Manipulator Robot IRB6-S2 Simulation - pre
- jstoquica
-
 Topic Author
Topic Author
- Offline
- Premium Member
-

Less
More
- Posts: 117
- Thank you received: 8
01 Dec 2015 00:23 #66141
by jstoquica
Manipulator Robot IRB6-S2 Simulation - pre was created by jstoquica
Hi Everyone,
Finally I can share with you the partial results of the manipulator robot simulation. Attach the files and some pics.
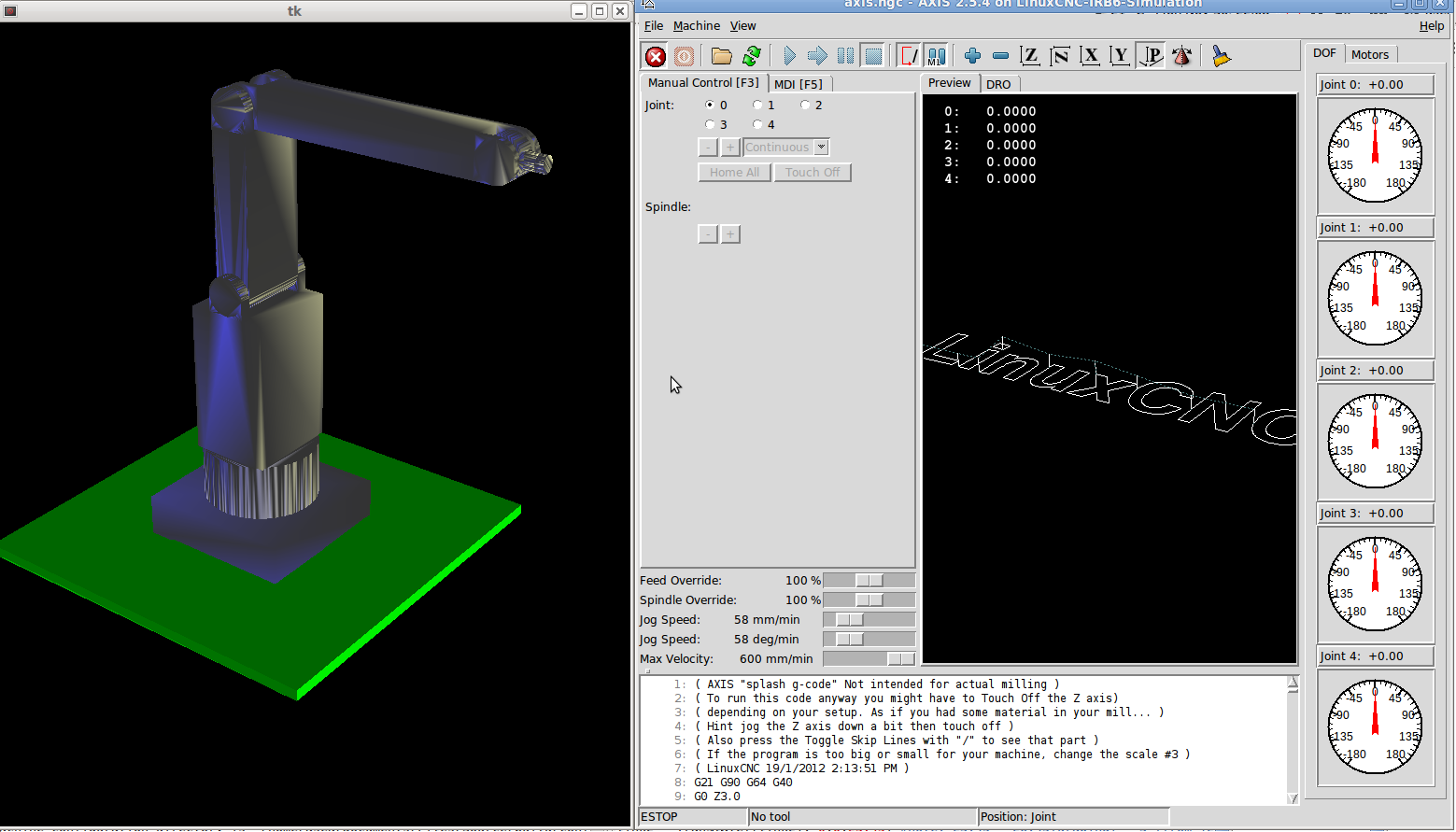
Basically, I use pumakins.c and modify the kinematics equations. When the real robot will be operating I'll do a detailed documentation for new and actual developers with manipulator robots interests.
