr 2025 23:55 #326741
by IB_CnC
Replied by IB_CnC on topic Probe Basic and Carousel ATC with Geneva and Stepper
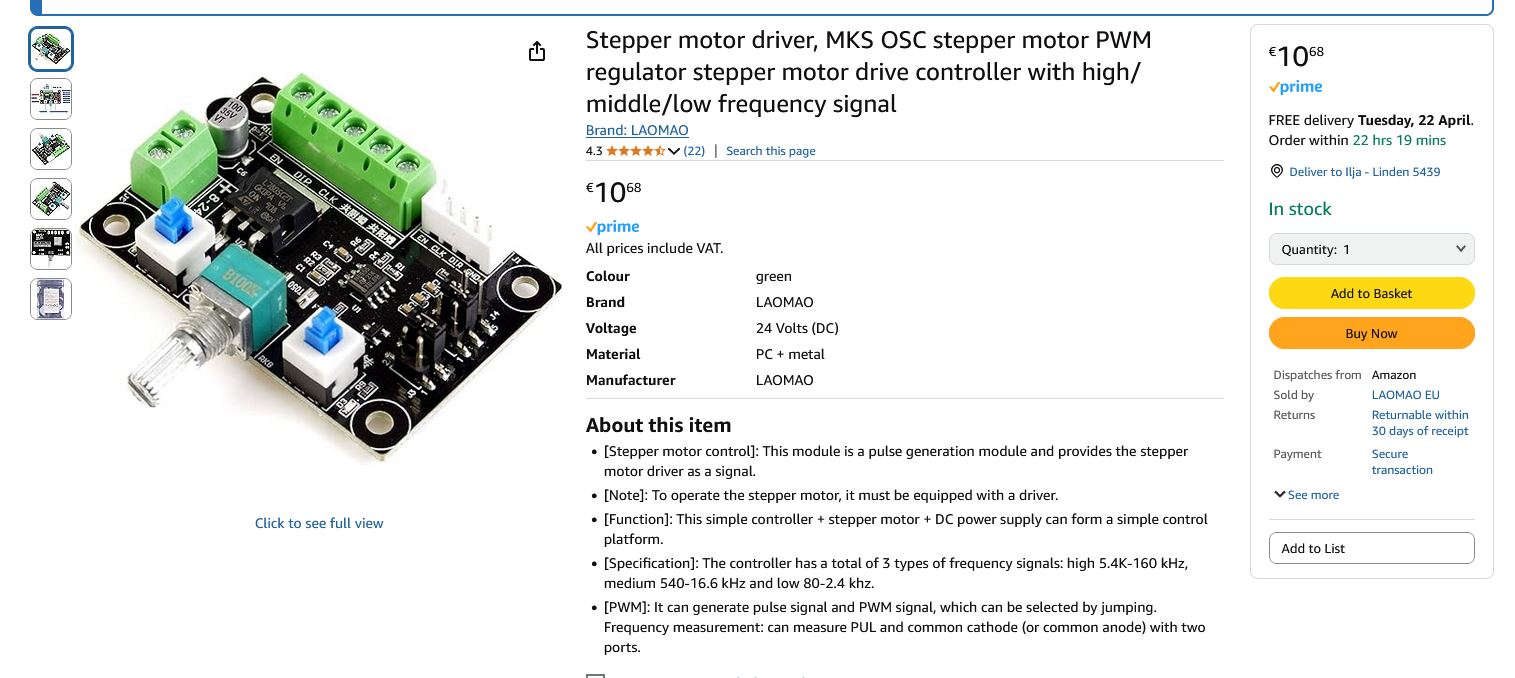
In order to control the ATC stepper motor like a "dumb DC motor" with just the DI-Outputs mapped to my MESA outputs and free up the stepgen on the MESA for other future purposes, I simply purchased a step generator from amazon (10 bucks) and two relays.
I will just use the relays to trigger the board start/ stop and direction tactile buttons (solder to button pins).
