- Configuring LinuxCNC
- Advanced Configuration
- Is there a guide for getting a RIP built sim based bot into a realtime build?
Is there a guide for getting a RIP built sim based bot into a realtime build?
- Wireline
-
 Topic Author
Topic Author
- Offline
- Senior Member
-

Less
More
- Posts: 67
- Thank you received: 9
12 May 2018 19:20 #110617
by Wireline
Is there a guide for getting a RIP built sim based bot into a realtime build? was created by Wireline
Hi
I am at the stage of trying to import my robot into a realtime build and having some trouble.
Is there a guide for importing from a dev / rip build to the realtime, with necessary file formats etc? For example I note that the versions of the PUMA560 ini and HAL file are very different from the rip build, referring to axes instead of joints. The overall format of the ini is different too.
I just want to see if I can get the vismach window and the axis gui up for now. I am running the debian linuxcnc install in a VM for this purpose before biting the bullet and partitioning my drive for a fresh linuxcnc install : )
Cheers
I am at the stage of trying to import my robot into a realtime build and having some trouble.
Is there a guide for importing from a dev / rip build to the realtime, with necessary file formats etc? For example I note that the versions of the PUMA560 ini and HAL file are very different from the rip build, referring to axes instead of joints. The overall format of the ini is different too.
I just want to see if I can get the vismach window and the axis gui up for now. I am running the debian linuxcnc install in a VM for this purpose before biting the bullet and partitioning my drive for a fresh linuxcnc install : )
Cheers
Please Log in or Create an account to join the conversation.
- ozzyrob
-