I am still some bugs to revise, like:
- I don't know how set "world coordinates", I have error in the Inverse Kinematics function because doesn't has initial values. Something in the modified code from pumakins are generating it....... In the original puma configs didn't happen it.
Any suggestion or questions I will be attentive. Regards.
Finally I can share with you the partial results of the manipulator robot simulation. Attach the files and some pics.
Basically, I use pumakins.c and modify the kinematics equations. When the real robot will be operating I'll do a detailed documentation for new and actual developers with manipulator robots interests.
I am still some bugs to revise, like:
- I don't know how set "world coordinates", I have error in the Inverse Kinematics function because doesn't has initial values. Something in the modified code from pumakins are generating it....... In the original puma configs didn't happen it.
Any suggestion or questions I will be attentive. Regards.
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19875
- Thank you received: 4642
01 Dec 2015 00:40 #66145
by andypugh
Can you try re-phrasing that, I am not clear what your problem is.
Replied by andypugh on topic Manipulator Robot IRB6-S2 Simulation - pre
- I don't know how set "world coordinates", I have error in the Inverse Kinematics function because doesn't has initial values. Something in the modified code from pumakins are generating it....... In the original puma configs didn't happen it..
Can you try re-phrasing that, I am not clear what your problem is.
The following user(s) said Thank You: jstoquica
Please Log in or Create an account to join the conversation.
