$ paying_gig % Meca500 DH Parameters
- ftree
- Offline
- Premium Member
-

Less
More
- Posts: 116
- Thank you received: 10
09 Aug 2022 19:48 #249425
by ftree
$ paying_gig % Meca500 DH Parameters was created by ftree
Hi!
I am in need of working DH params for the Meca500 robot. I can offer $200 for a prompt solution.
My genserkins based sim folder is here with some debian installer instructions.
github.com/djsftree/linuxcnc_meca500
You'll find a VTK app there too to help you
Relevant manual pages
cdn.mecademic.com/uploads/docs/meca500-r...#subsubsection.1.1.1
3D model
cdn.mecademic.com/uploads/docs/meca500-robot-assembled-stp.zip
Please reply only if you have the time to work on this ASAP.
Many thanks and best regards!
I am in need of working DH params for the Meca500 robot. I can offer $200 for a prompt solution.
My genserkins based sim folder is here with some debian installer instructions.
github.com/djsftree/linuxcnc_meca500
You'll find a VTK app there too to help you
Relevant manual pages
cdn.mecademic.com/uploads/docs/meca500-r...#subsubsection.1.1.1
3D model
cdn.mecademic.com/uploads/docs/meca500-robot-assembled-stp.zip
Please reply only if you have the time to work on this ASAP.
Many thanks and best regards!
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4768
- Thank you received: 2138
09 Aug 2022 20:32 #249430
by Aciera
Replied by Aciera on topic $ paying_gig % Meca500 DH Parameters
Have a look here, plug in the dimensions of your robot and save the money:
forum.linuxcnc.org/media/kunena/attachme...eters_2020-03-31.pdf
forum.linuxcnc.org/media/kunena/attachme...eters_2020-03-31.pdf
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- ftree
- Offline
- Premium Member
-
Less
More
- Posts: 116
- Thank you received: 10
09 Aug 2022 20:53 #249433
by ftree
Replied by ftree on topic $ paying_gig % Meca500 DH Parameters