- Visitor
-

13 May 2018 02:12 #110627
by ozzyrob
Replied by ozzyrob on topic Is there a guide for getting a RIP built sim based bot into a realtime build?
Ok can I make a guess that you are installing linuxcnc from the 2.7 iso ?
Are you doing an upgrade so you are running 2.7.13 or are you not ?
What branch of linuxcnc are you checking out via git ?
I just had a look and the hal files for master are different to 2.7.13
Are you doing an upgrade so you are running 2.7.13 or are you not ?
What branch of linuxcnc are you checking out via git ?
I just had a look and the hal files for master are different to 2.7.13
Please Log in or Create an account to join the conversation.
- Wireline
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 67
- Thank you received: 9
13 May 2018 11:41 #110664
by Wireline
Replied by Wireline on topic Is there a guide for getting a RIP built sim based bot into a realtime build?
Hi ozzyrob
It looks like I am on master for my dev build, and on the old 2.7 for the realtime build, the one that the main installation wiki points to. You are right that the latter is different and has the axis definitions in the HAL file rather than the joint ones found in the master branch.
Do I need to upgrade my realtime install, and is this done via the realtime install itself? I am battling connectivity problems with my realtime install - the installation process seems to complete the DHCP checks fine but then cannot find any network once the OS boots up.
Additionally, should the version actually make any difference? My robot vismach sim works fine in the dev build. Are files created in this incompatible with the 2.7 wheezy? As far as I can see the current Installation Wiki links to a build with the same outdated "axis" hal file.
Thanks!
It looks like I am on master for my dev build, and on the old 2.7 for the realtime build, the one that the main installation wiki points to. You are right that the latter is different and has the axis definitions in the HAL file rather than the joint ones found in the master branch.
Do I need to upgrade my realtime install, and is this done via the realtime install itself? I am battling connectivity problems with my realtime install - the installation process seems to complete the DHCP checks fine but then cannot find any network once the OS boots up.
Additionally, should the version actually make any difference? My robot vismach sim works fine in the dev build. Are files created in this incompatible with the 2.7 wheezy? As far as I can see the current Installation Wiki links to a build with the same outdated "axis" hal file.
Thanks!
Please Log in or Create an account to join the conversation.
- ozzyrob
-
- Visitor
-
13 May 2018 12:06 #110665
by ozzyrob
Replied by ozzyrob on topic Is there a guide for getting a RIP built sim based bot into a realtime build?
2.7.13 seems to be the latest for 2.7
2.8 I don't think is out in the wild yet via upgrade.
I can't recommend which branch you should use. That's better off done by a more senior member.
2.8 I don't think is out in the wild yet via upgrade.
I can't recommend which branch you should use. That's better off done by a more senior member.
Please Log in or Create an account to join the conversation.
- Wireline
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 67
- Thank you received: 9
13 May 2018 12:51 - 13 May 2018 12:55 #110669
by Wireline
Replied by Wireline on topic Is there a guide for getting a RIP built sim based bot into a realtime build?
A quick
Reports that the installed realtime version is 2.7.0, which was downloaded from the wiki link above (with a very recent page update date), so it appears that is the version in the current iso.
Executing my config with linuxcnc -k (to ignore hal file errors) yields a number of error messages relating to undefined TRAJ AXES e.g
so it seems that 2.7.0 is looking for axis definitions in the ini and hal, and 2.7.13 (which I have in my dev build) looks for joint definitions.
Is it possible to get a 2.7.13 iso? Ideally I do not want to rewrite all my files
dpkg -s linuxcnc | grep -i versionReports that the installed realtime version is 2.7.0, which was downloaded from the wiki link above (with a very recent page update date), so it appears that is the version in the current iso.
Executing my config with linuxcnc -k (to ignore hal file errors) yields a number of error messages relating to undefined TRAJ AXES e.g
INIFILE: ERR_TAG_NOT_FOUND, section=TRAJ, tag=AXES, num=1, lineNo=64so it seems that 2.7.0 is looking for axis definitions in the ini and hal, and 2.7.13 (which I have in my dev build) looks for joint definitions.
Is it possible to get a 2.7.13 iso? Ideally I do not want to rewrite all my files
Last edit: 13 May 2018 12:55 by Wireline.
Please Log in or Create an account to join the conversation.
- ozzyrob
-
- Visitor
-
13 May 2018 13:24 #110670
by ozzyrob
Replied by ozzyrob on topic Is there a guide for getting a RIP built sim based bot into a realtime build?
Master is 2.8 which is what you get by cloning the repo, you have to checkout the 2.7 branch if you want to build for 2.7.13.
To get 2.7.13 as a deb you have to upgrade linuxcnc by synaptic.
To get 2.7.13 as a deb you have to upgrade linuxcnc by synaptic.
Please Log in or Create an account to join the conversation.
- Wireline
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 67
- Thank you received: 9
13 May 2018 13:32 - 13 May 2018 13:33 #110673
by Wireline
Replied by Wireline on topic Is there a guide for getting a RIP built sim based bot into a realtime build?
Hi ozzyrob
My mistake - the dev build is 2.8 (which I have installed in another linux install). You are right that came from the git master branch.
My realtime build, installed on a separate partition, is the 2.7.0 that the installation wiki links directly to as a direct iso download, no git involved.
If not downloadable, is it possible to create an iso out of the master branch git files? Getting 2.8 into its own separate partition seems to be the way to go. I cannot upgrade in place due to the connectivity problems in my partitioned install.
My mistake - the dev build is 2.8 (which I have installed in another linux install). You are right that came from the git master branch.
My realtime build, installed on a separate partition, is the 2.7.0 that the installation wiki links directly to as a direct iso download, no git involved.
If not downloadable, is it possible to create an iso out of the master branch git files? Getting 2.8 into its own separate partition seems to be the way to go. I cannot upgrade in place due to the connectivity problems in my partitioned install.
Last edit: 13 May 2018 13:33 by Wireline.
Please Log in or Create an account to join the conversation.
- ozzyrob
-
- Visitor
-
13 May 2018 13:45 #110674
by ozzyrob
Replied by ozzyrob on topic Is there a guide for getting a RIP built sim based bot into a realtime build?
If you follow these instructions for building a 2.8 deb
forum.linuxcnc.org/9-installing-linuxcnc...install-or-deb#86438
I can't see why you can't uninstall 2.7 and install 2.8.......obviously you need the deps, but that's going to be an issue cos of the network problems.....
What are the details of your network device, wired ? wireless? make, model ? Might be able to suss that out for ya.
Does your device get mentioned if you run sudo ifconfig ?
forum.linuxcnc.org/9-installing-linuxcnc...install-or-deb#86438
I can't see why you can't uninstall 2.7 and install 2.8.......obviously you need the deps, but that's going to be an issue cos of the network problems.....
What are the details of your network device, wired ? wireless? make, model ? Might be able to suss that out for ya.
Does your device get mentioned if you run sudo ifconfig ?
Please Log in or Create an account to join the conversation.
- Wireline
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 67
- Thank you received: 9
13 May 2018 17:12 #110690
by Wireline
Replied by Wireline on topic Is there a guide for getting a RIP built sim based bot into a realtime build?
Right, cracked it! It was device drivers. Once the right intel drivers were built and installed, I could connect and then update to 2.8. Bot is now happily scribbling away!
I guess the next part is getting the actual hardware config working and linuxcnc talking to the robot arm. I am guessing that will be stepconf or similar?
Thanks for sticking with me")
I guess the next part is getting the actual hardware config working and linuxcnc talking to the robot arm. I am guessing that will be stepconf or similar?
Thanks for sticking with me
Please Log in or Create an account to join the conversation.
- andypugh
-

