- Configuring LinuxCNC
- Advanced Configuration
- Need help in implementing kinematics of 5 axis XYZAB configuration
Need help in implementing kinematics of 5 axis XYZAB configuration
- amanker
- Offline
- Premium Member
-

Less
More
- Posts: 119
- Thank you received: 2
12 May 2024 08:54 #300425
by amanker
Need help in implementing kinematics of 5 axis XYZAB configuration was created by amanker
I have modified my hobby grade machine to implement 5 axis. According to my requirements I have decided to go for A Rotary axis and rotary head in B. That will give me 4 axis maching which I will planning to use mostly with max stock length and if my peice require 5 axis toolpath, then I can switch to that without changing table.
I have all this implemented in grbl and tested it. Now I want to venture into LinuxCNC world. Since GRBL dont support RTCP. I have searched net and LinuxCNC documents but didn't found info about XYZAB configuration. Didn't even seen youtube videos about this configuration. Here is link to my machine video, it will help in understanding what type of configuration I am using.
www.reddit.com/r/hobbycnc/s/RgIzLvVqyw
Any help in this regard will be highly appreciated.
I have all this implemented in grbl and tested it. Now I want to venture into LinuxCNC world. Since GRBL dont support RTCP. I have searched net and LinuxCNC documents but didn't found info about XYZAB configuration. Didn't even seen youtube videos about this configuration. Here is link to my machine video, it will help in understanding what type of configuration I am using.
www.reddit.com/r/hobbycnc/s/RgIzLvVqyw
Any help in this regard will be highly appreciated.
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

Less
More
- Posts: 4766
- Thank you received: 2138
12 May 2024 09:30 #300430
by Aciera
Replied by Aciera on topic Need help in implementing kinematics of 5 axis XYZAB configuration
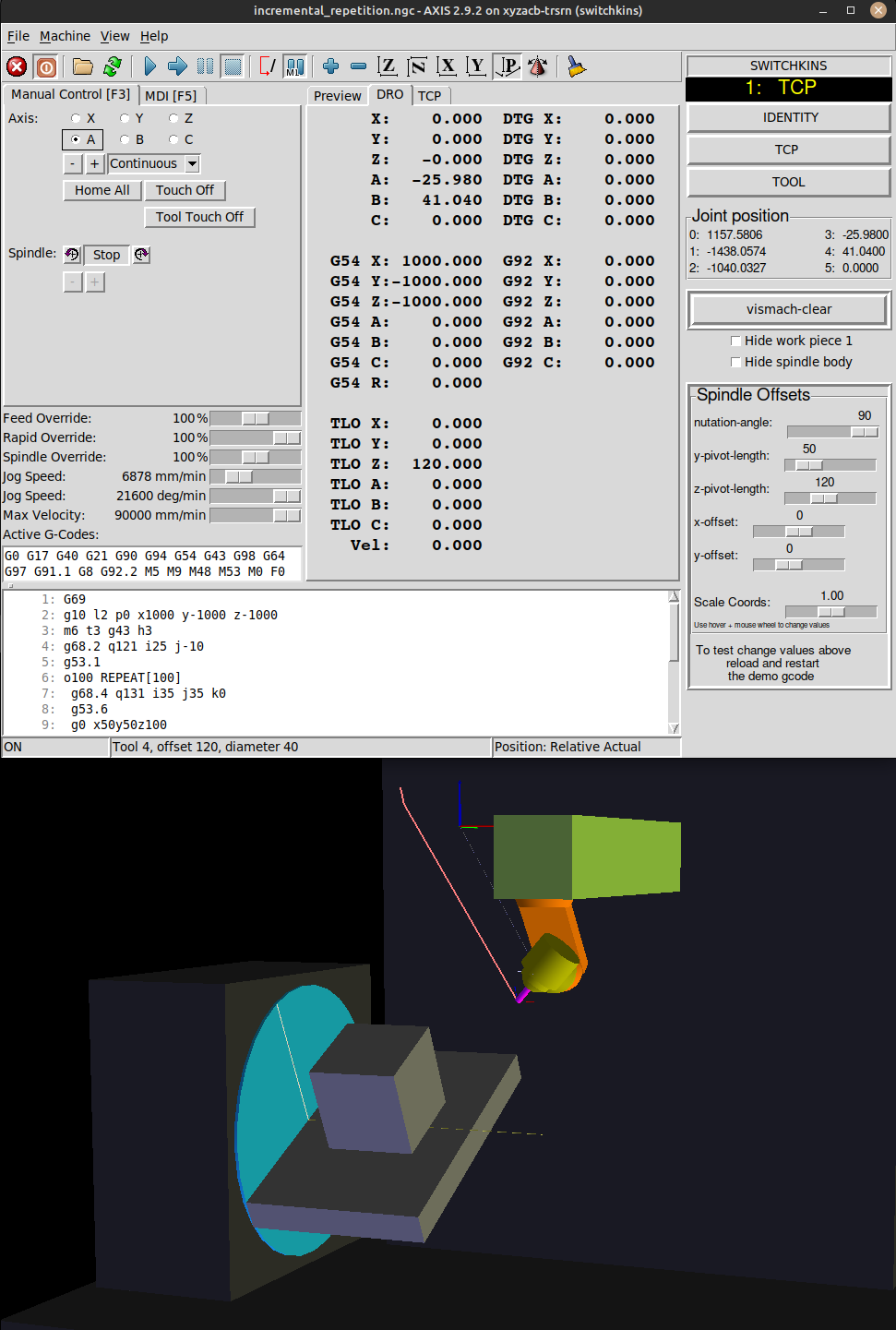
You will need a custom kinematic for that. I did some work for a 6 axis kinematic that should also work for you. Have a look at the 'xyzacb-trsrn' config in the zipped folder here:
forum.linuxcnc.org/show-your-stuff/49103...-head?start=0#271334
Notes:
- for your purpose set the 'nutation-angle' to 90
- leave the C spindle rotary at 0 (ie just ignore it since your machine does not have a C-axis)
- for more information have a look at the Documentation folder included
forum.linuxcnc.org/show-your-stuff/49103...-head?start=0#271334
Notes:
- for your purpose set the 'nutation-angle' to 90
- leave the C spindle rotary at 0 (ie just ignore it since your machine does not have a C-axis)
- for more information have a look at the Documentation folder included
Attachments:
Please Log in or Create an account to join the conversation.
- amanker
- Offline
- Premium Member
-
Less
More
- Posts: 119
- Thank you received: 2
12 May 2024 18:13 #300463
by amanker
Replied by amanker on topic Need help in implementing kinematics of 5 axis XYZAB configuration
Thanks for reply and help. I may need some more help. I will try it. Report it back.
Please Log in or Create an account to join the conversation.
- Configuring LinuxCNC
- Advanced Configuration
- Need help in implementing kinematics of 5 axis XYZAB configuration
Time to create page: 0.109 seconds