Should work fine in combination with the geneva drive..")
I still have to find good sensor flag positions for Home and Index, but that should be solvable.
I will just use the relays to trigger the board start/ stop and direction tactile buttons (solder to button pins).
Should work fine in combination with the geneva drive..
I still have to find good sensor flag positions for Home and Index, but that should be solvable.
Attachments:
Last edit: 19 Apr 2025 23:55 by IB_CnC.
Please Log in or Create an account to join the conversation.
- IB_CnC
- Offline
- Senior Member
-
Less
More
- Posts: 42
- Thank you received: 14
20 Apr 2025 11:16 - 20 Apr 2025 11:27 #326753
by IB_CnC
Replied by IB_CnC on topic Probe Basic and Carousel ATC with Geneva and Stepper
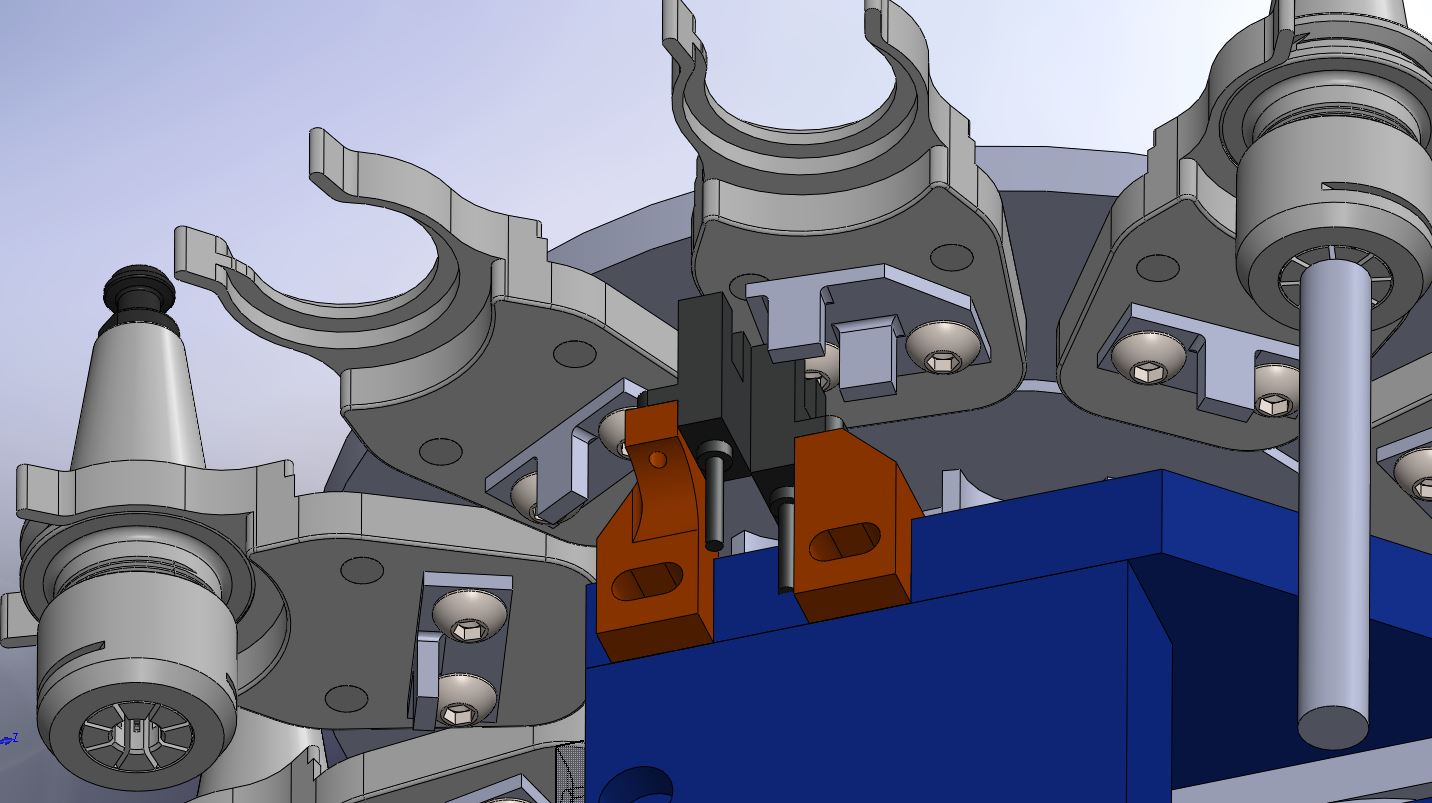
About the Index sensor - Pocket sensor vs drive wheel sensor
This could be a design issue, but if I look at my geneva mechanism I think for indexing ideally you would want to detect the pin on the geneva drive wheel, so the drive wheel is fully locked in the geneva wheel.