- jstoquica
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 117
- Thank you received: 8
01 Dec 2015 01:38 #66149
by jstoquica
Replied by jstoquica on topic Manipulator Robot IRB6-S2 Simulation - pre
Good Night, and Thanks for the reply.
I will try to explain better:
1. Run LinuxCNC with my conf:
linuxcnc linuxcnc/configs/irb/irb.ini
2. "Toggle emergency stop and Machine power". Here is everything normal.
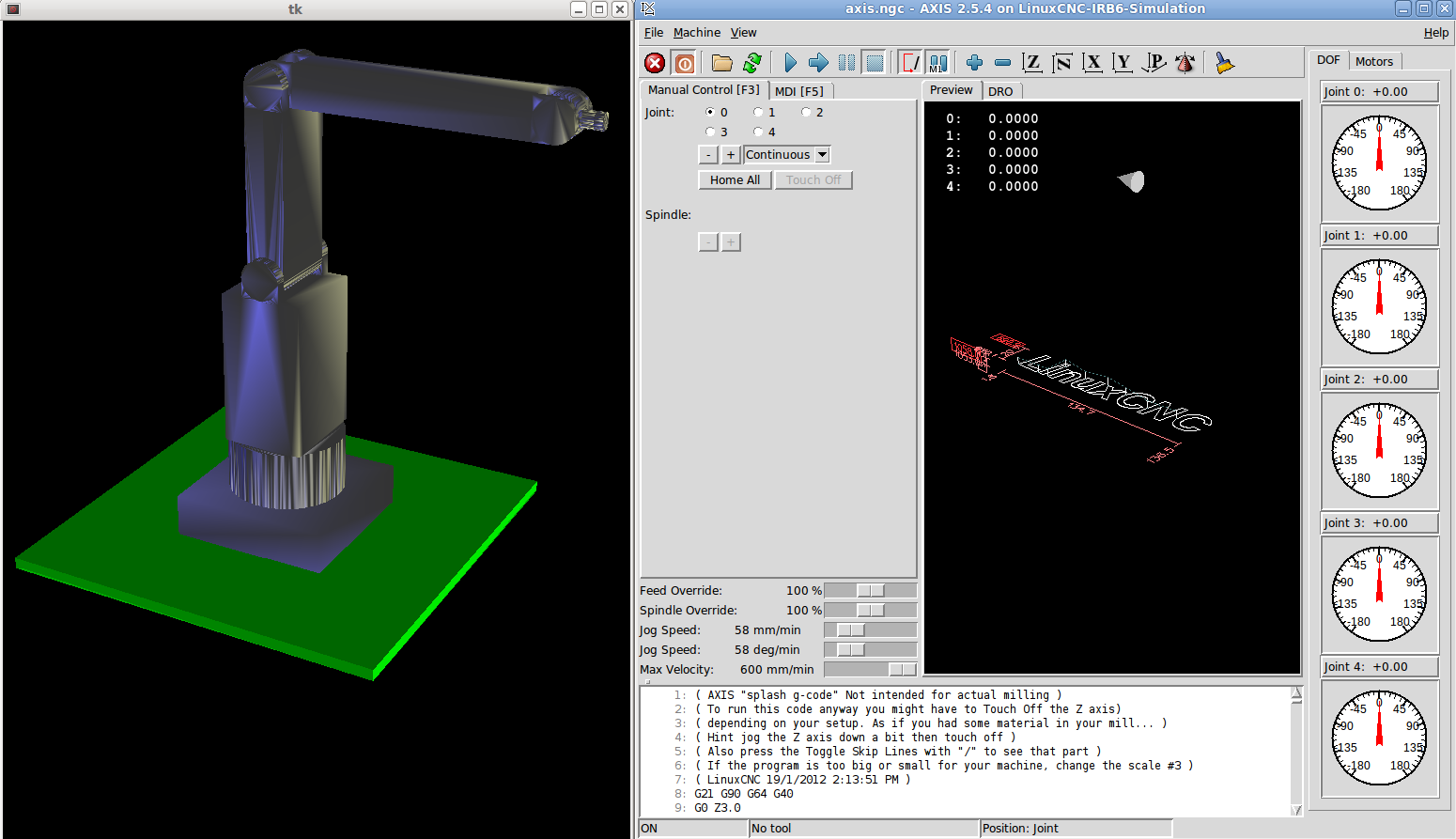
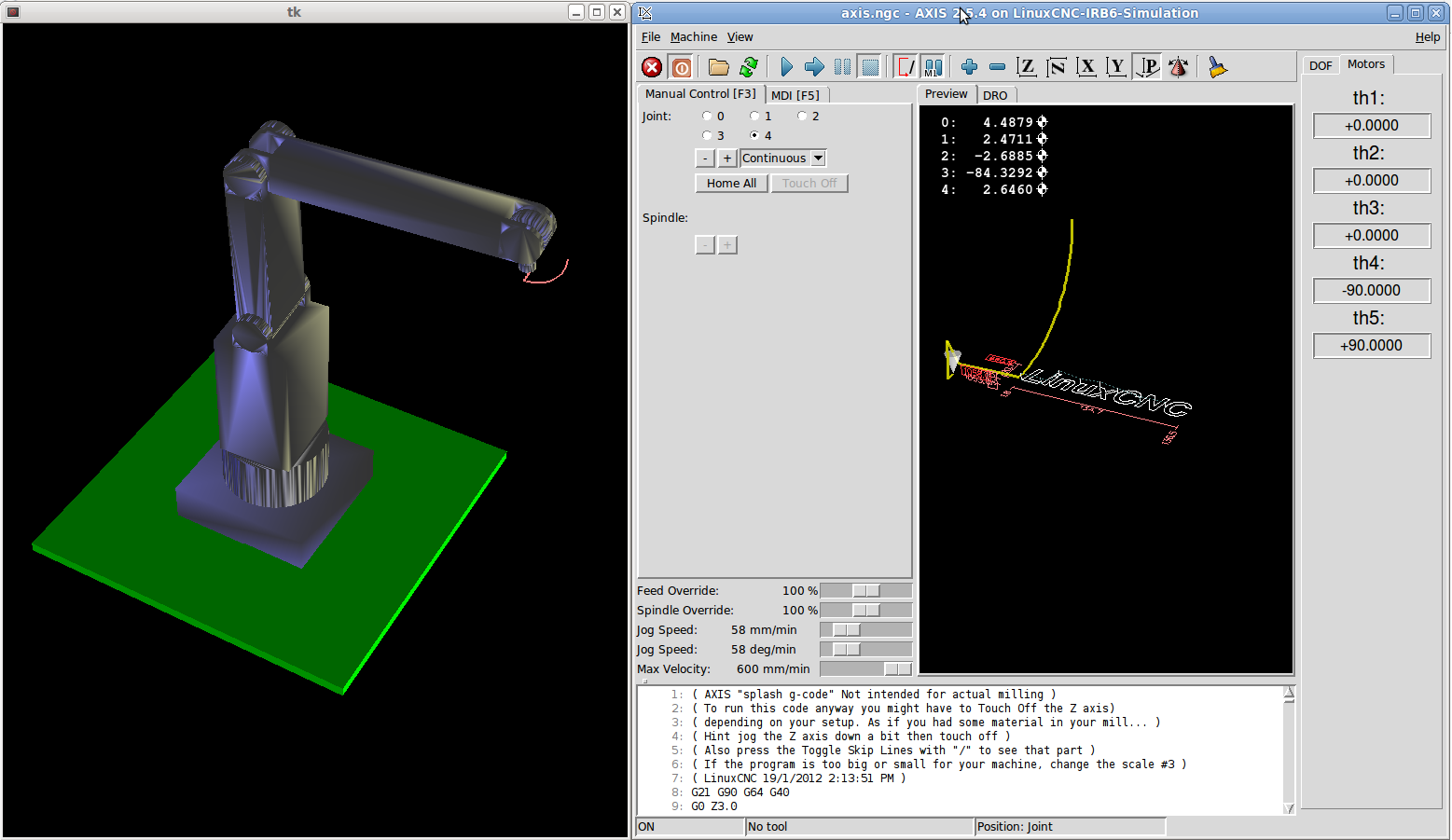
