Red Machine Outline is backwards in Y dimension
- Vector
-
 Topic Author
Topic Author
- Offline
- Premium Member
-

Less
More
- Posts: 112
- Thank you received: 27
20 Feb 2025 23:33 - 20 Feb 2025 23:35 #322129
by Vector
Red Machine Outline is backwards in Y dimension was created by Vector
This is so specific, I'm guessing I've got a bone-headed mistake.
I've attached my .ini and a couple of screenshots.
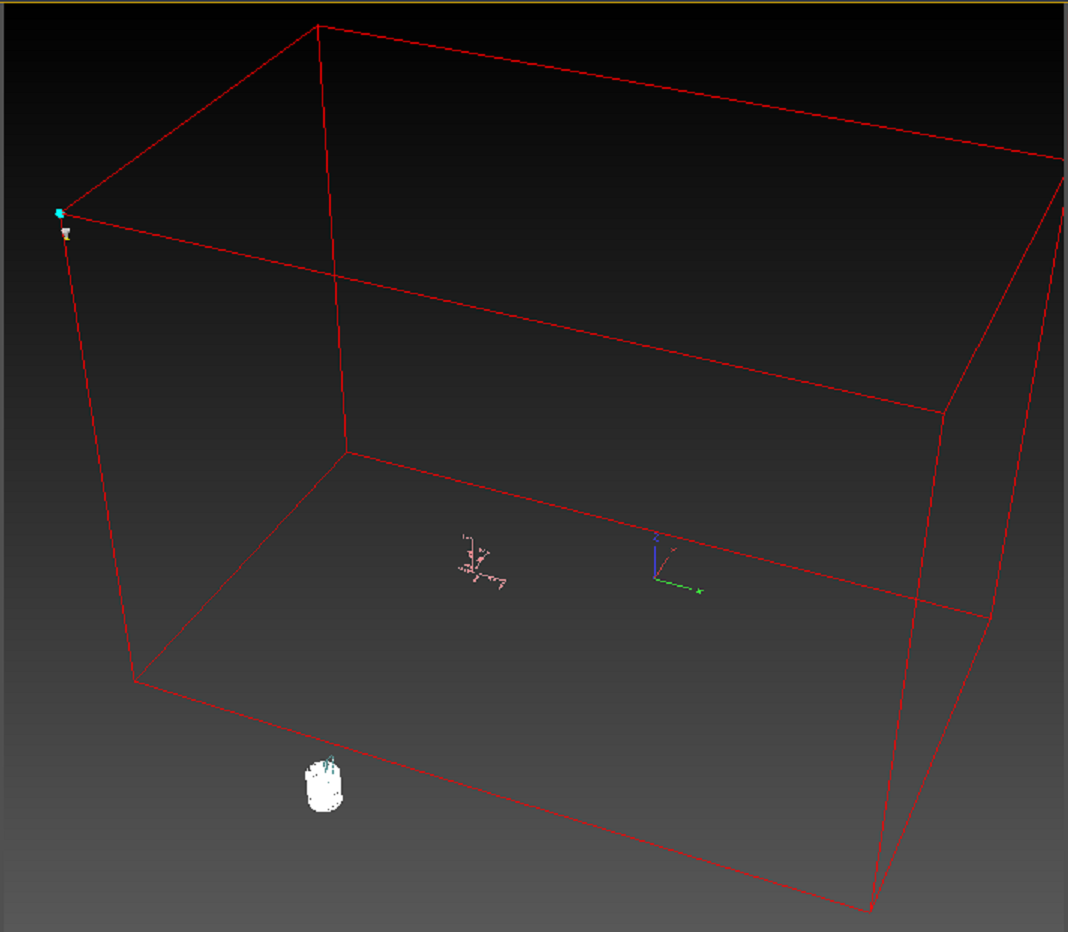
My machine lines are showing going to the back of the Y=0 line, not in front.
All my homing and jogging and machine movements are correct.
I do have GEOMETRY = X-YZBC, but the red machine lines are out the back of the machine if I turn that to XYZBC, and when I set it without the -Y, movement in the display is mirrored in Y
My Y home sensor is in the back, X to the left, and Z on top, so the machine is oriented:
Z: Top is zero, Down is Negative; X: Far Left is zero, right is positive; Y: Far Back is zero, forward is positive.
