Pentapod configuration
- Tawhiri
- Offline
- New Member
-

Less
More
- Posts: 8
- Thank you received: 0
31 May 2021 05:51 #210772
by Tawhiri
Pentapod configuration was created by Tawhiri
I am working on a pentapod machine, and I'm looking for advice about connecting my hardware.
I understand that since 2.8 compiling the pentapod kinematics with comp or halcomp is no longer necessary. (I realized this after messing up the *.ko files and having to reinstall LCNC)
Now I have a fresh install of LCNC 2.8. I created a basic pentapod configuration with the configuration selector.
My parallel ports, drivers and motors are working ok with a trivial config. (though sometimes the program complains about a missing port - but actually both works fine)
The part where I am stuck is that in which files should I put my port addresses and the pin layout?
LinuxCNC seems to ignore what I write in 'pentapod_cmds.hal', and when closing the program it reverts the file to its initial state.
I looked at the HAL files in the folder 'hallib', but none of them appears to be the obvious choice, and they are read-only anyway, so I'm guessing that I should keep them as they are.
And the second part of the question: exactly what should I write in this file? Looking at the HAL I can't see much common with the trivial design's HAL. A working example would be hugely useful.
Many thanks in advance
András
I understand that since 2.8 compiling the pentapod kinematics with comp or halcomp is no longer necessary. (I realized this after messing up the *.ko files and having to reinstall LCNC)
Now I have a fresh install of LCNC 2.8. I created a basic pentapod configuration with the configuration selector.
My parallel ports, drivers and motors are working ok with a trivial config. (though sometimes the program complains about a missing port - but actually both works fine)
The part where I am stuck is that in which files should I put my port addresses and the pin layout?
LinuxCNC seems to ignore what I write in 'pentapod_cmds.hal', and when closing the program it reverts the file to its initial state.
I looked at the HAL files in the folder 'hallib', but none of them appears to be the obvious choice, and they are read-only anyway, so I'm guessing that I should keep them as they are.
