6DOF robot Limit Issues
- Project_Hopeless
-
 Topic Author
Topic Author
- Offline
- Elite Member
-

- Posts: 200
- Thank you received: 10
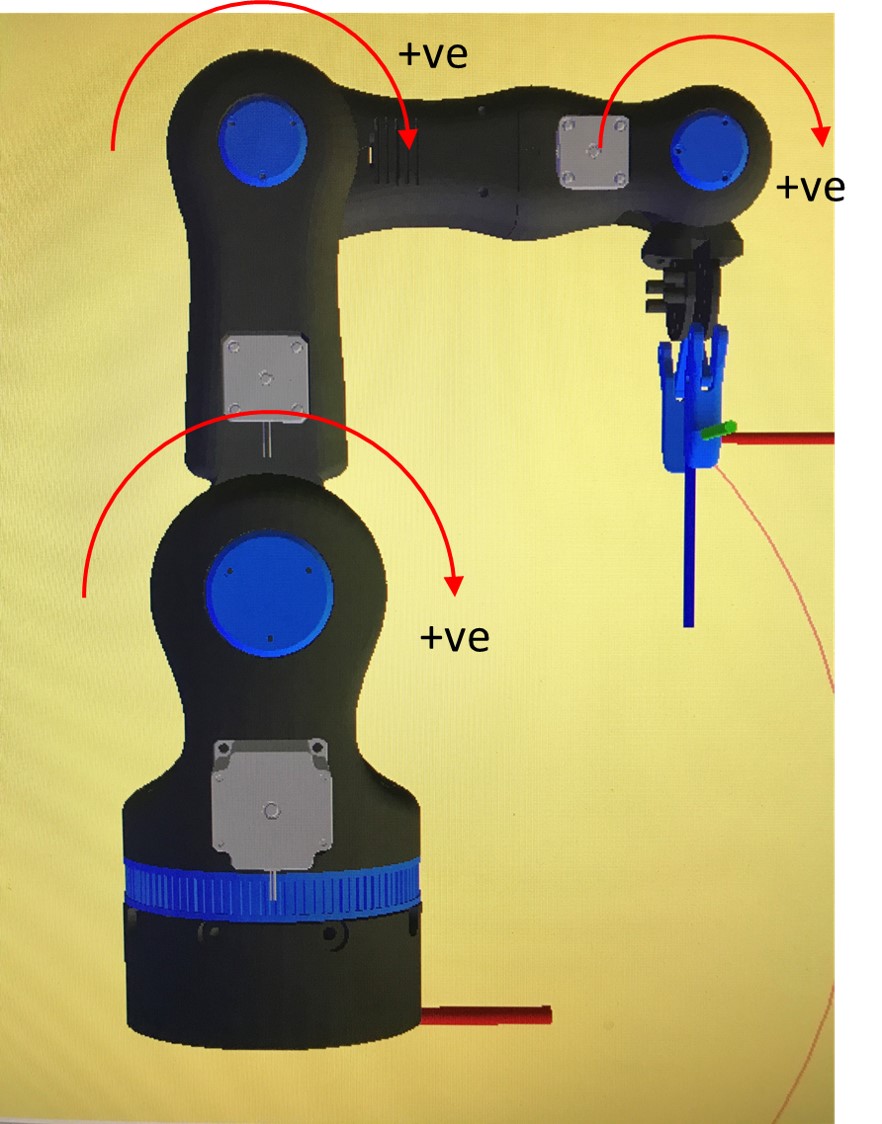
With axis 2 limit set to -45/+110 I'm getting a error at -20 degrees. It appears the axis limits are rotated 90 degress some how. Is there an absolute vs. relative setting?
I could fudge the limit settings but I want it done right. How should I define the axis limits?
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

- Posts: 4770
- Thank you received: 2138
Please Log in or Create an account to join the conversation.