Can I keep those orientations and get the red lines to show around the actual working space?
The inconvenience here includes that the measurement lines are inside the machine space, but waaay back from where it's visualizing the program (the white spiral lines).
The white spiral lines are in the right place, but the measurement lines and the axis lines and the red machine outline are all backwards with respect to Y.
(I'm on linuxcnc-uspace 1:2.9.4, and QtDragon)
I've attached my .ini and a couple of screenshots.
My machine lines are showing going to the back of the Y=0 line, not in front.
All my homing and jogging and machine movements are correct.
I do have GEOMETRY = X-YZBC, but the red machine lines are out the back of the machine if I turn that to XYZBC, and when I set it without the -Y, movement in the display is mirrored in Y
My Y home sensor is in the back, X to the left, and Z on top, so the machine is oriented:
Z: Top is zero, Down is Negative; X: Far Left is zero, right is positive; Y: Far Back is zero, forward is positive.
Can I keep those orientations and get the red lines to show around the actual working space?
The inconvenience here includes that the measurement lines are inside the machine space, but waaay back from where it's visualizing the program (the white spiral lines).
The white spiral lines are in the right place, but the measurement lines and the axis lines and the red machine outline are all backwards with respect to Y.
(I'm on linuxcnc-uspace 1:2.9.4, and QtDragon)
Last edit: 20 Feb 2025 23:35 by Vector. Reason: Added version and gui
Please Log in or Create an account to join the conversation.
- Vector
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 112
- Thank you received: 27
21 Feb 2025 06:29 #322171
by Vector
Replied by Vector on topic Red Machine Outline is backwards in Y dimension
Argh!
Before anyone looks at this, it seems I do still have myself backwards.
I'm sure once I put my pants on front-wise I'll be out of the Looking Glass on this one.
Before anyone looks at this, it seems I do still have myself backwards.
I'm sure once I put my pants on front-wise I'll be out of the Looking Glass on this one.
Please Log in or Create an account to join the conversation.
- Vector
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 112
- Thank you received: 27
21 Feb 2025 06:30 #322172
by Vector
Replied by Vector on topic Red Machine Outline is backwards in Y dimension
Argh!
Before anyone looks at this, it seems I do still have myself backwards.
I'm sure once I put my pants on front-wise I'll be out of the Looking Glass on this one.
Before anyone looks at this, it seems I do still have myself backwards.
I'm sure once I put my pants on front-wise I'll be out of the Looking Glass on this one.
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4753
- Thank you received: 2134
21 Feb 2025 06:30 #322173
by Aciera
Replied by Aciera on topic Red Machine Outline is backwards in Y dimension
This indicates a wrong machine setup. when you jog in the positive Y direction does the tool move toward the back of the table (on the real machine not the screen)?when I set it without the -Y, movement in the display is mirrored in Y
In this case your Y-axis and joint limits should be:My Y home sensor is in the back,
MIN_LIMIT = -300.0
MAX_LIMIT = 0.0
The following user(s) said Thank You: Vector
Please Log in or Create an account to join the conversation.
- Vector
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 112
- Thank you received: 27
21 Feb 2025 08:55 #322179
by Vector
Replied by Vector on topic Red Machine Outline is backwards in Y dimension
OK, alright, for anyone who finds this, and has the same cognitive block I did, here's my answer and hopefully it helps you.
Right hand rule: (as Rob has pointed out many times), um rules: so...
Top of Machine is low negative, and gets more negative as you go down.
Left of machine is zero, and gets more positive as you go right
Back of machine is High Positive, and gets more negative as you come forward (this was my Y axis and my first sticking point)
Depending on wiring and screw shafts and belts and whatever, you have to determine which way to move your axis so that it obeys that convention.