And the second part of the question: exactly what should I write in this file? Looking at the HAL I can't see much common with the trivial design's HAL. A working example would be hugely useful.
Many thanks in advance
András
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19886
- Thank you received: 4645
31 May 2021 08:13 #210779
by andypugh
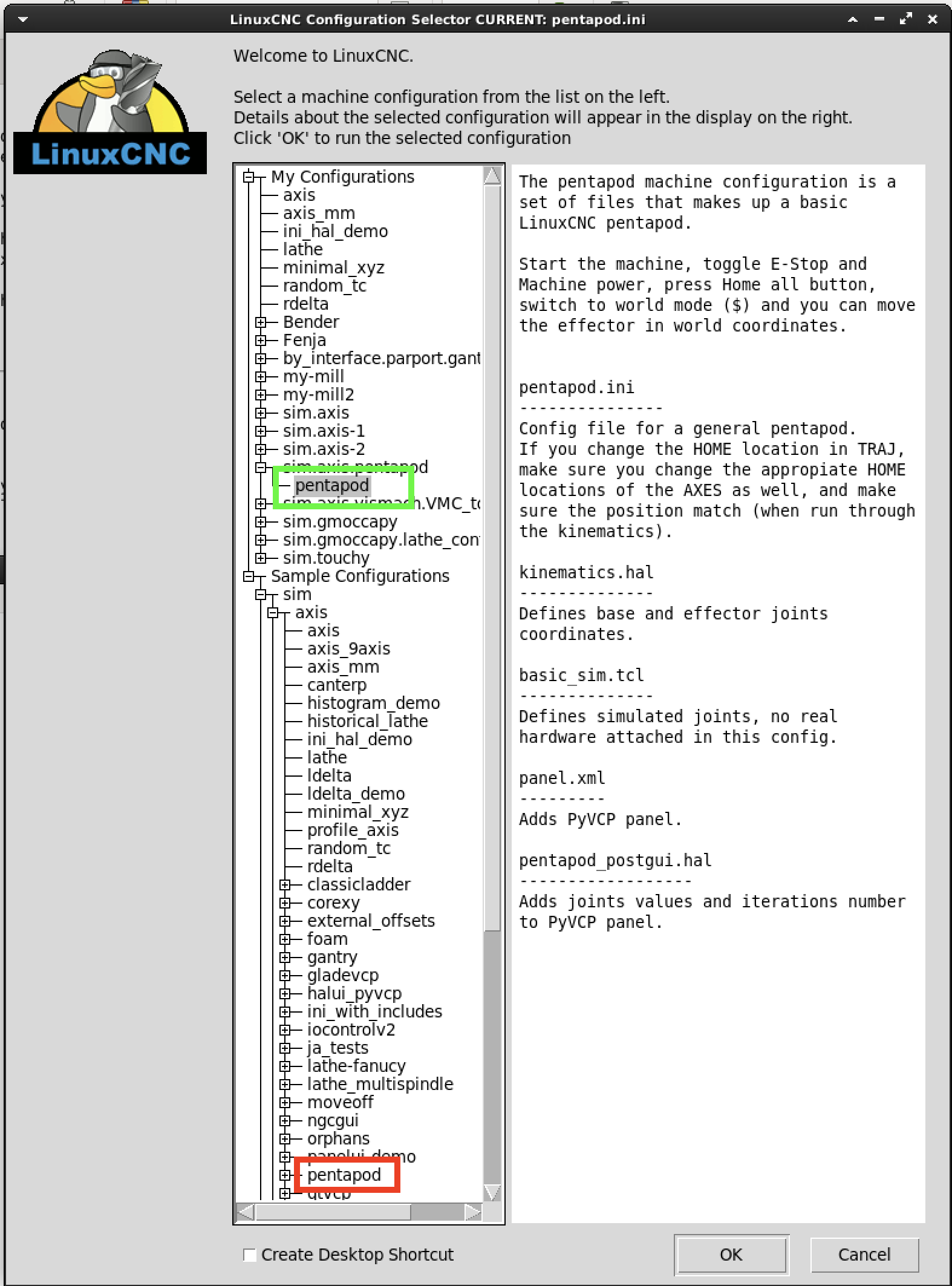
It sounds like you might be re-opening the Sample Configs -> sim -> axis -> Pentapod configuration.
The first time you open a sample config it is copied into your home directory into ~/linuxcnc/configs.
You can access that from the config picker by expanding the "My configs" section:
Replied by andypugh on topic Pentapod configuration
The part where I am stuck is that in which files should I put my port addresses and the pin layout?
LinuxCNC seems to ignore what I write in 'pentapod_cmds.hal', and when closing the program it reverts the file to its initial state.
It sounds like you might be re-opening the Sample Configs -> sim -> axis -> Pentapod configuration.
The first time you open a sample config it is copied into your home directory into ~/linuxcnc/configs.
You can access that from the config picker by expanding the "My configs" section:
Attachments:
The following user(s) said Thank You: Tawhiri
Please Log in or Create an account to join the conversation.
- Tawhiri
- Offline
- New Member
-
Less
More
- Posts: 8
- Thank you received: 0
01 Jun 2021 08:00 #210862
by Tawhiri
Replied by Tawhiri on topic Pentapod configuration
Thank you for the quick reply.
I am using the config under "My Configurations".
And the issue remains when I make a new copy of the config: all I put into the HAL file is ignored and the file is overwritten.
I am using the config under "My Configurations".
And the issue remains when I make a new copy of the config: all I put into the HAL file is ignored and the file is overwritten.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19886
- Thank you received: 4645
01 Jun 2021 08:02 #210863
by andypugh
Replied by andypugh on topic Pentapod configuration
Why are you making a new copy of the config?
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19886
- Thank you received: 4645
01 Jun 2021 08:11 #210864
by andypugh
Replied by andypugh on topic Pentapod configuration
Can you explain the sequence of events?
If you open a config from the "Sample Configs" then a copy is made in your home linuxcnc directory.
