Holding single axis
- bednarzmac
- Offline
- New Member
-

Less
More
- Posts: 10
- Thank you received: 0
25 Oct 2021 13:07 - 25 Oct 2021 13:10 #224260
by bednarzmac
Holding single axis was created by bednarzmac
Hi, Im working on quite atypical machine. Its bender with 3 axis but bending is obtained by pushing tube (in X Axis) via rollers which are driving it to next rollers which can move in Y Axis (perpendicular to X) So bigger y axis position the tighter bending radius we get. So far everything works like a charm but i've got problem with A axis caused by X axis:
1. X axis encoder is counting position from rubbered wheel dragged on the moved material (tube, profile etc).
2. When I want to rotate tube (a axis) i need to loose driving rollers to let the tube rotate and enable brake on A axis cart (to avoid loosing position in X axis) (cart with Aaxis can move in X axis)
3. When I loose driving rollers, encoder in X axis sometimes triggering and motion controller tries to come back to position but driving rollers are loose so they are rotating but the material and encoder not. So I have X axis error immediately.
I think about three options:
1. Disable encoder counting when rollers are loos (i won't lose overall position thanks to brake on Aaxis cart) - i don't know how:)
2. Set pid deadband in X axis to 5mm when rollers are loose and get it back to original setting after closing the rollers.
3. Disable X axis when roller are loose - i don't know how:)
I was trying to change deadband via m code but nothing happens. When I execute hal command deadband changes but via Mcode nothing happens. Why?
M101 code:M102 code:
Other Mcodes works
Maybe there is any other solution?
Regards
1. X axis encoder is counting position from rubbered wheel dragged on the moved material (tube, profile etc).
2. When I want to rotate tube (a axis) i need to loose driving rollers to let the tube rotate and enable brake on A axis cart (to avoid loosing position in X axis) (cart with Aaxis can move in X axis)
3. When I loose driving rollers, encoder in X axis sometimes triggering and motion controller tries to come back to position but driving rollers are loose so they are rotating but the material and encoder not. So I have X axis error immediately.
I think about three options:
1. Disable encoder counting when rollers are loos (i won't lose overall position thanks to brake on Aaxis cart) - i don't know how:)
2. Set pid deadband in X axis to 5mm when rollers are loose and get it back to original setting after closing the rollers.
3. Disable X axis when roller are loose - i don't know how:)