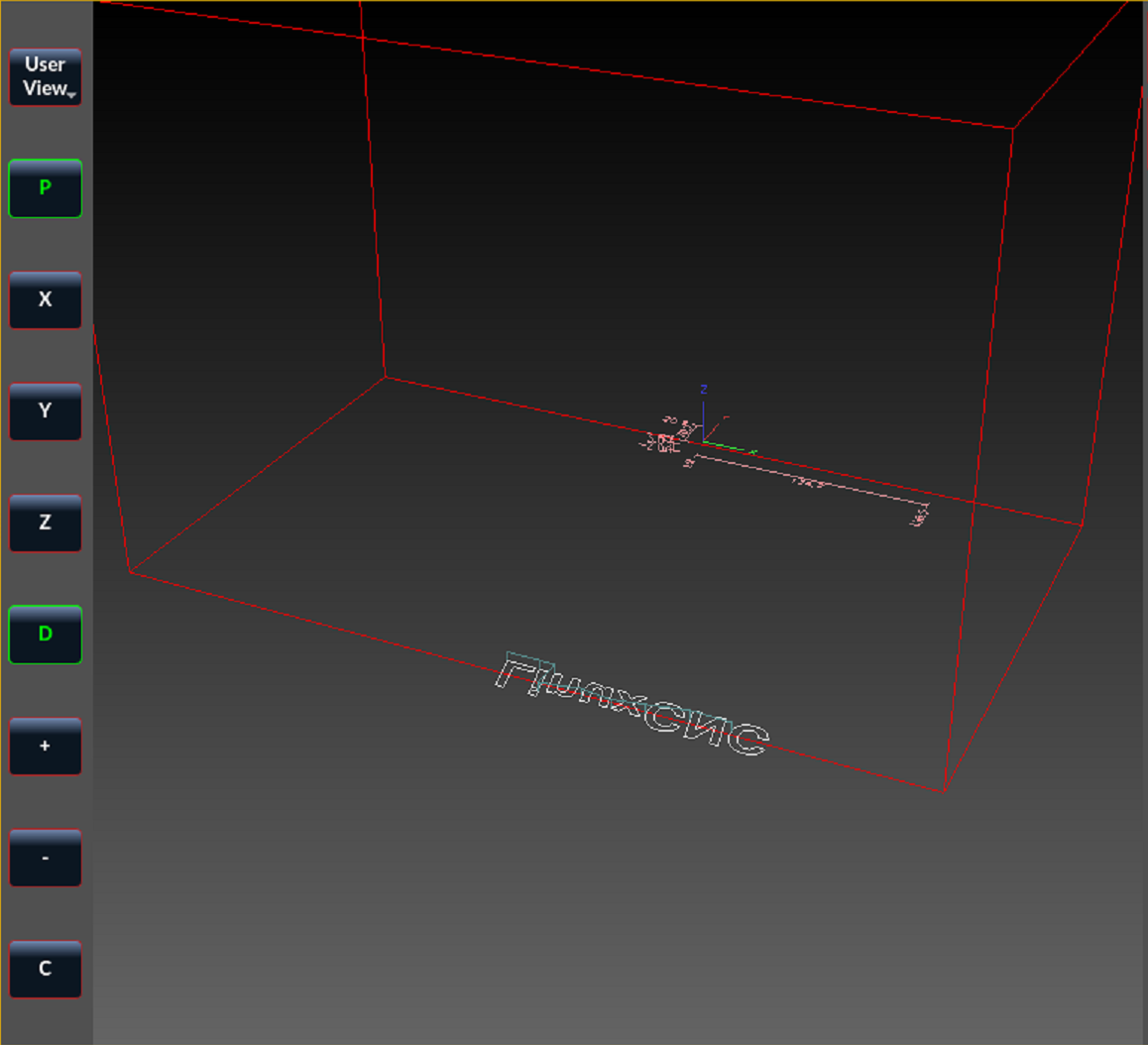
A test with writing will help, since it will be mirrored in some direction if you have your motors going the wrong way.
See: ~/linuxcnc/nc_files/examples/3dtest.ngc and /usr/share/axis/images/axis.ngc
To reverse a motor/axis (I needed to do this to get myself right: I was 'writing' the logo mirror-backwards in Y) the easiest thing is to go to your .ini file, to the [JOINT_n] for your axis, and reverse the sign on STEP_SCALE. (There are other ways, reversing wiring, etc, but this worked for me and is easy to undo and all my wiring was otherwise identical, so I preferred a software solution.)
Then you need to worry about homing. If you had it working before (as I did) then you'll need to reverse the signs on HOME_SEARCH_VEL and HOME_LATCH_VEL (Mine went from positive to negative).