Thanks! I've been trying that. So many interations later. I require someone who knows what they're doing.
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4768
- Thank you received: 2138
10 Aug 2022 08:13 #249439
by Aciera
Replied by Aciera on topic $ paying_gig % Meca500 DH Parameters
I don't have the time to install and check your config but looking over your config I don't see anything obviously wrong with the dh parameters you came up with (although I did not check the distances of the joints).
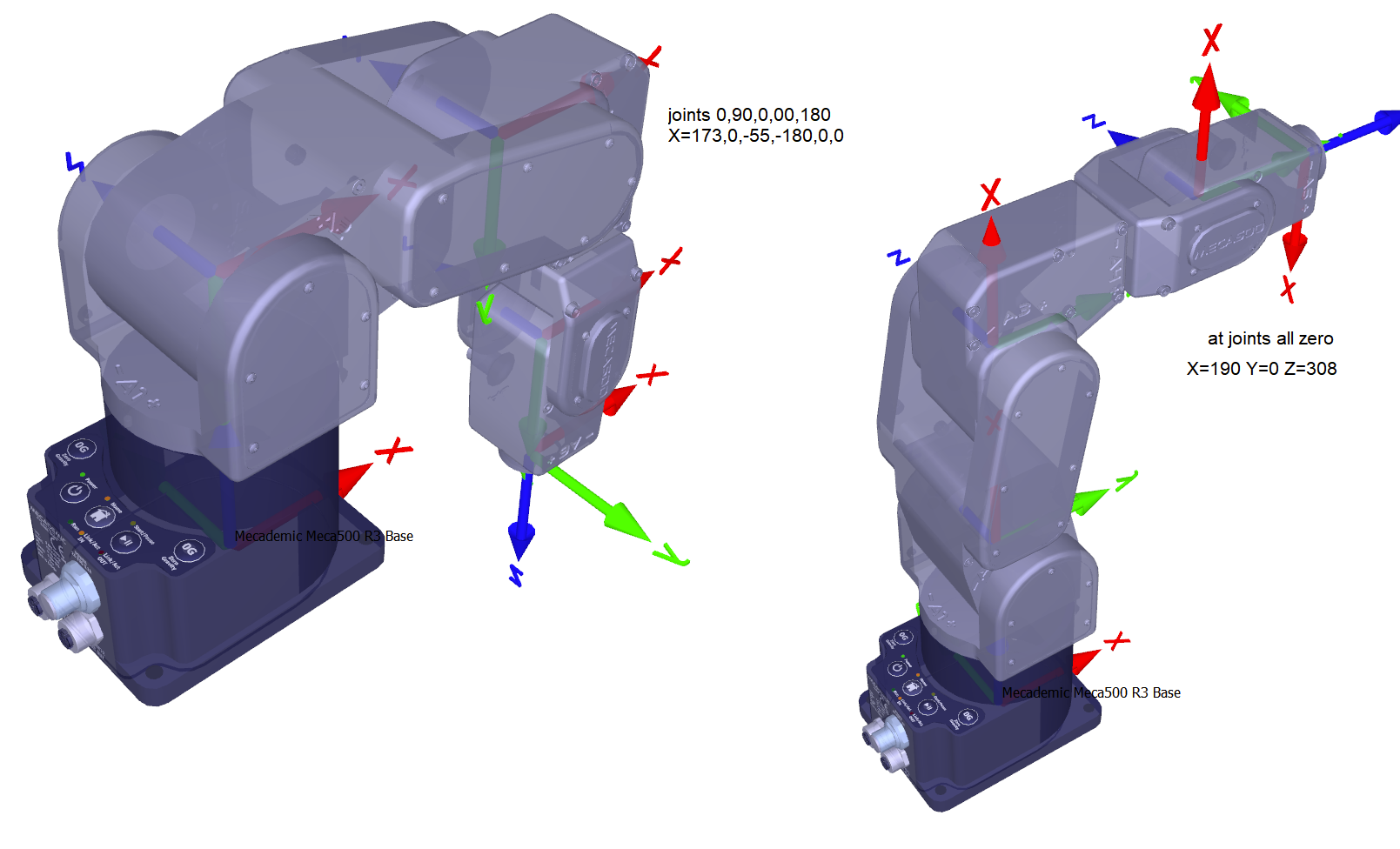
My first suspicion would be that your graphical simulation model is not set up correctly. Make sure it reflects the rotation of Joint 1 by 90° that was needed to set up the dh-parameters as genserkins doesn't allow to set theta values. So with all joints set to zero the hand in your simulation model should be pointing to the floor. ie as in the left pose in your first picture of your initial post, joint 1 would be 0° in your config and not 90° as in the picture.
My first suspicion would be that your graphical simulation model is not set up correctly. Make sure it reflects the rotation of Joint 1 by 90° that was needed to set up the dh-parameters as genserkins doesn't allow to set theta values. So with all joints set to zero the hand in your simulation model should be pointing to the floor. ie as in the left pose in your first picture of your initial post, joint 1 would be 0° in your config and not 90° as in the picture.
Please Log in or Create an account to join the conversation.
- ftree
- Offline
- Premium Member
-
Less
More
- Posts: 116
- Thank you received: 10
10 Aug 2022 16:59 #249459
by ftree
Replied by ftree on topic $ paying_gig % Meca500 DH Parameters
Thanks for replies.
I think I finally solved it.
HOME in TRAJ needed populating with offsets.
I think I finally solved it.
HOME in TRAJ needed populating with offsets.
Please Log in or Create an account to join the conversation.
