Servo tuning issues
- bevins
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 1942
- Thank you received: 338
17 Nov 2017 15:53 - 17 Nov 2017 15:55 #101939
by bevins
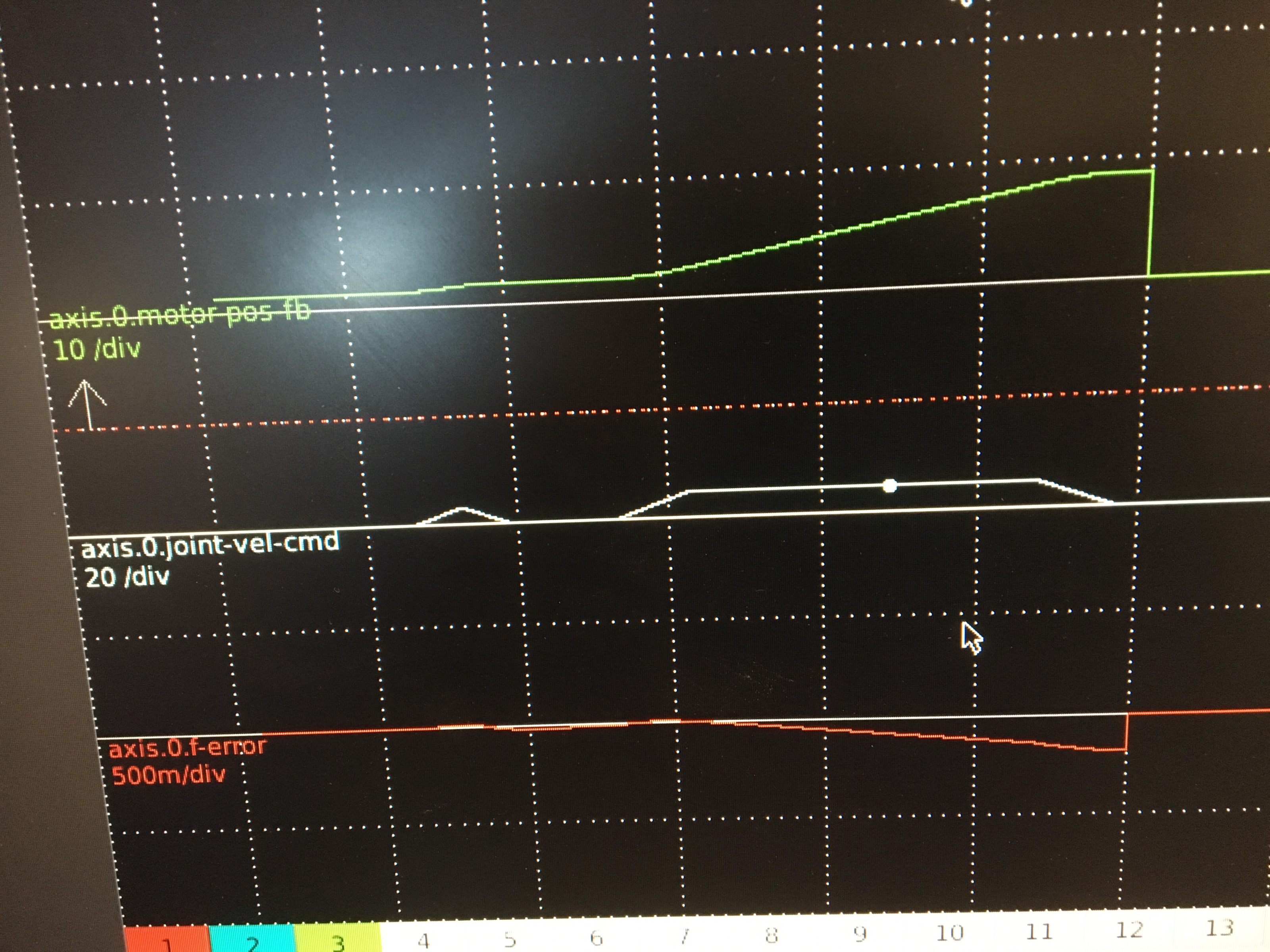
 I am having difficulty tuning these servos.