I was trying to change deadband via m code but nothing happens. When I execute hal command deadband changes but via Mcode nothing happens. Why?
M101 code:
setp pid.0.deadband 5 exit 0setp pid.0.deadband [JOINT_0]DEADBANDOther Mcodes works
Maybe there is any other solution?
Regards
Last edit: 25 Oct 2021 13:10 by bednarzmac.
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19886
- Thank you received: 4645
25 Oct 2021 13:52 - 25 Oct 2021 13:52 #224264
by andypugh
Replied by andypugh on topic Holding single axis
I think that I would do this with a custom HAL component that holds the X encoder position when triggered.
But I think it can probably be done with standard components, just not as neatly.
You need to accumulate an offset in a HAL signal and then subtract that from the encoder position number before passing it to motion.
(Note that subtraction in HAL is done by using the sum2 component with a negative gain on one input)
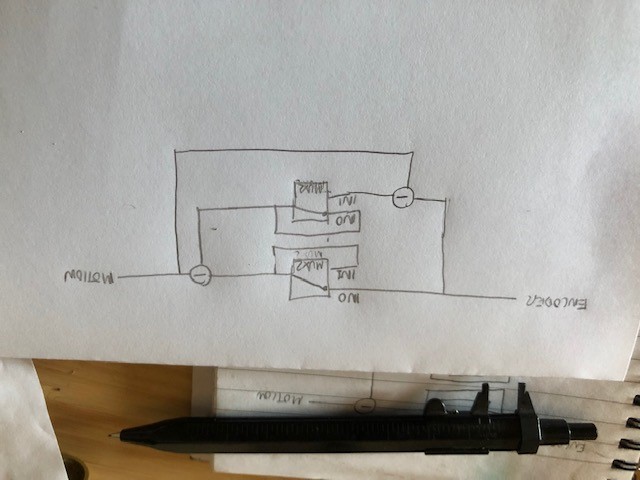
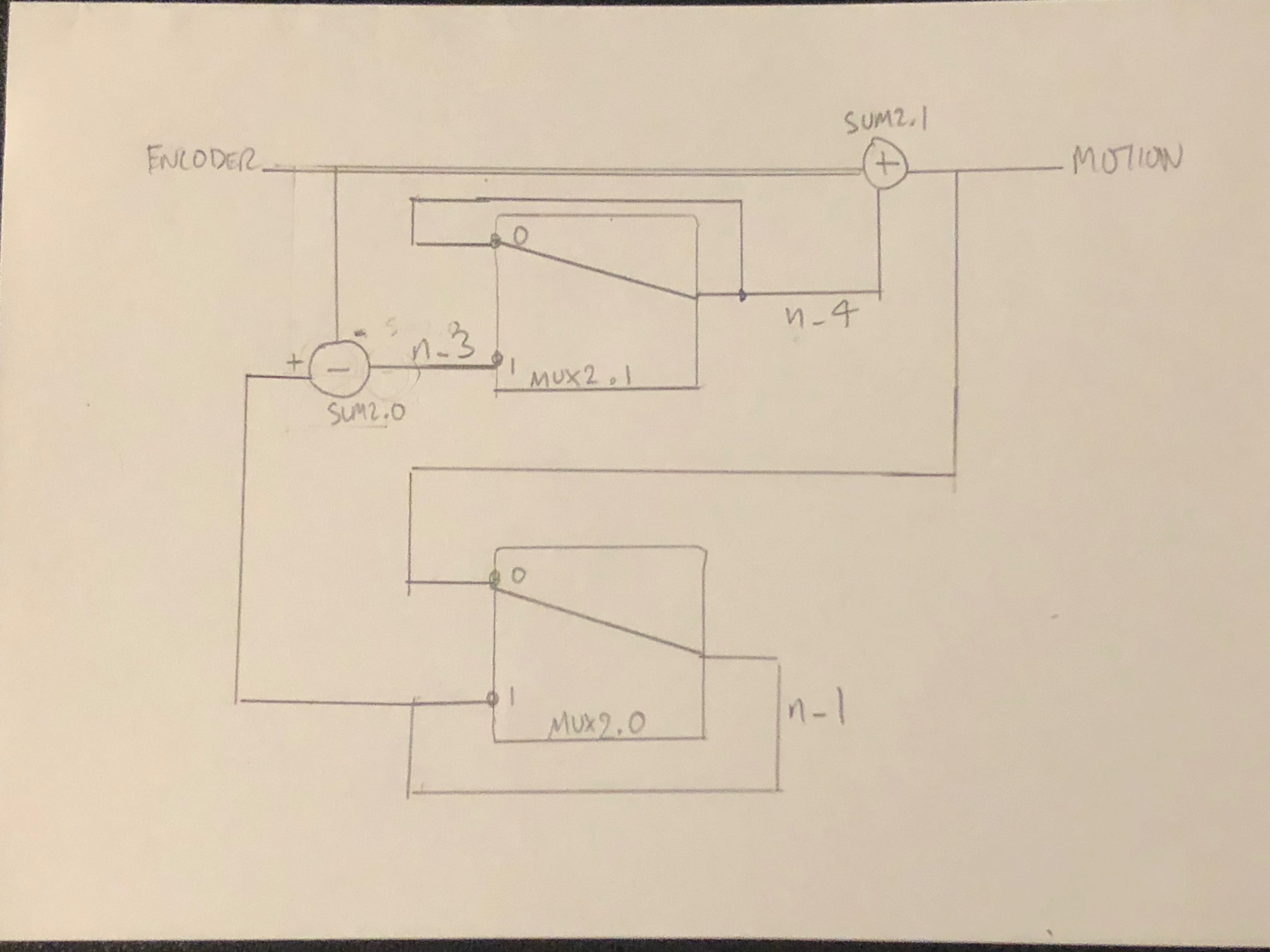
The built-in sample-hold component in HAL only works with integers, and this will need to work with floating point numbers. The workaround is to use the mux2 component looped back to itself.
I think that this structure of 2 x mux2 and 2 x sum2 will do what is needed, but my only "testing" has been looking at the picture and imagining the numbers on the pins")
But I think it can probably be done with standard components, just not as neatly.
You need to accumulate an offset in a HAL signal and then subtract that from the encoder position number before passing it to motion.
(Note that subtraction in HAL is done by using the sum2 component with a negative gain on one input)
The built-in sample-hold component in HAL only works with integers, and this will need to work with floating point numbers. The workaround is to use the mux2 component looped back to itself.
I think that this structure of 2 x mux2 and 2 x sum2 will do what is needed, but my only "testing" has been looking at the picture and imagining the numbers on the pins
Attachments:
Last edit: 25 Oct 2021 13:52 by andypugh.
The following user(s) said Thank You: bednarzmac
Please Log in or Create an account to join the conversation.
- bednarzmac
- Offline
- New Member
-
Less
More
- Posts: 10
- Thank you received: 0
25 Oct 2021 16:51 - 25 Oct 2021 17:09 #224284
by bednarzmac
Replied by bednarzmac on topic Holding single axis
Thanks for response. That is brilliant idea but when i change mux2.0.sel =1 and mux2.1.sel=1 it seems to go in endless loop. (endless counting). Am i doing it in the right way?
