scarakins flip motion
- Deckerjwd
-
 Topic Author
Topic Author
- Offline
- Premium Member
-

Less
More
- Posts: 95
- Thank you received: 3
19 Aug 2016 18:22 #79089
by Deckerjwd
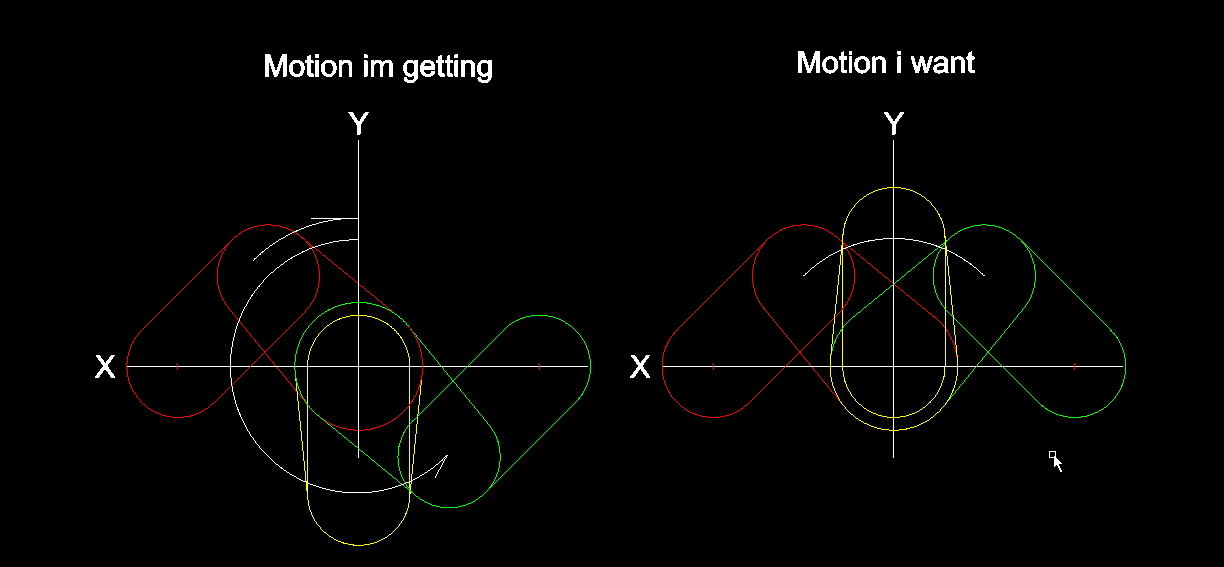
scarakins flip motion was created by Deckerjwd
playing with a scara type motion but the kins force the arm to rotate the axis_0 180deg on the crossing of the X 0 line(or Y 0). normally not a problem because your arm would hit something before this happened. so i know i need to edit the scarakins.c file then recompile, but im not sure how to change the math to let the axis_1 continue to rotate in sync with the axis_0. i have attached a pic of the arm

And a diagram of the motion
but not sure what i need to edit in the scarakins file to make that happen
And a diagram of the motion
but not sure what i need to edit in the scarakins file to make that happen
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19875
- Thank you received: 4642
21 Aug 2016 23:50 - 21 Aug 2016 23:50 #79225
by andypugh
Replied by andypugh on topic scarakins flip motion
I guess you are passing through a singularity.
It probably comes down to an inverse trigonometric function that chooses one root rather than the other.
Perhaps the scarakins code needs to reject solutions that result in a large deviation from the current position.
github.com/LinuxCNC/linuxcnc/blob/master...ics/scarakins.c#L153
It's probably something like
It probably comes down to an inverse trigonometric function that chooses one root rather than the other.
Perhaps the scarakins code needs to reject solutions that result in a large deviation from the current position.
github.com/LinuxCNC/linuxcnc/blob/master...ics/scarakins.c#L153
It's probably something like
if (absf(q0 - joint[0]) > 90){
q0 - atant2(-yt / xt);
}
Last edit: 21 Aug 2016 23:50 by andypugh.
