- Configuring LinuxCNC
- Advanced Configuration
- Joint vel-cmd for torque PID loop and linear encoder PID
Joint vel-cmd for torque PID loop and linear encoder PID
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17936
- Thank you received: 5255
16 Jul 2018 13:29 - 16 Jul 2018 13:29 #114299
by PCW
Replied by PCW on topic Joint vel-cmd for torque PID loop and linear encoder PID
I would not expect D term to make sense in a velocity loop
The PIDs component command derivative calculation looks correct to me (of course FF1 in a velocity loop
is the rough equivalent of FF2 in a position loop)
So if the command is a velocity, FF1 is acceleration feed forward:
FF1*oldV-newV/deltatime
Which is what the PID component calculates
In a cascaded loop the velocity loop is typically P+I+FF1 (where FF1 is inertia dependent) and the position loop is just P and FF1
The PIDs component command derivative calculation looks correct to me (of course FF1 in a velocity loop
is the rough equivalent of FF2 in a position loop)
So if the command is a velocity, FF1 is acceleration feed forward:
FF1*oldV-newV/deltatime
Which is what the PID component calculates
In a cascaded loop the velocity loop is typically P+I+FF1 (where FF1 is inertia dependent) and the position loop is just P and FF1
Last edit: 16 Jul 2018 13:29 by PCW.
Please Log in or Create an account to join the conversation.
- Glite
- Offline
- Junior Member
-

Less
More
- Posts: 38
- Thank you received: 8
17 Jul 2018 08:13 #114355
by Glite
Replied by Glite on topic Joint vel-cmd for torque PID loop and linear encoder PID
Using D term I start to get noisy response like in image below
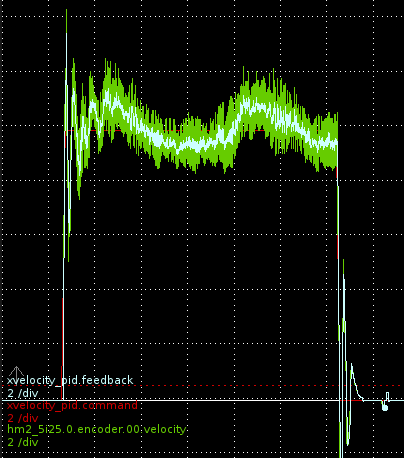
but adding only it to the velocity loop when tuning position loop helps to cancel out oscillations. Adding more D term in velocity loop makes motor whine.
I understand how derivatives are calculated, and what do they mean in each case. What I want to say that for the FF1 term command-deriv pin is not used at all. And it doesn't matter if command-deriv connected or not. FF1 and then FF2 calculation is done from the command pin. I don't know if this has to be like that. But there is a problem which I will describe below.
I also don't see any problems in code with derivative calculations, but it looks like some kind of error is present here. Because on last images you can clearly see that derivative calculated from the position command (velocity command) and velocity command from the TP are not the same. I can't see any other explanation, because the only thing that changes when you disconnect the command-deriv pin, is a command source for the D term to calculate the error. All FFs are using command pin to make calculations.
but adding only it to the velocity loop when tuning position loop helps to cancel out oscillations. Adding more D term in velocity loop makes motor whine.
I understand how derivatives are calculated, and what do they mean in each case. What I want to say that for the FF1 term command-deriv pin is not used at all. And it doesn't matter if command-deriv connected or not. FF1 and then FF2 calculation is done from the command pin. I don't know if this has to be like that. But there is a problem which I will describe below.
I also don't see any problems in code with derivative calculations, but it looks like some kind of error is present here. Because on last images you can clearly see that derivative calculated from the position command (velocity command) and velocity command from the TP are not the same. I can't see any other explanation, because the only thing that changes when you disconnect the command-deriv pin, is a command source for the D term to calculate the error. All FFs are using command pin to make calculations.
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17936
- Thank you received: 5255
17 Jul 2018 12:44 #114373
by PCW
Replied by PCW on topic Joint vel-cmd for torque PID loop and linear encoder PID
in your velocity loop, command derivative (the source for the FF1 term) should not be connected (or if it is connected it should be connected to the TPs commanded acceleration pin which is only available in LinuxCNC master)
Note that if you use the TPs derivatives they will be slightly different than the PIDs D/DT numbers because they will be delayed one servo thread cycle
Note that if you use the TPs derivatives they will be slightly different than the PIDs D/DT numbers because they will be delayed one servo thread cycle
Please Log in or Create an account to join the conversation.
- Glite
- Offline
- Junior Member
-
Less
More
- Posts: 38
- Thank you received: 8
17 Jul 2018 13:06 #114379
by Glite
Replied by Glite on topic Joint vel-cmd for torque PID loop and linear encoder PID
What I want to say is that you can't change source for the FF1 in PID, look at the code again and you will see that, FF1 is always calculated from command.
Servo delay may explain why I get constant following error during acceleration/decceleration when not using TPs commanded velocity for the position-torque loop. It was strange that it ceased to tune at all, I couldn't get rid of that.
*(pid->cmd_d) = (command - pid->prev_cmd) * periodrecip;
..
... *(pid->cmd_d) * *(pid->ff1gain) ...Servo delay may explain why I get constant following error during acceleration/decceleration when not using TPs commanded velocity for the position-torque loop. It was strange that it ceased to tune at all, I couldn't get rid of that.