- ftree
- Offline
- Premium Member
-
Less
More
- Posts: 116
- Thank you received: 10
10 Aug 2022 17:04 #249460
by ftree
Replied by ftree on topic $ paying_gig % Meca500 DH Parameters
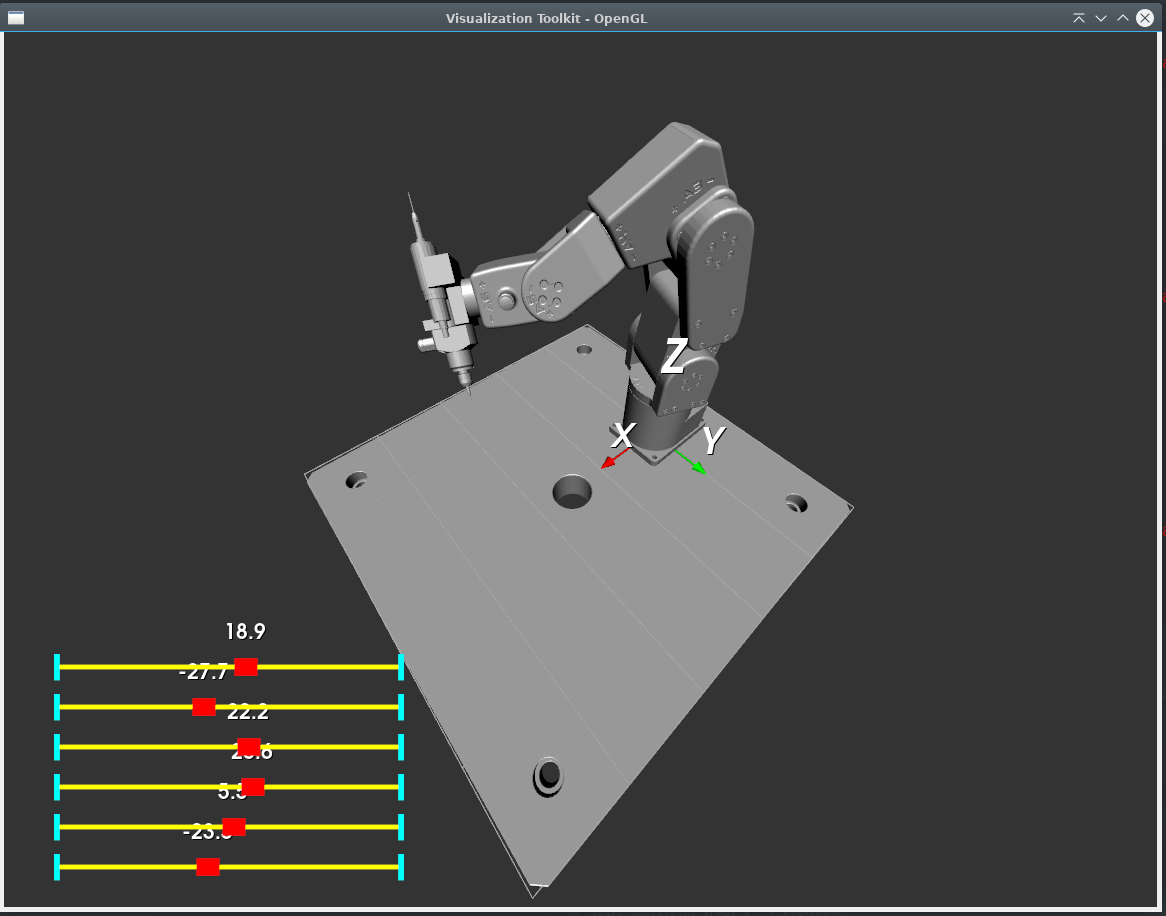
X+ moves Z+
Z+ moves Y+
other axes no idea just yet.
Checked in
github.com/djsftree/linuxcnc_meca500
Z+ moves Y+
other axes no idea just yet.
Checked in
github.com/djsftree/linuxcnc_meca500
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
Less
More
- Posts: 4768
- Thank you received: 2138
10 Aug 2022 17:38 #249463
by Aciera
Replied by Aciera on topic $ paying_gig % Meca500 DH Parameters
Interesting, I never quite understood how these values differ from the "HOME" offsets in the JOINT_n sections. So, are you using this to offset errors in you simulation model or on the actual robot?HOME in TRAJ needed populating with offsets.
Please Log in or Create an account to join the conversation.
- ftree
- Offline
- Premium Member
-
Less
More
- Posts: 116
- Thank you received: 10
10 Aug 2022 17:55 - 10 Aug 2022 18:00 #249466
by ftree
Replied by ftree on topic $ paying_gig % Meca500 DH Parameters
I'm wondering if
[TRAJ]
HOME should maybe be renamed to KINS_OFFSETS
JOINT HOME is where the machine moves to for homing and not related to the kinematics selections. I think.
[TRAJ]
HOME should maybe be renamed to KINS_OFFSETS
JOINT HOME is where the machine moves to for homing and not related to the kinematics selections. I think.
Last edit: 10 Aug 2022 18:00 by ftree.
Please Log in or Create an account to join the conversation.
Time to create page: 0.396 seconds