If you detect just a pocket pin, the drive motor and drive pin will stop at the disengagement position of the pin, where the lobe takes over.
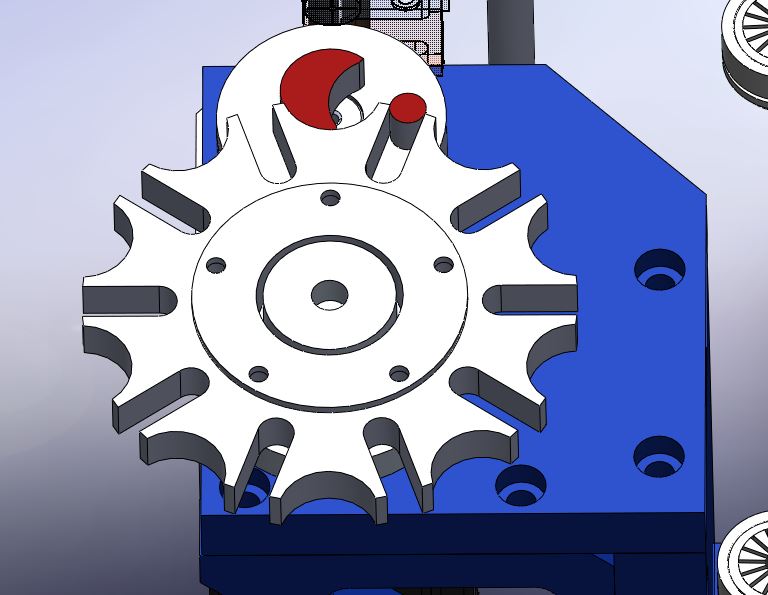
If I detect the drive pin on the drive wheel, it would allow for more error margin as the lobe is fully engaged.
But this would require both the index sensor and homing sensor to be high to complete initial homing.
Otherwise the first index move after homing could be false, depending on the direction.