The following user(s) said Thank You: Deckerjwd
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-
Less
More
- Posts: 21702
- Thank you received: 7417
22 Aug 2016 00:27 #79228
by tommylight
Replied by tommylight on topic scarakins flip motion
I had to deal with singularity on a KUKA KR150, it turned out that is quite normal for things with a lot of axis at times when the same move can be made by more than 1 axis.
Please Log in or Create an account to join the conversation.
- Deckerjwd
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 95
- Thank you received: 3
22 Aug 2016 19:07 #79273
by Deckerjwd
so been playing around with that, nothing promising yet. looks like it is only a problem when an axis is close to zero and the speed makes the affected radius larger. A workaround maybe to slow the feed as it gets close to X 0 or Y 0. Don't really like this idea. think it is a problem with quadrant math, still hard to get my head around.
Replied by Deckerjwd on topic scarakins flip motion
if (abs(q0 - joint[0]) > 90){
q0 - atan2(-yt, xt);}
so been playing around with that, nothing promising yet. looks like it is only a problem when an axis is close to zero and the speed makes the affected radius larger. A workaround maybe to slow the feed as it gets close to X 0 or Y 0. Don't really like this idea. think it is a problem with quadrant math, still hard to get my head around.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19875
- Thank you received: 4642
22 Aug 2016 20:36 #79278
by andypugh
Possibly because the units of q0 are radians at that point, but joint[0] is degrees.
Replied by andypugh on topic scarakins flip motion
if (abs(q0 - joint[0]) > 90){
q0 - atan2(-yt, xt);}
so been playing around with that, nothing promising yet.
Possibly because the units of q0 are radians at that point, but joint[0] is degrees.
The following user(s) said Thank You: Deckerjwd
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19875
- Thank you received: 4642
22 Aug 2016 20:39 #79279
by andypugh
Replied by andypugh on topic scarakins flip motion
You do realise that you need to recompile the kins after each change?
Please Log in or Create an account to join the conversation.
- Deckerjwd
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 95
- Thank you received: 3
26 Aug 2016 13:55 #79491
by Deckerjwd
Replied by Deckerjwd on topic scarakins flip motion
o well that makes the weird movement make sense
Jon
Jon
Please Log in or Create an account to join the conversation.
- Deckerjwd
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 95
- Thank you received: 3
26 Aug 2016 15:00 #79499
by Deckerjwd
Replied by Deckerjwd on topic scarakins flip motion
so joint[0] now moves correctly, but looks like i need to switch directions on joint[1], code changes so far are as follows line 117
and originally line 154
double a3;
double q0, q1, q2;
double xt, yt, rsq, cc;
double x, y, z, c;
/*Save the Origale q value, JWD*/
q2 = q0;and originally line 154
if (abs(q0 - q2) > 1.5708){
q0 = q0 - atan2(-yt,xt);
}
else {q0 = q0 - atan2(yt, xt);}Please Log in or Create an account to join the conversation.
- Deckerjwd
-
Topic Author
- Offline
- Premium Member
-
Less
More
- Posts: 95
- Thank you received: 3
08 Sep 2016 16:20 #80232
by Deckerjwd
Replied by Deckerjwd on topic scarakins flip motion
ok starting to think the if statement is in the wrong place or maybe the condition is incorrect.
think something like if moving to negative from positive then invert rotation. try moving the if statement but i get some feedback (cool patterns) and loose control of the arm. going to keep at it any feed back is welcome
think something like if moving to negative from positive then invert rotation. try moving the if statement but i get some feedback (cool patterns) and loose control of the arm. going to keep at it any feed back is welcome
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19875
- Thank you received: 4642
08 Sep 2016 17:39 #80237
by andypugh
Replied by andypugh on topic scarakins flip motion
You could try looking at the encoder feedback and moving the robot by hand, and pretend you are running the code, see how it works out?
Please Log in or Create an account to join the conversation.
Time to create page: 0.190 seconds