Servo Tuning in Velocity Mode
- SkyMoCo
- Offline
- Junior Member
-

Less
More
- Posts: 33
- Thank you received: 4
21 Oct 2023 03:31 #283414
by SkyMoCo
Servo Tuning in Velocity Mode was created by SkyMoCo
Am pretty experienced with steppers, having built quite a few machines. But a nice router with servos came my way and I figured I would give servos a go. I wanted to use the existing drivers and from what I could piece together, setting them in velocity mode is the way to go here. Picked up a 7i62/7i77 combo and with a bit of internet research , got it all wired up and the system calibrated so it's accurate.
I read everything on this forum I could around servo tunings and feel like I have a basic grasp of at least the main parameters.
Started off with what looked like a sine wave and am currently at what I think is pretty decent but having no reference, am not sure.
First picture is where I started and second is where I am at now. Do these values seem reasonable?
I read everything on this forum I could around servo tunings and feel like I have a basic grasp of at least the main parameters.
Started off with what looked like a sine wave and am currently at what I think is pretty decent but having no reference, am not sure.
First picture is where I started and second is where I am at now. Do these values seem reasonable?
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21767
- Thank you received: 7440
21 Oct 2023 06:05 #283424
by tommylight
Replied by tommylight on topic Servo Tuning in Velocity Mode
Can be better, it seems like a lingering f-error.
For starters
FF0=0
FF1= this has to be found first so that jogging does not cause f-errors but tracks nicely through the middle of the graph. Only after this is found and if there are spikes of f-error at the start and end of the move, you can try adding a bit of FF0
For starters
FF0=0
FF1= this has to be found first so that jogging does not cause f-errors but tracks nicely through the middle of the graph. Only after this is found and if there are spikes of f-error at the start and end of the move, you can try adding a bit of FF0
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-
Less
More
- Posts: 19886
- Thank you received: 4645
22 Oct 2023 17:18 #283516
by andypugh
Replied by andypugh on topic Servo Tuning in Velocity Mode
Is this a metric or imperial machine?
I think that it looks like P might be too high, and it is oscillating.
If FF1 is right you ought to be able to get OK results with a P I and D of zero.
Have you connected the velocity commands to the PID command-deriv input?
I think that it looks like P might be too high, and it is oscillating.
If FF1 is right you ought to be able to get OK results with a P I and D of zero.
Have you connected the velocity commands to the PID command-deriv input?
Please Log in or Create an account to join the conversation.
- PCW
-

- Online
- Moderator
-
Less
More
- Posts: 17997
- Thank you received: 5284
22 Oct 2023 19:32 #283528
by PCW
Replied by PCW on topic Servo Tuning in Velocity Mode
For velocity mode servos, FF1 is the most important term to tune.
I would set P to a low value (say 1) and tune FF1 for minimum following error
during the constant velocity section of a jog. Then increase P until oscillationn begin
and the reduce the P term to about 50% of that value
I would set P to a low value (say 1) and tune FF1 for minimum following error
during the constant velocity section of a jog. Then increase P until oscillationn begin
and the reduce the P term to about 50% of that value
Please Log in or Create an account to join the conversation.
- SkyMoCo
- Offline
- Junior Member
-
Less
More
- Posts: 33
- Thank you received: 4
23 Oct 2023 05:37 - 26 Oct 2023 16:23 #283575
by SkyMoCo
Replied by SkyMoCo on topic Servo Tuning in Velocity Mode
It's a german cnc router so native is metric units. I started where things were jerky and it moved in fits and starts, but now it's pretty smooth. It's a lot of fun learning and I don't want to end up with a working machine by pure luck. I've kept lots of note and hope to do a full build log once I know it's actually going to work. Are screenshots workable, or would video be more helpful. Are there posts or pictures of "this is a good looking halscope"?
This is where I am at now.