3. If I try to go at "MDI mode", my config generates error (puma560 and puma configs didn't happen it)
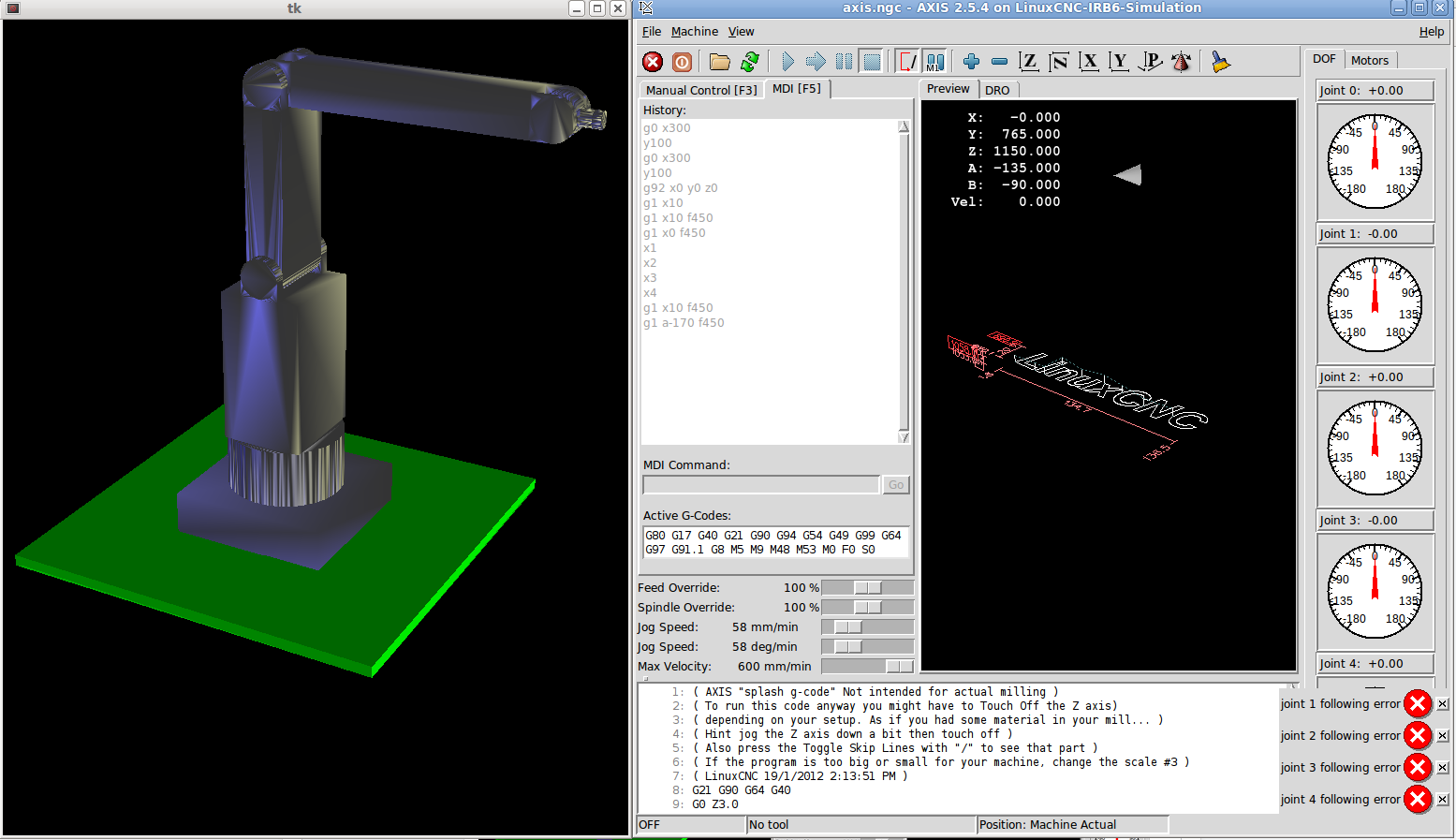
4. I have to push "Home all" in "manual mode", after that I can toggle to "MDI mode":
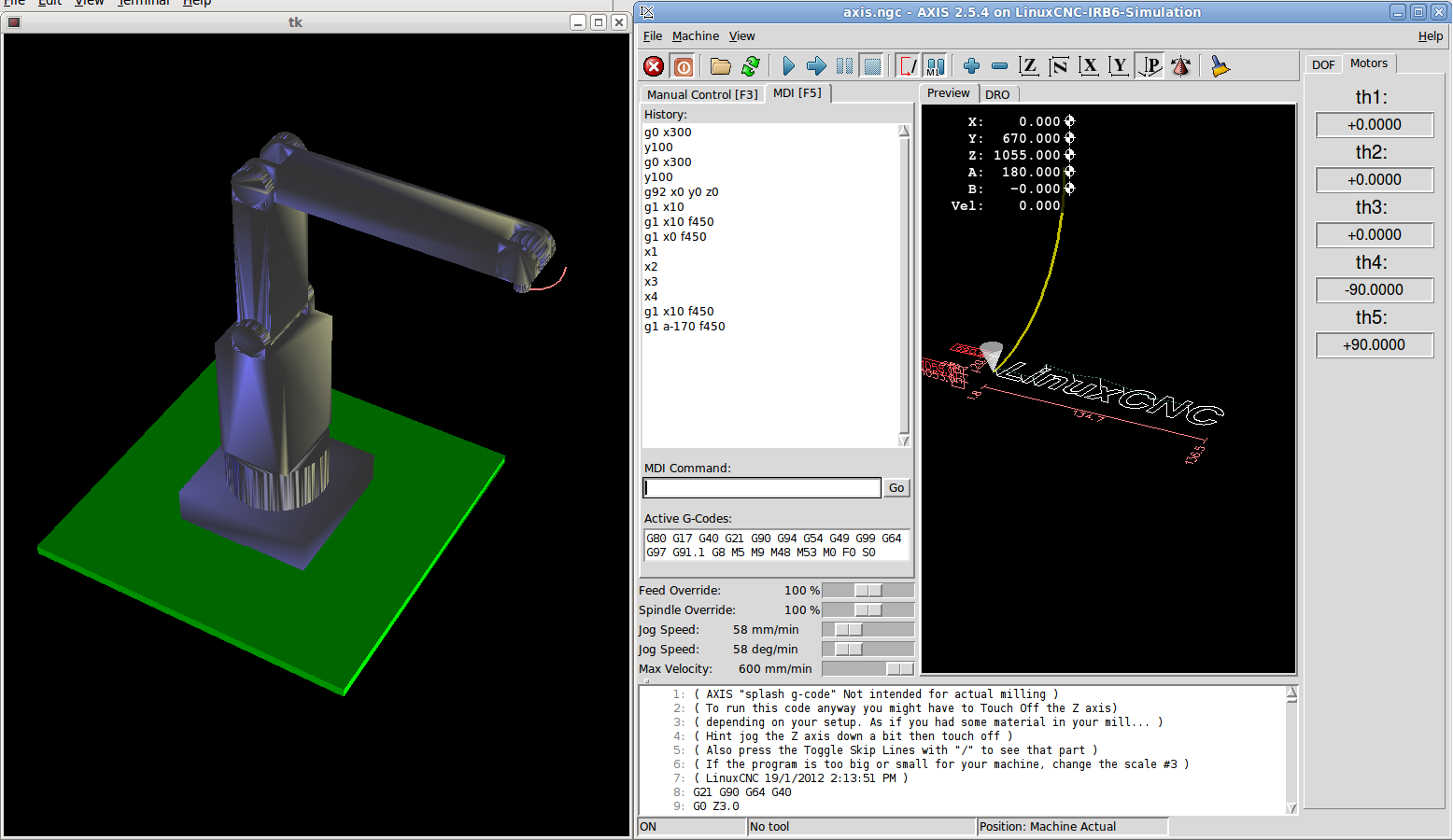
and the hal variables tha I created in the inverse_kinematics_function had been updated, but only in "MDI mode"
forum.linuxcnc.org/forum/10-advanced-con...tics-values?start=30
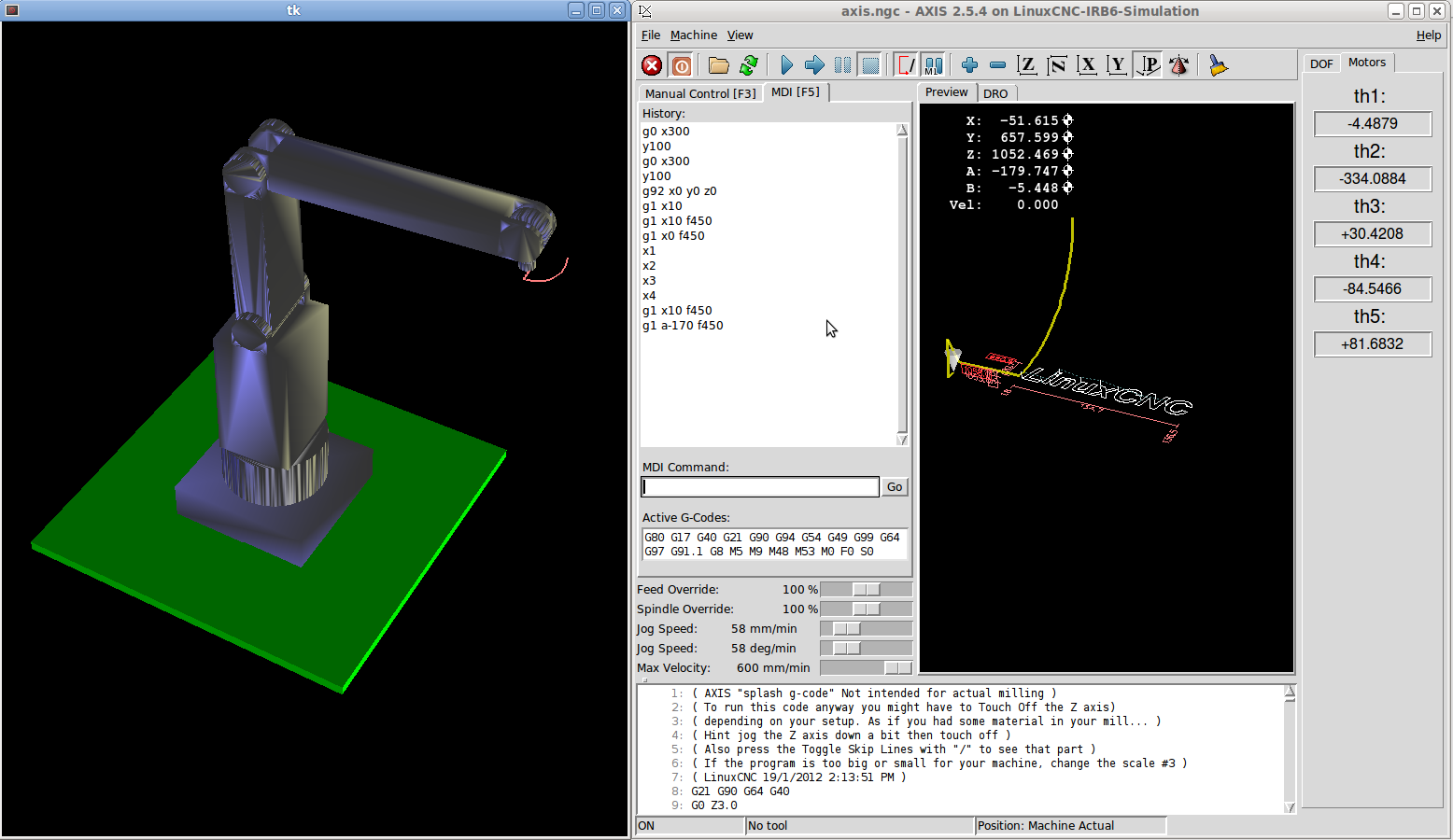
Only in MDI mode (World coordinates), the inverse kinematics function has updated values.
