coaxial axes / offset comp how to
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19876
- Thank you received: 4642
12 Dec 2015 16:06 #66874
by andypugh
Replied by andypugh on topic coaxial axes
I still don't know what you are trying to do.
Is the situation that you have two 180 degree actuators and want 360 degrees of motion, or is it something more complex than that?
You could consider simply setting the encoder scale so that the PID components think that each axis has moved twice as far as it actually has. Then have two PID, both connected to the A-axis position command.
Is the situation that you have two 180 degree actuators and want 360 degrees of motion, or is it something more complex than that?
You could consider simply setting the encoder scale so that the PID components think that each axis has moved twice as far as it actually has. Then have two PID, both connected to the A-axis position command.
Please Log in or Create an account to join the conversation.
- bkt
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 1111
- Thank you received: 114
12 Dec 2015 19:30 - 12 Dec 2015 19:38 #66884
by bkt
Replied by bkt on topic coaxial axes
the offset comp is +/- as i need... i think possible to do that in hal usig sum+gain(-1) .... but simply i have not clear the relationship of the signal (encoder-pos, encder.veocity, joint-cmp-pos, oint.os-fb,pid ec etc...) ....
The mechanical .... 2 shaft, every one is an axes. one rotate the end effector 360° around x plave, the second one rotate the end effector of 180° around Z plane. The hollow shaft A axes is external shaft, the normal shaft and inside to A axes is B axes. when rotate A and B is stopped, the end effector rotare around X and Z plane too. To avoid this I must rotate both at the same speed and position. So B axes is stopped in relation to A axes.
A very bad draw (real sorry) of mechanical schemas ...note the pulley reduction and motor is the same for axes A and B.
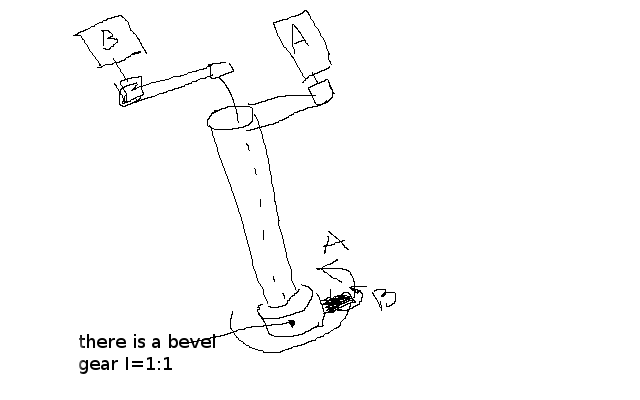
The mechanical .... 2 shaft, every one is an axes. one rotate the end effector 360° around x plave, the second one rotate the end effector of 180° around Z plane. The hollow shaft A axes is external shaft, the normal shaft and inside to A axes is B axes. when rotate A and B is stopped, the end effector rotare around X and Z plane too. To avoid this I must rotate both at the same speed and position. So B axes is stopped in relation to A axes.
A very bad draw (real sorry) of mechanical schemas ...note the pulley reduction and motor is the same for axes A and B.
Last edit: 12 Dec 2015 19:38 by bkt.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19876
- Thank you received: 4642
12 Dec 2015 22:59 #66898
by andypugh
So, the A-position is an offset to the B-position.
A-motor-position-cmd -> pid.A.command and B.offset.offset
A-encoder -> pid.A.feedback and axis.A.feedback
B-motor-position -> B.offset -> B.pid
B-encoder -> B.pid and B.offset.feedback
B.offset.feedback -> axis.B.feedback
Replied by andypugh on topic coaxial axes
Even that picture is worth 1000 words.A very bad draw (real sorry) of mechanical schemas
So, the A-position is an offset to the B-position.
A-motor-position-cmd -> pid.A.command and B.offset.offset
A-encoder -> pid.A.feedback and axis.A.feedback
B-motor-position -> B.offset -> B.pid
B-encoder -> B.pid and B.offset.feedback
B.offset.feedback -> axis.B.feedback
The following user(s) said Thank You: bkt
Please Log in or Create an account to join the conversation.
- bkt
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1111
- Thank you received: 114
13 Dec 2015 18:24 #66926
by bkt
thanks a lot .... this " code " I clarified many things ... thanks again
Regards
Giorgio
Replied by bkt on topic coaxial axes
A-motor-position-cmd -> pid.A.command and B.offset.offset
A-encoder -> pid.A.feedback and axis.A.feedback
B-motor-position -> B.offset -> B.pid
B-encoder -> B.pid and B.offset.feedback
B.offset.feedback -> axis.B.feedback
thanks a lot .... this " code " I clarified many things ... thanks again
Regards
Giorgio
Please Log in or Create an account to join the conversation.
- bkt
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1111
- Thank you received: 114
10 Jan 2016 05:38 #68147
by bkt
Replied by bkt on topic coaxial axes
for anyone who had difficulty understanding offset.9 component and use with feedback signals and command, similar to what happened to me ...
The following user(s) said Thank You: Beezerlm
Please Log in or Create an account to join the conversation.
Time to create page: 0.113 seconds