If you open the same sample config gain, it creates another copy of the sample config. You can see this in my screenshot as I have sim,axis, sim.axis-1, sim,axis-2 and so on.
Any changes you make in the files in your home directory should not be over-written unless you re-run one of the config wizards.
If you open a config from the "Sample Configs" then a copy is made in your home linuxcnc directory.
If you open the same sample config gain, it creates another copy of the sample config. You can see this in my screenshot as I have sim,axis, sim.axis-1, sim,axis-2 and so on.
Any changes you make in the files in your home directory should not be over-written unless you re-run one of the config wizards.
Please Log in or Create an account to join the conversation.
- Tawhiri
- Offline
- New Member
-
Less
More
- Posts: 8
- Thank you received: 0
01 Jun 2021 08:38 #210868
by Tawhiri
Replied by Tawhiri on topic Pentapod configuration
I made the copy to see if creating something without the config selector helps.
Here is what I did:
1. open 'home/andras/configs/sim.axis.pentapod/'pentapod_cmds.hal'
2. add this line: 'loadrt hal_parport cfg="0x1100 0x2100" '
3. run linuxCNC using the '/home/andras/linuxcnc/configs/sim.axis.pentapod/pentapod.ini'
4. close linuxCNC
5 open '..home/andras/configs/sim.axis.pentapod/'pentapod_cmds.hal' again: the line about the ports is gone
The weird thing is that my trivial config, which I created without the config selector (copied and edited some files from github) is working fine.
Maybe there is a line somewhere in one of the files which launches a config tool in the background which overwrites the files?
Here is what I did:
1. open 'home/andras/configs/sim.axis.pentapod/'pentapod_cmds.hal'
2. add this line: 'loadrt hal_parport cfg="0x1100 0x2100" '
3. run linuxCNC using the '/home/andras/linuxcnc/configs/sim.axis.pentapod/pentapod.ini'
4. close linuxCNC
5 open '..home/andras/configs/sim.axis.pentapod/'pentapod_cmds.hal' again: the line about the ports is gone
The weird thing is that my trivial config, which I created without the config selector (copied and edited some files from github) is working fine.
Maybe there is a line somewhere in one of the files which launches a config tool in the background which overwrites the files?
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19886
- Thank you received: 4645
01 Jun 2021 09:57 #210873
by andypugh
Not the problem, but you might want to "in" or "out" after each address:
linuxcnc.org/docs/2.8/html/hal/parallel-port.html
(I thought that it was necessary, but the docs say that it is optional)
This is extremely odd. I have never seen this.
Try making a complete copy of the config directory and working in that instead.
Replied by andypugh on topic Pentapod configuration
2. add this line: 'loadrt hal_parport cfg="0x1100 0x2100" '
Not the problem, but you might want to "in" or "out" after each address:
linuxcnc.org/docs/2.8/html/hal/parallel-port.html
(I thought that it was necessary, but the docs say that it is optional)
5 open '..home/andras/configs/sim.axis.pentapod/'pentapod_cmds.hal' again: the line about the ports is gone
This is extremely odd. I have never seen this.
Try making a complete copy of the config directory and working in that instead.
Please Log in or Create an account to join the conversation.
- Tawhiri
- Offline
- New Member
-
Less
More
- Posts: 8
- Thank you received: 0
01 Jun 2021 12:35 #210883
by Tawhiri
Replied by Tawhiri on topic Pentapod configuration
Found the solution:
in the INI file this linehad to be replaced with this:
Actually the text in the HAL file explains this rather clearly:Moral of the story: reading helps ")
in the INI file this line
HALFILE = LIB:basic_sim.tclHALFILE = ./pentapod_cmds.halActually the text in the HAL file explains this rather clearly:
# To use ./pentapod_cmds.hal in the original inifile (or a copy of it),
# edit to change:
# [HAL]
# HALFILE = LIB:basic_sim.tcl parameters
# to:
# [HAL]
# HALFILE = ./pentapod_cmds.hal Please Log in or Create an account to join the conversation.
Time to create page: 0.100 seconds