5. It's something happen with the inverse kinematics function, the flags or in the kinematicsHome() function... I modified something or I have to add something for a desired response. I have to fix it before run with the real robot and avoid some wrong behavior.
Thanks for the contributions, I want to improve the open architecture concept to control manipulator robots.
I will try to explain better:
1. Run LinuxCNC with my conf:
linuxcnc linuxcnc/configs/irb/irb.ini
2. "Toggle emergency stop and Machine power". Here is everything normal.
3. If I try to go at "MDI mode", my config generates error (puma560 and puma configs didn't happen it)
4. I have to push "Home all" in "manual mode", after that I can toggle to "MDI mode":
and the hal variables tha I created in the inverse_kinematics_function had been updated, but only in "MDI mode"
forum.linuxcnc.org/forum/10-advanced-con...tics-values?start=30
Only in MDI mode (World coordinates), the inverse kinematics function has updated values.
5. It's something happen with the inverse kinematics function, the flags or in the kinematicsHome() function... I modified something or I have to add something for a desired response. I have to fix it before run with the real robot and avoid some wrong behavior.
Thanks for the contributions, I want to improve the open architecture concept to control manipulator robots.
The following user(s) said Thank You: Zazakas
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19875
- Thank you received: 4642
01 Dec 2015 11:23 #66158
by andypugh
I think this is normal. In "Joint Mode" the kinematics are not used. The Kinematics are only used in World Mode.
Homing nontrivial kinematics is not something I know much about.
Replied by andypugh on topic Manipulator Robot IRB6-S2 Simulation - pre
Only in MDI mode (World coordinates), the inverse kinematics function has updated values.
I think this is normal. In "Joint Mode" the kinematics are not used. The Kinematics are only used in World Mode.
Homing nontrivial kinematics is not something I know much about.
The following user(s) said Thank You: jstoquica
Please Log in or Create an account to join the conversation.
- jstoquica
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 117
- Thank you received: 8
11 Dec 2015 11:28 #66801
by jstoquica
Replied by jstoquica on topic Manipulator Robot IRB6-S2 Simulation - pre
Thanks Andy for the reply,
But with other manipulators robots like Puma or Puma 560 don´t happen these issue. Can you open my conf attached files?
Could It be anything with the *.INI "home" config parameters?
Other question:
How can I print the "non real time variables" of the executable kinematics file int plaint text output file(e.g. pumakins or genserkins)?
Thanks.
But with other manipulators robots like Puma or Puma 560 don´t happen these issue. Can you open my conf attached files?
Could It be anything with the *.INI "home" config parameters?
Other question:
How can I print the "non real time variables" of the executable kinematics file int plaint text output file(e.g. pumakins or genserkins)?
Thanks.
Please Log in or Create an account to join the conversation.
- robottom
- Offline
- Senior Member
-

Less
More
- Posts: 53
- Thank you received: 4
24 Dec 2015 21:51 #67302
by robottom
Replied by robottom on topic Manipulator Robot IRB6-S2 Simulation - pre
Hi,
sounds very interesting. I assume that you are owning an IRB6 to connect to Linuxcnc. I currently running a Puma 560 with linuxcnc but in addition looking for a IRB 6. I guess it has a higher reach than the Puma 560 (max 890mm).