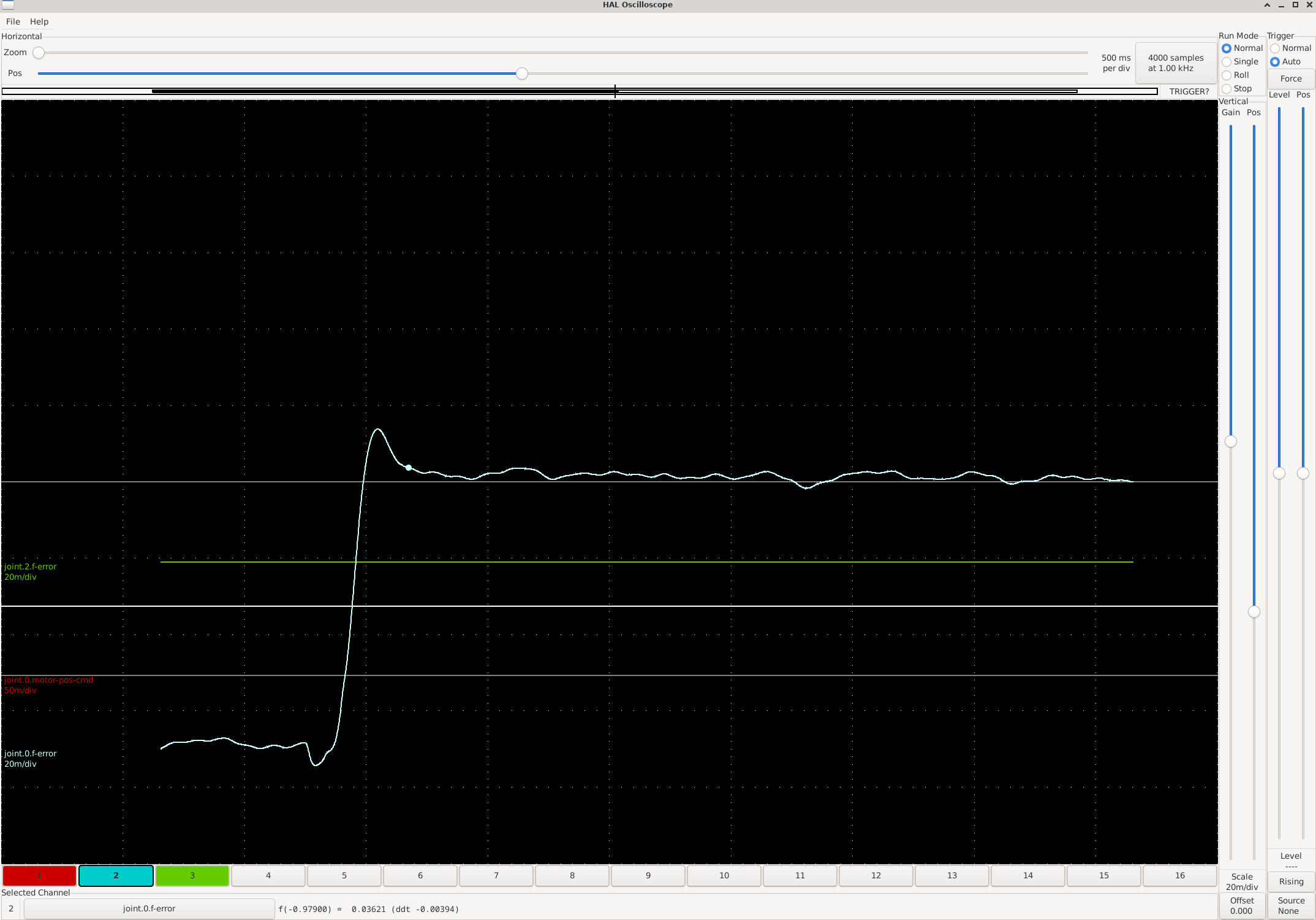
If I go lower with P (Right now it's in the 25-30 range) at high speed I get following errors.
This is where I am at now.
If I go lower with P (Right now it's in the 25-30 range) at high speed I get following errors.
Last edit: 26 Oct 2023 16:23 by SkyMoCo. Reason: Added photo
Please Log in or Create an account to join the conversation.
Time to create page: 0.204 seconds