Finally, and this is the one that bent me a bit. (And I see Aciera has jumped in to help me while I'm writing this, and I thank him very much, but I don't think the answer is quite right for me... I tried that and it wasn't very good.)
You have to make sure you're honoring the right-hand-rule, which means whereever your sensor is that trips to signal your axis has reached it during homeing, should be numbered accordingly.
The part I had to wrap my brain around was that in my case, this means it's:
I was trying all kinds of HOME_OFFSET settings waaay too close to zero.
Now my machine red lines are correct, and loaded files show inside the machine, and all the axes move the way they're supposed to.
It even 'air carves' LinuxCNC as pretty as can be.
Thank you thank you Aciera!
Cheers everyone!
Right hand rule: (as Rob has pointed out many times), um rules: so...
Top of Machine is low negative, and gets more negative as you go down.
Left of machine is zero, and gets more positive as you go right
Back of machine is High Positive, and gets more negative as you come forward (this was my Y axis and my first sticking point)
Depending on wiring and screw shafts and belts and whatever, you have to determine which way to move your axis so that it obeys that convention.
A test with writing will help, since it will be mirrored in some direction if you have your motors going the wrong way.
See: ~/linuxcnc/nc_files/examples/3dtest.ngc and /usr/share/axis/images/axis.ngc
To reverse a motor/axis (I needed to do this to get myself right: I was 'writing' the logo mirror-backwards in Y) the easiest thing is to go to your .ini file, to the [JOINT_n] for your axis, and reverse the sign on STEP_SCALE. (There are other ways, reversing wiring, etc, but this worked for me and is easy to undo and all my wiring was otherwise identical, so I preferred a software solution.)
Then you need to worry about homing. If you had it working before (as I did) then you'll need to reverse the signs on HOME_SEARCH_VEL and HOME_LATCH_VEL (Mine went from positive to negative).
Finally, and this is the one that bent me a bit. (And I see Aciera has jumped in to help me while I'm writing this, and I thank him very much, but I don't think the answer is quite right for me... I tried that and it wasn't very good.)
You have to make sure you're honoring the right-hand-rule, which means whereever your sensor is that trips to signal your axis has reached it during homeing, should be numbered accordingly.
The part I had to wrap my brain around was that in my case, this means it's:
HOME_OFFSET = 300
HOME = 290
MIN_LIMIT=0
MAX_LIMIT=300I was trying all kinds of HOME_OFFSET settings waaay too close to zero.
Now my machine red lines are correct, and loaded files show inside the machine, and all the axes move the way they're supposed to.
It even 'air carves' LinuxCNC as pretty as can be.
Thank you thank you Aciera!
Cheers everyone!
Please Log in or Create an account to join the conversation.
- Vector
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 112
- Thank you received: 27
21 Feb 2025 09:00 #322180
by Vector
Replied by Vector on topic Red Machine Outline is backwards in Y dimension
Oh, and also, the GEOMETRY = XYZBC, no need for that -Y.
Please Log in or Create an account to join the conversation.
- rodw
-

- Offline
- Platinum Member
-

Less
More
- Posts: 12021
- Thank you received: 4098
21 Feb 2025 11:16 #322194
by rodw
Replied by rodw on topic Red Machine Outline is backwards in Y dimension
Really think of the X,Y graphs you drew at school. You can choose any quadrant but its much easier playing in the positive quandrant which places 0,0 at the bottom left and you play in the top right quandrant (Travel +X,+Y). It's easier to have home sensors near 0,0 but I do have a machine that was easier to put the y home sensor at max Y so I have a very long home_offset to move it back to the 0,0 position. I have thought of changing the setup so I work in the bottom right quadrant so 0,0 is at top left close to the home switch. (travel would be +X, -Y) You never work in raw coordinates as you touch off your g54 offset so 0,0 is somewhere on your workpiece. If you touched off at bottom left of your workpiece, you would be working on the workpiece in that positive quandrant again. Sometimes you would touch off in the centre of your workpiece to bore a hole or make a motor mount, Sometimes you might also touch off at the back left against the corner of your vice jaws if you had a few parts to make. (travel +X, -Y). If I do this, I have a big magnet I stick on the jaws so I have a repeatable position.
The following user(s) said Thank You: Vector
Please Log in or Create an account to join the conversation.
Moderators: cmorley
Time to create page: 0.127 seconds