Would be nice to hear from you when you are ready to run the real machine.
Thomas
sounds very interesting. I assume that you are owning an IRB6 to connect to Linuxcnc. I currently running a Puma 560 with linuxcnc but in addition looking for a IRB 6. I guess it has a higher reach than the Puma 560 (max 890mm).
Would be nice to hear from you when you are ready to run the real machine.
Thomas
Please Log in or Create an account to join the conversation.
- jstoquica
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 117
- Thank you received: 8
28 Feb 2016 14:13 #70748
by jstoquica
Replied by jstoquica on topic Manipulator Robot IRB6-S2 Simulation - pre
HI robottom,
It's good to know that you and other people work with manipulators, through linuxcnc.
Here something of my work. plus.google.com/u/0/b/116960304375198732...16960304375198732734
Actually I am assembling the motors on the robot, to test and control with linuxcnc. After that, the robot will be ready to work, with the open architecture controller. I have to update the post and I am going to write a manual with my experience and share with linuxcnc community. I wait you do something similar, or in the future if you can verify the content of my document.
It's good to know that you and other people work with manipulators, through linuxcnc.
Here something of my work. plus.google.com/u/0/b/116960304375198732...16960304375198732734
Actually I am assembling the motors on the robot, to test and control with linuxcnc. After that, the robot will be ready to work, with the open architecture controller. I have to update the post and I am going to write a manual with my experience and share with linuxcnc community. I wait you do something similar, or in the future if you can verify the content of my document.
Please Log in or Create an account to join the conversation.
- robottom
- Offline
- Senior Member
-
Less
More
- Posts: 53
- Thank you received: 4
29 Feb 2016 07:00 #70797
by robottom
Replied by robottom on topic Manipulator Robot IRB6-S2 Simulation - pre
Hi jstoquica,
looks very interesting.
You said: "...robot will be ready to work, with the open architecture controller."
Right, that's were I'm currently need to take the next step. The current setup with "standard"-linuxcnc using the AXIS gui is pretty well equiped to run a gcode but is currently not a "normal" robot control system. Basically I want to stick to AXIS or one of the other GUIs but want to extend the control flow with own logic. One example would be: run the gcode to walk along a certain 3D surface but take in between pieces of a certain size (move away from the surface to a table to pick a piece) and put it into the surface (into a 3D model).
I have a linuxcnc setup with compile capabilities to change/extend the code but I need to find out where I have to interrupt the code/control flow to get the "pick up a new piece". Do you have any idea on that?
looks very interesting.
You said: "...robot will be ready to work, with the open architecture controller."
Right, that's were I'm currently need to take the next step. The current setup with "standard"-linuxcnc using the AXIS gui is pretty well equiped to run a gcode but is currently not a "normal" robot control system. Basically I want to stick to AXIS or one of the other GUIs but want to extend the control flow with own logic. One example would be: run the gcode to walk along a certain 3D surface but take in between pieces of a certain size (move away from the surface to a table to pick a piece) and put it into the surface (into a 3D model).
I have a linuxcnc setup with compile capabilities to change/extend the code but I need to find out where I have to interrupt the code/control flow to get the "pick up a new piece". Do you have any idea on that?
Please Log in or Create an account to join the conversation.
- jstoquica
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 117
- Thank you received: 8
22 Mar 2016 15:33 - 20 Apr 2016 19:14 #72034
by jstoquica
Replied by jstoquica on topic Manipulator Robot IRB6-S2 Simulation - pre
Hi everyone,
Let's see the initial tests for the robot.
Regards.
Let's see the initial tests for the robot.
Regards.
Last edit: 20 Apr 2016 19:14 by jstoquica.
Please Log in or Create an account to join the conversation.
- jstoquica
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 117
- Thank you received: 8
22 Mar 2016 16:00 #72037
by jstoquica
Replied by jstoquica on topic Manipulator Robot IRB6-S2 Simulation - pre
Hi robottom,
The simulation was made with python. The easiest way is edit and understand the opengl code. I used a Puma560 sim to edit and generate my own simulation.
The simulation was made with python. The easiest way is edit and understand the opengl code. I used a Puma560 sim to edit and generate my own simulation.
Please Log in or Create an account to join the conversation.
Time to create page: 0.382 seconds