- Project_Hopeless
-
Topic Author
- Offline
- Elite Member
-
- Posts: 200
- Thank you received: 10
M66 E0 L0 ; force synch
M68 E#<SWITCHKINS_PIN> Q#<kinstype> ; set kinstype value
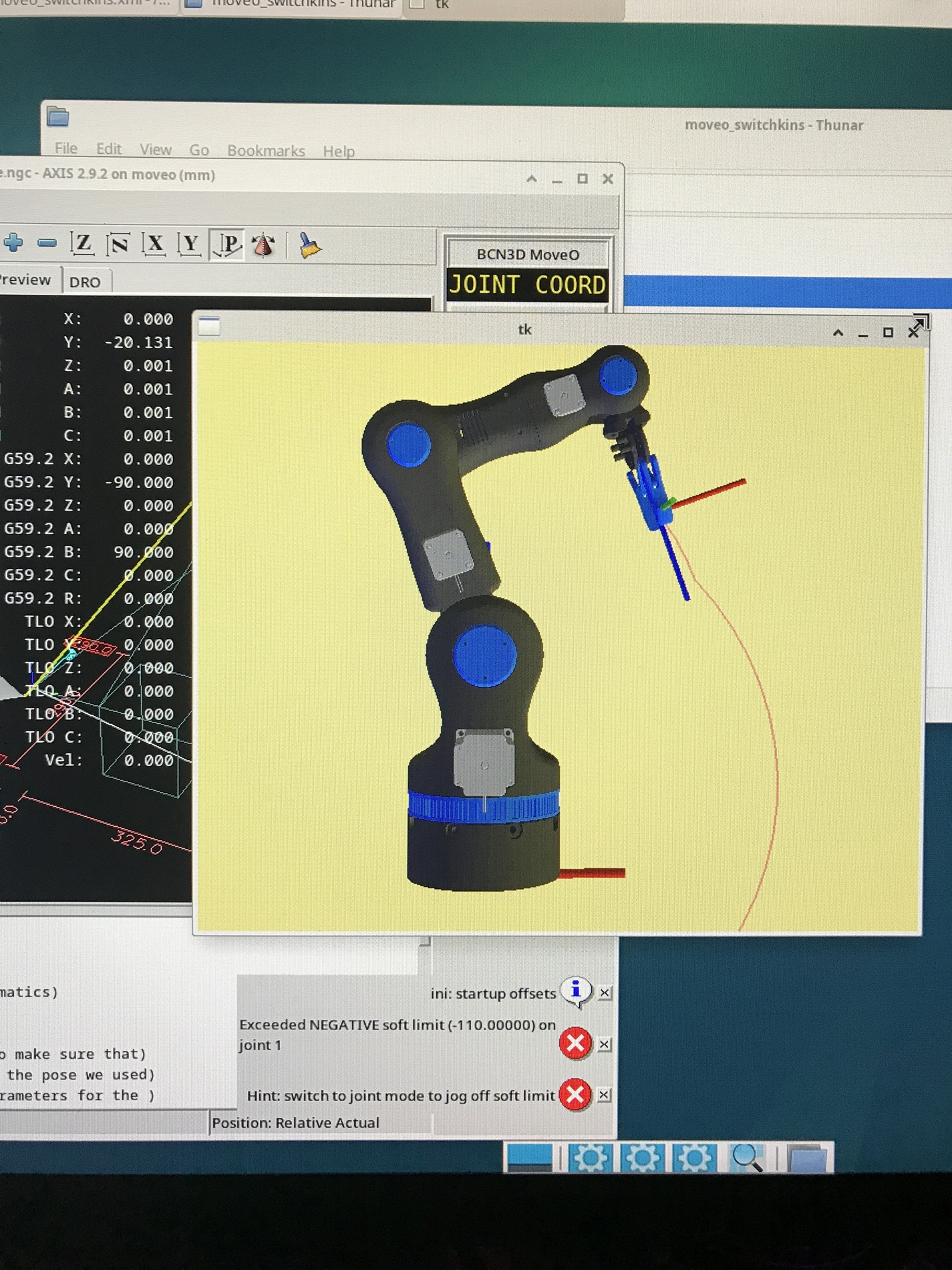
G10 L2 P8 X0 Y-90 Z0 A0 B90 C0
G59.2
M66 E0 L0 ; force synch
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
- Posts: 4770
- Thank you received: 2138
[edit]
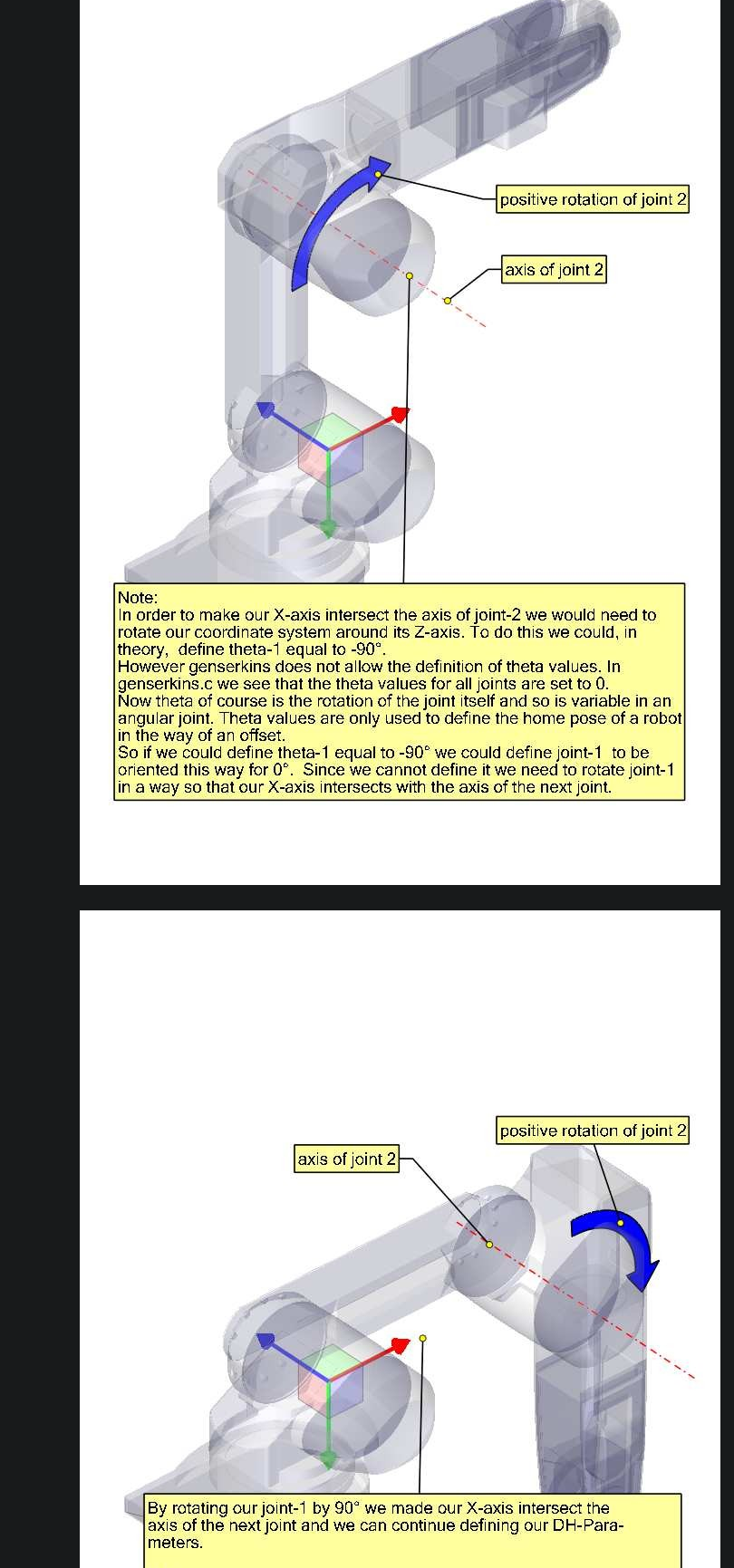
Actually I just noticed that you are not getting an 'axis' limit error but a 'joint' limit error. So the issue is that you have to adjust your 'MIN_LIMIT' , 'MAX_LIMIT' values in the [JOINT_1] section of your ini file. Note that joint1=0 has the upper arm in the horizontal forward pose as that is what is used in the genserkins model so you may need to adjust the limit values accordingly.
www.linuxcnc.org/docs/2.9/html/sv/motion/dh-parameters.html
Attachments:
Please Log in or Create an account to join the conversation.
- Project_Hopeless
-
Topic Author
- Offline
- Elite Member
-
- Posts: 200
- Thank you received: 10
So the joint axis limits in this case are relative the arm posture defined by the modified DH parameters?Aciera post=312133 userid=25994You don't _need_ it, those are simply used to define the pose for (x,y,z,a,b,c)=(0,0,0,0,0,0).
[edit]
Actually I just noticed that you are not getting an 'axis' limit error but a 'joint' limit error. So the issue is that you have to adjust your 'MIN_LIMIT' , 'MAX_LIMIT' values in the [JOINT_1] section of your ini file. Note that joint1=0 has the upper arm in the horizontal forward pose as that is what is used in the genserkins model so you may need to adjust the limit values accordingly.
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
- Posts: 4770
- Thank you received: 2138
You can watch the current commanded joint position in the 'halshow' tool under:
'joint.N.motor-pos-cmd'
Where 'N' denotes the joint number (ie 1 for the joint in question).
Please Log in or Create an account to join the conversation.