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17936
- Thank you received: 5255
17 Jul 2018 13:32 #114386
by PCW
Replied by PCW on topic Joint vel-cmd for torque PID loop and linear encoder PID
Both the PID's feedback derivative and command derivative can be overridden by external inputs. that is they are calculated by D/DT if left unconnected
This appears to be done by some pointer magic:
pid.N.command-deriv float in
The derivative of the desired (commanded) value for the control
loop. If no signal is connected then the derivative will be
estimated numerically.
pid.N.feedback-deriv float in
The derivative of the actual (feedback) value for the control
loop. If no signal is connected then the derivative will be
estimated numerically. When the feedback is from a quantized
position source (e.g., encoder feedback position), behavior of
the D term can be improved by using a better velocity estimate
here, such as the velocity output of encoder(9) or hostmot2(9).
This appears to be done by some pointer magic:
pid.N.command-deriv float in
The derivative of the desired (commanded) value for the control
loop. If no signal is connected then the derivative will be
estimated numerically.
pid.N.feedback-deriv float in
The derivative of the actual (feedback) value for the control
loop. If no signal is connected then the derivative will be
estimated numerically. When the feedback is from a quantized
position source (e.g., encoder feedback position), behavior of
the D term can be improved by using a better velocity estimate
here, such as the velocity output of encoder(9) or hostmot2(9).
Please Log in or Create an account to join the conversation.
- Glite
- Offline
- Junior Member
-
Less
More
- Posts: 38
- Thank you received: 8
17 Jul 2018 21:37 #114417
by Glite
Replied by Glite on topic Joint vel-cmd for torque PID loop and linear encoder PID
Pointer magic is only working for the D term calculations, FF1 is still calculated from the command in any case.
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17936
- Thank you received: 5255
17 Jul 2018 23:35 - 17 Jul 2018 23:36 #114437
by PCW
Replied by PCW on topic Joint vel-cmd for torque PID loop and linear encoder PID
That's odd the code seems to be the same for both
So that looks like a bug with the PIDs command-deriv handling
So that looks like a bug with the PIDs command-deriv handling
Last edit: 17 Jul 2018 23:36 by PCW.
Please Log in or Create an account to join the conversation.
- Glite
- Offline
- Junior Member
-
Less
More
- Posts: 38
- Thank you received: 8
18 Jul 2018 05:37 #114446
by Glite
Replied by Glite on topic Joint vel-cmd for torque PID loop and linear encoder PID
I reviewed the code not once and here what I saw:
On line 366-368 derivatives are calculated to dummy sigs:On line 371 D term error is calculated:Here where pointer magic comes to play, if command-deriv pin is not connected, pid->commandvds and pid->commandv have the same adress, and when you calculate the derivatives, in *(pid->commandv) you will have the same value as in *(pid->commandvds). If it's connected they won't have the same adress, and dummy sigs calculation will not make impact on value of *(pid->commandv).
But when it comes to calculate feed-forward derivatives instead of assigning the *(pid->commandv) value*(pid->cmd_d) is calculated again from the command. To really use the command-deriv pin for the feed-forward it should look like this:
On line 366-368 derivatives are calculated to dummy sigs:
if(!(pid->prev_ie && !*(pid->index_enable))) {
*(pid->commandvds) = (command - pid->prev_cmd) * periodrecip;
*(pid->feedbackvds) = (feedback - pid->prev_fb) * periodrecip;
}*(pid->error_d) = *(pid->commandv) - *(pid->feedbackv);But when it comes to calculate feed-forward derivatives instead of assigning the *(pid->commandv) value
if(!(pid->prev_ie && !*(pid->index_enable))) {
// not falling edge of index_enable: the normal case
*(pid->cmd_d) = (command - pid->prev_cmd) * periodrecip;
}*(pid->cmd_d) = *(pid->commandv);Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17936
- Thank you received: 5255
18 Jul 2018 14:09 #114473
by PCW
Replied by PCW on topic Joint vel-cmd for torque PID loop and linear encoder PID
Right, so it looks like when the index detect fixups were added to command-deriv the dummysig magic was left out
Please Log in or Create an account to join the conversation.
- Nitram
-
- Offline
- Elite Member
-

Less
More
- Posts: 210
- Thank you received: 15
19 Dec 2018 03:26 - 19 Dec 2018 03:26 #122588
by Nitram
Replied by Nitram on topic Joint vel-cmd for torque PID loop and linear encoder PID
Just wondering if this has been fixed as yet?
On an interesting but slightly different note:
1. on setup, PnC config lists all the PID pins including pid.N.command-deriv, but never pid.N.feedback-deriv and
2. z-vel-fb gets connected to hm2..encoder..velocity, but the z-vel-fb signal does not connect to any other pins (and certainly not pid.N.feedback-deriv as it is not listed).
Also, is this why in some other threads there has been some advice to comment out the pid.N.command-deriv and simply let the default algorithm handle this given:
On an interesting but slightly different note:
1. on setup, PnC config lists all the PID pins including pid.N.command-deriv, but never pid.N.feedback-deriv and
2. z-vel-fb gets connected to hm2..encoder..velocity, but the z-vel-fb signal does not connect to any other pins (and certainly not pid.N.feedback-deriv as it is not listed).
Also, is this why in some other threads there has been some advice to comment out the pid.N.command-deriv and simply let the default algorithm handle this given:
so it looks like when the index detect fixups were added to command-deriv the dummysig magic was left out
Last edit: 19 Dec 2018 03:26 by Nitram.
Please Log in or Create an account to join the conversation.
- Configuring LinuxCNC
- Advanced Configuration
- Joint vel-cmd for torque PID loop and linear encoder PID
Time to create page: 0.100 seconds