Orientation Error when homing Robotic Arm
- jstoquica
-
 Topic Author
Topic Author
- Offline
- Premium Member
-

Less
More
- Posts: 117
- Thank you received: 8
20 May 2016 15:26 #74886
by jstoquica
Orientation Error when homing Robotic Arm was created by jstoquica
Hi everyone,
I have a issue with my homing configuration and the orientation of my robot.
I have a 5 DOF industrial robotic arm, I set the ini file to home all joints, but when I want to run any G program, the orientation of axis Z is wrong (same axis of the robot base). You can see the picture...
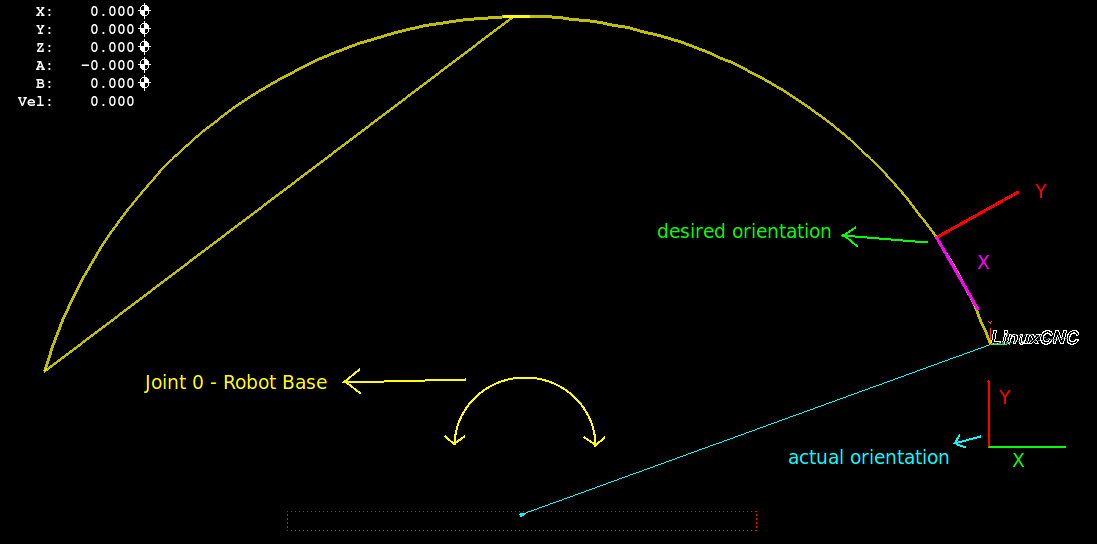
The joint 0 angle home in the ini file is 70°, and this is the offset that generates the issue........
How can I offset that? or Are there another solution?
Thanks a lot.
I have a issue with my homing configuration and the orientation of my robot.
I have a 5 DOF industrial robotic arm, I set the ini file to home all joints, but when I want to run any G program, the orientation of axis Z is wrong (same axis of the robot base). You can see the picture...
The joint 0 angle home in the ini file is 70°, and this is the offset that generates the issue........
How can I offset that? or Are there another solution?
Thanks a lot.
Please Log in or Create an account to join the conversation.
- jstoquica
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 117
- Thank you received: 8
23 May 2016 12:41 #74978
by jstoquica
Replied by jstoquica on topic Orientation Error when homing Robotic Arm
Hi everyone,
Any idea?
Thanks.
Any idea?
Thanks.
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19875
- Thank you received: 4642
24 May 2016 11:58 #75034
by andypugh
Replied by andypugh on topic Orientation Error when homing Robotic Arm
Maybe you need to set the HOME_OFFSET to -70 ?
Please Log in or Create an account to join the conversation.
Time to create page: 0.154 seconds