- Away
- Moderator
-

Less
More
- Posts: 19863
- Thank you received: 4636
15 May 2018 23:35 - 15 May 2018 23:35 #110781
by andypugh
Replied by andypugh on topic Is there a guide for getting a RIP built sim based bot into a realtime build?
For a robot I would suggest running "master" (which will be 2.8 eventually).
You can actually get that from the Synaptic package manager as a pre-compiled binary.
For a robot I would very much suggest doing that.
buildbot.linuxcnc.org has the instructions.
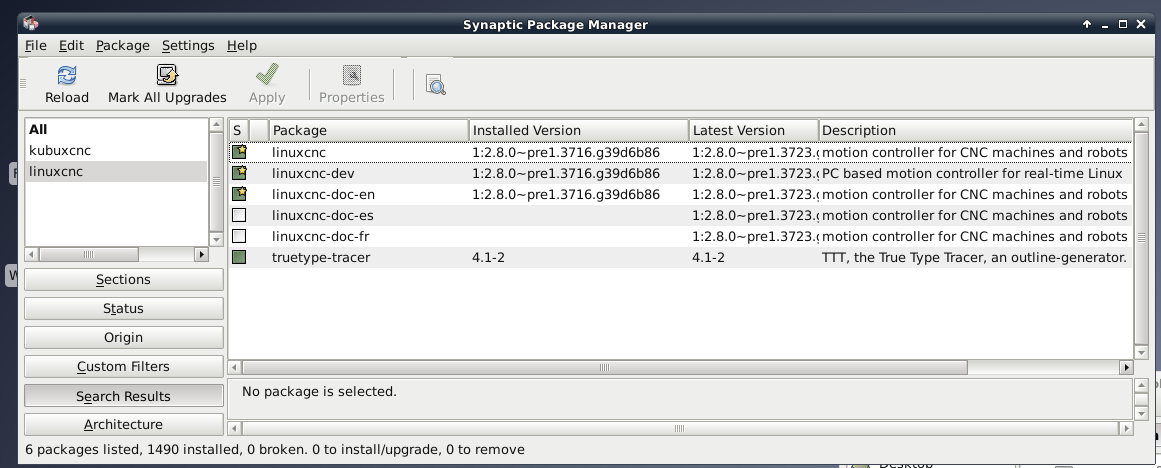
You can actually get that from the Synaptic package manager as a pre-compiled binary.
For a robot I would very much suggest doing that.
buildbot.linuxcnc.org has the instructions.
Last edit: 15 May 2018 23:35 by andypugh.
The following user(s) said Thank You: ozzyrob
Please Log in or Create an account to join the conversation.
- Configuring LinuxCNC
- Advanced Configuration
- Is there a guide for getting a RIP built sim based bot into a realtime build?
Time to create page: 0.249 seconds