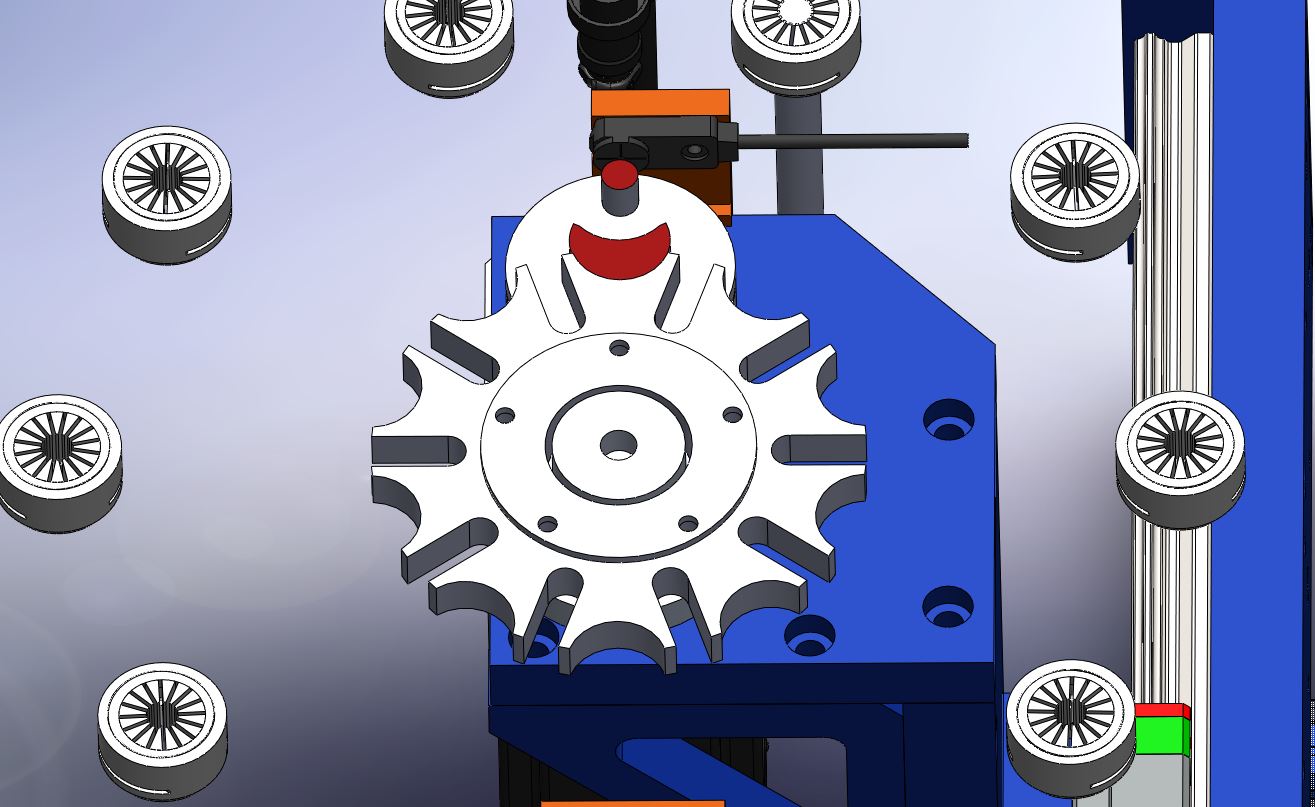
What is the usual way to do this?
If I check the subroutines the M13 homing cycle is not considering the index sensor, only the homing sensor.
Maybe bind Index sensor to the Homing sensor input signal in HAL using AND2 ?
This could be a design issue, but if I look at my geneva mechanism I think for indexing ideally you would want to detect the pin on the geneva drive wheel, so the drive wheel is fully locked in the geneva wheel.
If you detect just a pocket pin, the drive motor and drive pin will stop at the disengagement position of the pin, where the lobe takes over.
If I detect the drive pin on the drive wheel, it would allow for more error margin as the lobe is fully engaged.
But this would require both the index sensor and homing sensor to be high to complete initial homing.
Otherwise the first index move after homing could be false, depending on the direction.
What is the usual way to do this?
If I check the subroutines the M13 homing cycle is not considering the index sensor, only the homing sensor.
Maybe bind Index sensor to the Homing sensor input signal in HAL using AND2 ?
Attachments:
Last edit: 20 Apr 2025 11:27 by IB_CnC.
Please Log in or Create an account to join the conversation.
- IB_CnC
- Offline
- Senior Member
-
Less
More
- Posts: 42
- Thank you received: 14
20 Apr 2025 12:14 - 25 Apr 2025 18:14 #326758
by IB_CnC
Replied by IB_CnC on topic Probe Basic and Carousel ATC with Geneva and Stepper
Detecting the drive pin could also cause parameter tracking issues if an anomaly happens.
Maybe detecting pocket pins on each index and a homing pin is better.
And just make the motor stop with a slight delay, so the geneva drive fully engages.
