Kinematics - Help Our HackerSapce
- bdring
- Offline
- New Member
-

Less
More
- Posts: 1
- Thank you received: 0
21 Jun 2013 22:53 #35890
by bdring
Kinematics - Help Our HackerSapce was created by bdring
Hi,
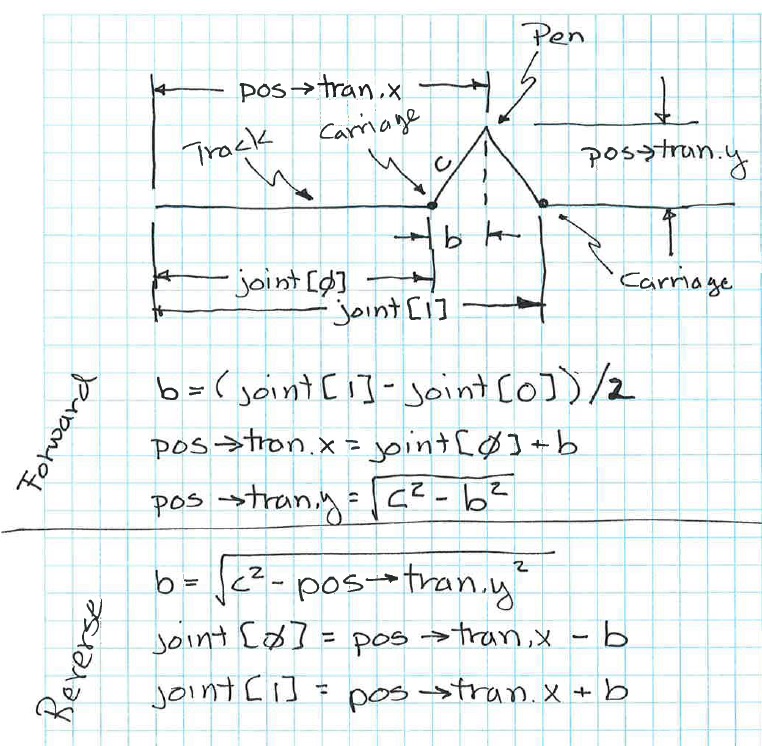
I am working with a group of CNC builders at the Chicago HackerSpace Pumping Station One. We are building a "simple" 2D drawing machine. The machine uses 2 belt driven carriages on a single linear bearing. The math is pretty simple and is attached. Believe it or not, we actually got the machine drawing in Mach3 using the "functions" feature.
pumpingstationone.org/2013/06/cnc-gonzo-build-2-recap/
We are having trouble getting it to work in EMC2. When we turn on the machine in EMC, both carriages immediately race at full speed towards the home switches. They trigger the switches, but keep trying to go. We looked at the switches in HalScope and they appear to be functioning properly. If we use F2 to quickly turn the machine on then off before the carriages crash, we can turn it back on and the carriages do not move spontaneously anymore.
Using the MDI tab with G code commands we are able to get X motion at the pen. That is pretty simple because for X, both carriages always run at the same speed and direction as the pen. We can command the pen to move in Y, but only at very low speeds. If we try to go fast EMC gives us all sorts of joint speed and position errors.
Atached is our current kinemantics file (We just modified trivkins.c). At this point I think it has been hacked beyond our initial successes, to completely broken.
1. For this type of machine, what do we return for kinematicsType()?
2. What do I want to do in kinematicsHome(). When is this function called and how often?
3. Why does the machine starting running immediately.?
4. Can everything be done in the mykin.c file or do I need to modify other areas of the HAL.
I am working with a group of CNC builders at the Chicago HackerSpace Pumping Station One. We are building a "simple" 2D drawing machine. The machine uses 2 belt driven carriages on a single linear bearing. The math is pretty simple and is attached. Believe it or not, we actually got the machine drawing in Mach3 using the "functions" feature.
pumpingstationone.org/2013/06/cnc-gonzo-build-2-recap/
We are having trouble getting it to work in EMC2. When we turn on the machine in EMC, both carriages immediately race at full speed towards the home switches. They trigger the switches, but keep trying to go. We looked at the switches in HalScope and they appear to be functioning properly. If we use F2 to quickly turn the machine on then off before the carriages crash, we can turn it back on and the carriages do not move spontaneously anymore.
Using the MDI tab with G code commands we are able to get X motion at the pen. That is pretty simple because for X, both carriages always run at the same speed and direction as the pen. We can command the pen to move in Y, but only at very low speeds. If we try to go fast EMC gives us all sorts of joint speed and position errors.
Atached is our current kinemantics file (We just modified trivkins.c). At this point I think it has been hacked beyond our initial successes, to completely broken.
1. For this type of machine, what do we return for kinematicsType()?
2. What do I want to do in kinematicsHome(). When is this function called and how often?
3. Why does the machine starting running immediately.?
4. Can everything be done in the mykin.c file or do I need to modify other areas of the HAL.
Please Log in or Create an account to join the conversation.
- cmorley
- Offline
- Moderator
-

Less
More
- Posts: 7959
- Thank you received: 2162
23 Jun 2013 02:51 #35928
by cmorley
Replied by cmorley on topic Kinematics - Help Our HackerSapce
This is something you should bring up in IRC or the maillist. Most of the developers you'll will want looking at this, hang out there.
Chris M
Chris M
Please Log in or Create an account to join the conversation.
- blank
- Offline
- New Member
-
Less
More
- Posts: 1
- Thank you received: 0
20 Jul 2013 08:47 #36817
by blank
Replied by blank on topic Kinematics - Help Our HackerSapce
Are there any books that take you through step by step?
Please Log in or Create an account to join the conversation.
Time to create page: 0.070 seconds