#load mux2
loadrt mux2 count=2
addf mux2.0 servo-thread
addf mux2.1 servo-thread
#load sum2
loadrt sum2 count=2
addf sum2.0 servo-thread
addf sum2.1 servo-thread
setp sum2.0.gain0 -1
setp mux2.1.in1 0
setp mux2.0.sel FALSE
setp mux2.1.sel FALSE
net n_1 hm2_[HOSTMOT2](BOARD).0.encoder.00.position => sum2.0.in0 => mux2.0.in0
net motor.00.pos-fb mux2.0.out => sum2.1.in0 => mux2.0.in1
net n_2 sum2.1.out => sum2.0.in1 => pid.0.feedback => joint.0.motor-pos-fb #push copy back to Axis GUI
net n_3 sum2.0.out => mux2.1.in1
net n_4 mux2.1.out => mux2.1.in0 => sum2.1.in1
Last edit: 25 Oct 2021 17:09 by andypugh.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19886
- Thank you received: 4645
25 Oct 2021 19:22 - 25 Oct 2021 19:27 #224292
by andypugh
Replied by andypugh on topic Holding single axis
I did admit that I hadn't tested it.
After some trial and error, this seems to work. It is a standalone config that you can try with "halrun -I test.hal" if you save it as test.hal. Then you can "sets encoder 100" to change encoder counts and "sets hold 1" to set the hold input.
After some trial and error, this seems to work. It is a standalone config that you can try with "halrun -I test.hal" if you save it as test.hal. Then you can "sets encoder 100" to change encoder counts and "sets hold 1" to set the hold input.
loadrt threads
#load mux2
loadrt mux2 count=2
addf mux2.0 thread1
addf mux2.1 thread1
#load sum2
loadrt sum2 count=2
addf sum2.0 thread1
addf sum2.1 thread1
setp sum2.0.gain1 -1
setp sum2.1.gain1 1
setp mux2.1.in1 0
setp mux2.0.sel FALSE
setp mux2.1.sel FALSE
net encoder sum2.1.in0 sum2.0.in1
net n_1 mux2.0.out => sum2.0.in0 mux2.0.in1
net output sum2.1.out mux2.0.in0
net n_3 sum2.0.out => mux2.1.in1
net n_4 mux2.1.out => mux2.1.in0 sum2.1.in1
net hold mux2.0.sel mux2.1.sel
loadusr halmeter signal output
loadusr halmeter signal encoder
loadusr halmeter signal n_1
loadusr halmeter signal n_3
loadusr halmeter signal n_4
start
Attachments:
Last edit: 25 Oct 2021 19:27 by andypugh.
The following user(s) said Thank You: bednarzmac
Please Log in or Create an account to join the conversation.
- bednarzmac
- Offline
- New Member
-
Less
More
- Posts: 10
- Thank you received: 0
25 Oct 2021 19:39 #224293
by bednarzmac
Replied by bednarzmac on topic Holding single axis
Thank you for your effort mate!!
I've managed to solve the problem with setting deadband to 5mm just before unlocking rollers and 0.05mm after closing them it's just simpler for me and it works.
My next problem appeared when i was trying to do this automatically with LOCKING_INDEXER_JOINT = 2
I cant get joint.2.unlock, unlocked, etc.. pins
I can't understand this from documentation:
"
unlock_joints_mask=jointmask
The jointmask bits are: (LSB)0:joint0, 1:joint1, 2:joint2, ...
Example: loadrt motmod ... unlock_joints_mask=0x38
creates unlock pins for joints 3,4,5
"
Where I should use this? Hal? INI?
I'll end work for today, its too much for one afternoon:)
Regards Maciek
I've managed to solve the problem with setting deadband to 5mm just before unlocking rollers and 0.05mm after closing them it's just simpler for me and it works.
My next problem appeared when i was trying to do this automatically with LOCKING_INDEXER_JOINT = 2
I cant get joint.2.unlock, unlocked, etc.. pins
I can't understand this from documentation:
"
unlock_joints_mask=jointmask
The jointmask bits are: (LSB)0:joint0, 1:joint1, 2:joint2, ...
Example: loadrt motmod ... unlock_joints_mask=0x38
creates unlock pins for joints 3,4,5
"
Where I should use this? Hal? INI?
I'll end work for today, its too much for one afternoon:)
Regards Maciek
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19886
- Thank you received: 4645
25 Oct 2021 19:45 #224294
by andypugh
Ignoring the encoder might give a technically better solution. If so, the answer is above.
At the moment locking indexer is only allowed with rotary joints. I don't know if that is the issue.
Probably in the HAL, but it is possible that the HAL gets that line from the INI.
It will be early on in the HAL file, wherever it is.
Replied by andypugh on topic Holding single axis
Thank you for your effort mate!!
I've managed to solve the problem with setting deadband to 5mm just before unlocking rollers and 0.05mm after closing them it's just simpler for me and it works.
Ignoring the encoder might give a technically better solution. If so, the answer is above.
My next problem appeared when i was trying to do this automatically with LOCKING_INDEXER_JOINT = 2
At the moment locking indexer is only allowed with rotary joints. I don't know if that is the issue.
Example: loadrt motmod ... unlock_joints_mask=0x38
creates unlock pins for joints 3,4,5
"
Where I should use this? Hal? INI?
Probably in the HAL, but it is possible that the HAL gets that line from the INI.
It will be early on in the HAL file, wherever it is.
Please Log in or Create an account to join the conversation.
Time to create page: 0.114 seconds