By e.g using M65 P4 Qxx in subroutines.
Maybe detecting pocket pins on each index and a homing pin is better.
And just make the motor stop with a slight delay, so the geneva drive fully engages.
By e.g using M65 P4 Qxx in subroutines.
Last edit: 25 Apr 2025 18:14 by IB_CnC.
Please Log in or Create an account to join the conversation.
- IB_CnC
- Offline
- Senior Member
-
Less
More
- Posts: 42
- Thank you received: 14
25 Apr 2025 18:14 #327053
by IB_CnC
Replied by IB_CnC on topic Probe Basic and Carousel ATC with Geneva and Stepper
Going to try to get it going with some Optical sensors.
One of the pockets has a double flag to include the homing, all other pockets only 1 flag to detect the index position.
Printer is churning them out at the moment, should be able to test if it works over the weekend.
One of the pockets has a double flag to include the homing, all other pockets only 1 flag to detect the index position.
Printer is churning them out at the moment, should be able to test if it works over the weekend.
Attachments:
Please Log in or Create an account to join the conversation.
- tommylight
-

- Online
- Moderator
-

Less
More
- Posts: 21768
- Thank you received: 7440
25 Apr 2025 20:17 #327055
by tommylight
Replied by tommylight on topic Probe Basic and Carousel ATC with Geneva and Stepper
Printer? As in 3D printer?
Printer is churning them out at the moment, should be able to test if it works over the weekend.
Please Log in or Create an account to join the conversation.
- IB_CnC
- Offline
- Senior Member
-
Less
More
- Posts: 42
- Thank you received: 14
25 Apr 2025 22:21 #327059
by IB_CnC
Replied by IB_CnC on topic Probe Basic and Carousel ATC with Geneva and Stepper
Yes, I have a Voron v0.1 for small parts (120x120x120) and a Hevort for big parts (450x450x600 volume). Pretty sweet for sensor brackets and that kind of stuff.
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- tommylight
-
- Online
- Moderator
-
Less
More
- Posts: 21768
- Thank you received: 7440
25 Apr 2025 23:47 #327066
by tommylight
Replied by tommylight on topic Probe Basic and Carousel ATC with Geneva and Stepper
Nice, i like the Voron 0 a lot.
I have 5 of Voron 2.4R2 that i built, some with modified Y and Z to use linear rods instead of rails.
If it works out, what are the chances of making the files available?
We already had and DIY ATC here but somehow it went quiet...
I have 5 of Voron 2.4R2 that i built, some with modified Y and Z to use linear rods instead of rails.
If it works out, what are the chances of making the files available?
We already had and DIY ATC here but somehow it went quiet...
Please Log in or Create an account to join the conversation.
- IB_CnC
- Offline
- Senior Member
-
Less
More
- Posts: 42
- Thank you received: 14
26 Apr 2025 09:19 #327078
by IB_CnC
Replied by IB_CnC on topic Probe Basic and Carousel ATC with Geneva and Stepper
I like the Voron as well, especially since it's so small and silent but still pretty fast.
Print quality is very good as well.
The Hevort is a different animal, can go really fast and the bed is positioned on 3 ballscrews with individual steppers, allowing for automatic tilt correction after probing the surface.
It's this one:
But I made the Hevort way too big. I was printing molds at the time, but big 3D prints are a hassle and I now made the CNC for that. A smaller printer is more stable and keeps a better consistent temperature to my experience.
Print quality is very good as well.
The Hevort is a different animal, can go really fast and the bed is positioned on 3 ballscrews with individual steppers, allowing for automatic tilt correction after probing the surface.
It's this one:
But I made the Hevort way too big. I was printing molds at the time, but big 3D prints are a hassle and I now made the CNC for that. A smaller printer is more stable and keeps a better consistent temperature to my experience.
Please Log in or Create an account to join the conversation.
Moderators: KCJ, Lcvette
Time to create page: 0.543 seconds