I am having difficulty tuning these servos.
Dc servos with drivers +-10v velocity
When i command move jogging as shown in pics when i stop, the acis keeps moving. Cant figure out how to get rid of it.
Servo tuning issues was created by bevins
Dc servos with drivers +-10v velocity
When i command move jogging as shown in pics when i stop, the acis keeps moving. Cant figure out how to get rid of it.
Last edit: 17 Nov 2017 15:55 by bevins.
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17958
- Thank you received: 5263
17 Nov 2017 15:56 #101940
by PCW
Replied by PCW on topic Servo tuning issues
can you post your hal and ini files?
Please Log in or Create an account to join the conversation.
- bevins
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1942
- Thank you received: 338
17 Nov 2017 16:07 #101942
by bevins
Replied by bevins on topic Servo tuning issues
Just powered up and starting tuning so the hal and ini work in progress.
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17958
- Thank you received: 5263
17 Nov 2017 16:12 #101943
by PCW
Replied by PCW on topic Servo tuning issues
as a first step, I would remove all the
setp pid.N.maxerror .0005
statements
setp pid.N.maxerror .0005
statements
The following user(s) said Thank You: bevins
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Away
- Platinum Member
-
Less
More
- Posts: 4754
- Thank you received: 1458
17 Nov 2017 16:18 #101945
by Todd Zuercher
Replied by Todd Zuercher on topic Servo tuning issues
It is a little hard to tell from just those traces.
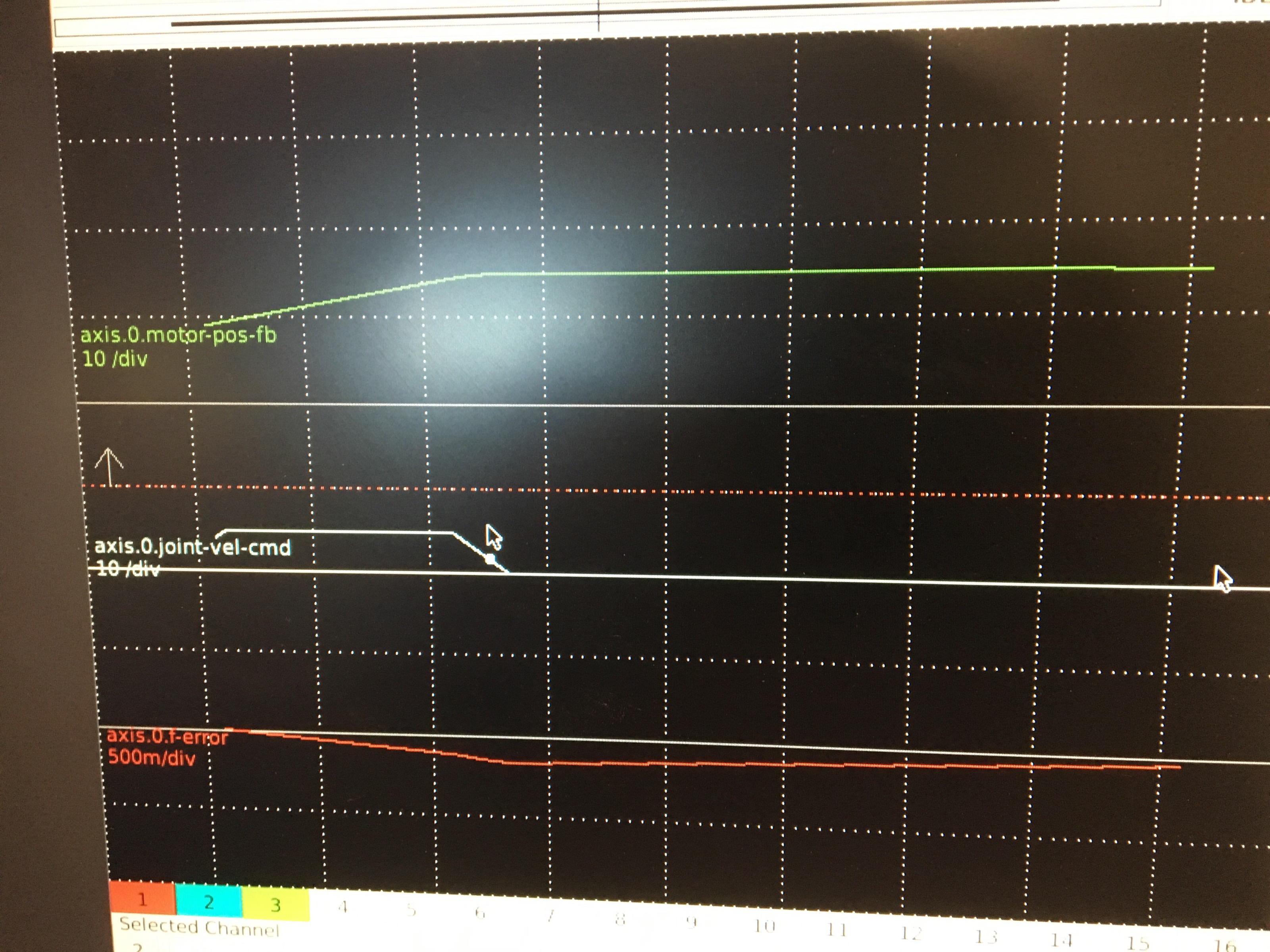
But I think it looks like you need a lot more P, It looks like you are running mostly open loop now, only relying on the feed forwards to move the machine. See how the error grows at a constant rate until the end of the move, then it slowly shrinks as the very weekly tuned PID loop slowly reels the error back in.
I like to also look at the velocity feed back, beside the velocity command trace. Place them right over top of each other so that you can easily see how closely the the velocity feedback follows the velocity command. If you are using a Mesa card the hal pin should be something like hm2_5i25.0.encoder.nn.velocity. If your encoder reader does not have a velocity feedback, (pretty sure most all do) you can get a mathematically calculated one from the PID on the pin pid.N.feedback-deriv.
But I think it looks like you need a lot more P, It looks like you are running mostly open loop now, only relying on the feed forwards to move the machine. See how the error grows at a constant rate until the end of the move, then it slowly shrinks as the very weekly tuned PID loop slowly reels the error back in.
I like to also look at the velocity feed back, beside the velocity command trace. Place them right over top of each other so that you can easily see how closely the the velocity feedback follows the velocity command. If you are using a Mesa card the hal pin should be something like hm2_5i25.0.encoder.nn.velocity. If your encoder reader does not have a velocity feedback, (pretty sure most all do) you can get a mathematically calculated one from the PID on the pin pid.N.feedback-deriv.
Please Log in or Create an account to join the conversation.
- bevins
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1942
- Thank you received: 338
17 Nov 2017 16:41 #101947
by bevins
Replied by bevins on topic Servo tuning issues
Thanks pcw, that fixed my issues, now i can tune properly.
Why is pnccof setting that parameter?
Why is pnccof setting that parameter?
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17958
- Thank you received: 5263
17 Nov 2017 17:04 #101949
by PCW
Replied by PCW on topic Servo tuning issues
It makes sense for the stepgen PID loop but not normal servos
I think this is fixed in 2.7.11 but not sure
I think this is fixed in 2.7.11 but not sure
Please Log in or Create an account to join the conversation.
- bevins
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 1942
- Thank you received: 338
18 Nov 2017 01:50 #101958
by bevins
Replied by bevins on topic Servo tuning issues
AH.... I didnt upgrade from live CD.
Thanks....
Thanks....
Please Log in or Create an account to join the conversation.
Time to create page: 0.207 seconds